






2025年4月16日|作者:小迈的学习笔记|分类:pid算法部署到c++工程
引言:在工业控制,机器人,电源控制,自动驾驶,等众多领域,PID(比例-积分微分)算法作为经典的控制策略,因其结构简单,适应性强等特点,广泛应用于各种控制领域。然而,理论层面的PID公式仅仅是起点,如何将其高效,稳定的部署到实际的工程中,是初学者不可避免的一关
C++凭借其高性能,跨平台特性以及对底层硬件的直接操控能力,成为工业级控制系统的首选语言。但复杂的项目结构,多平台兼容性以及算法模块与工程框架的集成问题,常常让初学者陷入“算法能用,工程难用”的困境。此时,Cmake作为现代C++工程的构建工具,能够有效管理代码依赖,有效管理流程,显著提升项目的可维护性和可移植性
本文以实战为导向(LINUX+UBUNTU22.04+ROS2环境下),从PID的原理出发,到C++实现,结合CMake工具,逐步将控制算法模块化,并最终移植到实际工程框架中。无论你是控制领域的新手,还是希望优化工程实践的开发者,都能学会一些可落地的工程方案
一.算法原理
- 比例项(P) :与当前误差成正比
- 积分项( I ) :与当前误差积累量成正比
- 积分项(D) :与误差变化率成正比
- 输出公式:

- 离散化形式(离散化的原因是在代码中实现连续型运算比较难以实现,我们一般用离散化运算来逼近实际值

二.实现代码
- 计算error值(目标值与实测值相减):
double error = target - current;
- 计算误差积分(加上积分限幅,防止积分爆炸):
integral += error;//积分项运算
integral = std::clamp(integral,-integral_limit,integral_limit);//添加积分限幅
- 计算误差微分(时间戳暂时省略,先用一个dt代替):
double derivative = (error - last_error)/dt
- 定义PID控制器的值
double Kp,Ki,Kd;//比例,积分,微分系数
double intergral;//积分积累量
double laster_error;//上一次误差
double output_limit//输出限幅
- 计算输出值(加上一个输出限幅,增加系统稳定性和安全性)
double output = Kp * error + Ki * integral + kd * derivative;
if (output > out_put_limit) return output_limit;
if (output < -out_put_limit) return -output_limit;
return output;
- 创建PID重置函数(适配一些控制系统的需要)
void reset()
{
integral = 0;
last_error = 0;
}
上述就是创建一个pid控制器的思路,我们把这些放在一个C++类里面实现
#include <iostream>
class PIDController
{
private:
double Kp,Ki,Kd;//比例,积分,微分系数
double intergral;//积分积累量
double laster_error;//上一次误差
double output_limit//输出限幅
public:
//构造函数
PIDController(double p,double i,double d,double limit = 1000.0)
:Kp(p),Ki(i),Kd(d),integral(0),last_error(0),outpit_limit(limit){}
//计算控制量
double compute(double current,double target,double dt)
{
id(dt<=0) return 0;//避免被除以0
double error = target - current;//误差项运算
integral += error;//积分项运算
integral = std::clamp(integral,-integral_limit,integral_limit);//添加积分限幅
double derivative = (error - last_error)/dt
last_error = error;//保存当前误差
double output = Kp * error + Ki * integral + kd * derivative;
//输出限幅
if (output > out_put_limit) return output_limit;
if (output < -out_put_limit) return -output_limit;
return output;
}
void reset()
{
integral = 0;
last_error = 0;
}
};
创建好类了,我们该如何使用它呢?
int main()
{
//初始化PID参数:Kp=2.0,Ki=0.5,Kd=0.1,输出限幅100
PIDControler pid(2.0,0.5,0.1,100);
double current_value = 25.0;//当前系统状态
double target_value = 50.0; //目标值
double dt = 0.1;
for (int i = 0; i < 10 ; ++i)
{
double output pid.compute(current_value,target_value,dt);
//模拟系统响应(简单一阶系统)
current_value += output * dt * 0.1;
std::cout << "Step" << i+1
<< ":Output=" << output
<< ", Current = " << current_value << std::endl;
}
return 0;
}
这样我们就完成了一个C++实现PID的简单实例。恭喜你通过了新手村!🪅🪅🪅
三.工程实例
由于Linux是开源的操作系统,有非常多方便的开发工具可以使用,开发者非常喜欢的操作系统,所以再次使用Linux操作系统作为例子
接下来我们将在UBUNTU22,04环境中,以ROS2(humble)控制PX4实现无人机运动闭环控制为例子,带你进一步了解如何使用CMake将针对性写的PID文件部署到工程中
- 相关环境配置教程
- https://blog.csdn.net/qq_41035541/article/details/135220472?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522a5633f41b420740b0910ef99ec6b9e2e%2522%252C%2522scm%2522%253A%252220140713.130102334…%2522%257D&request_id=a5633f41b420740b0910ef99ec6b9e2e&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2alltop_click~default-1-135220472-null-null.142v102pc_search_result_base3&utm_term=ubuntu22.04%E5%8F%8C%E7%B3%BB%E7%BB%9F&spm=1018.2226.3001.4187(配置linux双系统)
- https://blog.csdn.net/weixin_55944949/article/details/130848009?spm=1001.2014.3001.5502(ROS2加px4环境配置)
环境配好之后,我们来下载官方代码
git clone https://github.com/PX4/px4_ros_com.git
下载好了之后我们创建一个工作空间
mkdir -p ~/ros2_ws/src
cd ~/ros2_ws
使用图形化界面将代码文件移植到工作空间中
可以看到
然后我们下载vscode(最受欢迎的代码编辑器),推荐鱼香ros一键安装
wget http://fishros.com/install -O fishros && . fishros

