






 本文详细描述了一款基于STM32F103C8T6单片机的太阳能光伏寻光源系统,包括硬件组成(STM32、TFT彩屏、太阳能板等)、电源管理、自动和手动模式操作以及电池电量监测。系统通过光敏传感器和步进电机实现自动追踪光源并提供手动控制选项。
本文详细描述了一款基于STM32F103C8T6单片机的太阳能光伏寻光源系统,包括硬件组成(STM32、TFT彩屏、太阳能板等)、电源管理、自动和手动模式操作以及电池电量监测。系统通过光敏传感器和步进电机实现自动追踪光源并提供手动控制选项。
22-121、基于STM32单片机太阳能光伏寻光源双轴自动追光设计
产品功能描述:
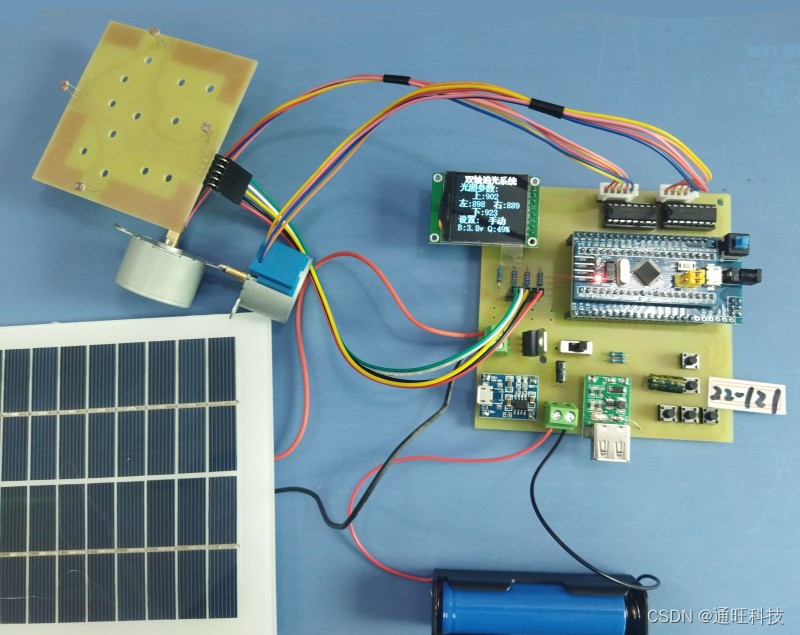
本系统由STM32F103C8T6单片机核心板、1.44寸TFT彩屏、太阳能板、稳压电路、锂电池充电保护TP4056、升压稳压模块、光敏采集电路、步进电机及ULN2003驱动电路、按键电路组成。
该系统分两块板子,主控板和光敏采集板,通过连接线连接。主控板主要进行电源管理、彩屏显示、按键控制、ULN2003步进电机驱动。光敏采集板主要放置光敏传感器,模拟太阳能板的运作。
注意:光敏电阻放在光敏采集板上,所以主控板上光敏电阻不焊接。
【1】太阳能板通过采集光能转化为电能,经过稳压电路稳压后,传送给锂电池充电保护TP4056模块,然后给锂电池充电。锂电池经过升压稳压模块稳压到5V给整个系统供电,中间有电源开关。
系统上电后,默认“自动模式”,可以通过按键切换为“手动模式”。
【2】无论自动、手动模式,1.44寸TFT彩屏实时显示光敏电阻采集的数据范围是0-1000。光敏电阻分为上、下、左、右四个方位。2路步进电机驱动电路,步进电机焊接在一块形成2个自由度的转动即上下翻滚和左右转动。其中上端的步进电机焊接在光敏采集板上。主控板和光敏采集板,通过连接线连接。
【3】“自动模式”:自动追寻光照较强的方向。如果上面光照采集高于下面光照,STM32单片机驱动上端电机向上翻转;如果下面光照采集高于上面光照,STM32单片机驱动上端电机向下翻转;如果上下光照采集几乎一致,上端电机不动作。同样的,如果左侧光照采集高于右侧光照,STM32单片机驱动下端电机向左侧转动;如果右侧光照采集高于左侧光照,STM32单片机驱动下端电机向右侧转动;如果左右光照采集几乎一致,下端电机不动作。从而自动实现,上下光照平衡,左右光照平衡,并且朝向光照较强的方向。
【4】“手动模式”,通过按键,设置进入手动模式,其他四个按键分别控制步进电机:上翻,下翻,左转,右转。按键按一下,步进电机微动一点,持续按下步进电机持续动作。实现手动控制电机运行到某一状态。
【5】STM32采集锂电池电压并换算容量大小,显示在彩屏上,如果锂电池的容量低于45%,红色显示提醒。两个步进电机停止动作和转动过程,拉电流区别较大,此时容量会有波动属于正常现象。
【6】注意:如果锂电池电量不足,且天气不好无法太阳能充电。可以用手机充电器USB头查到TP4056模块上直接给锂电池充电。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