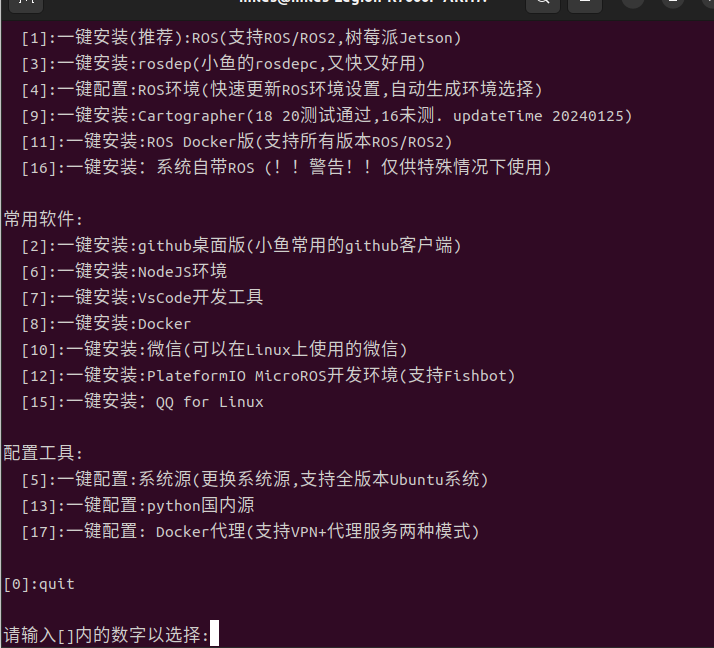
选择7即可发现电脑已经安装vscode
然后下载好python,c++,ros2,cmake插件,再在vscode中打开工程
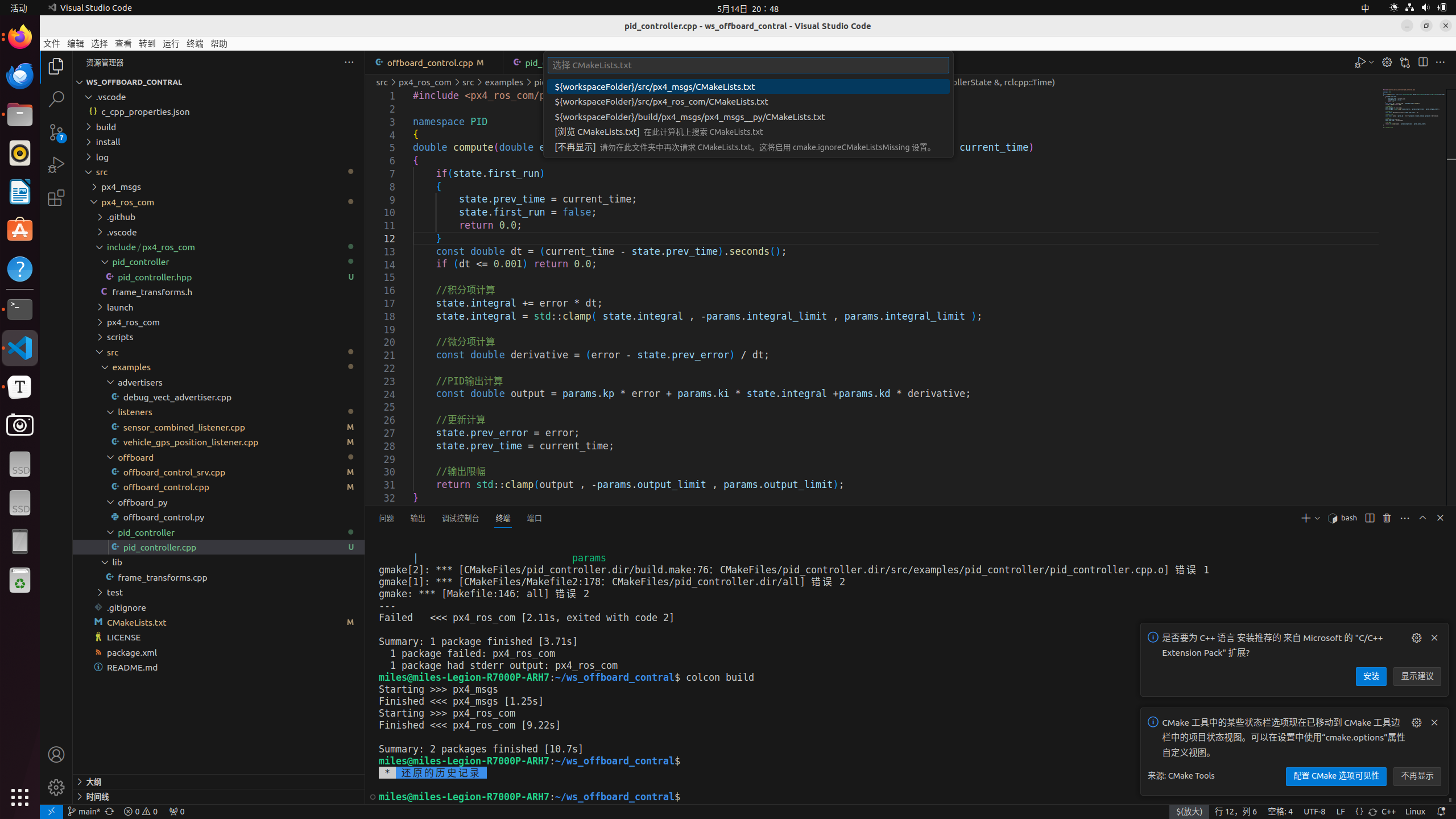
就可以看到这些
未完待续。。。。。。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









