







先贴题目
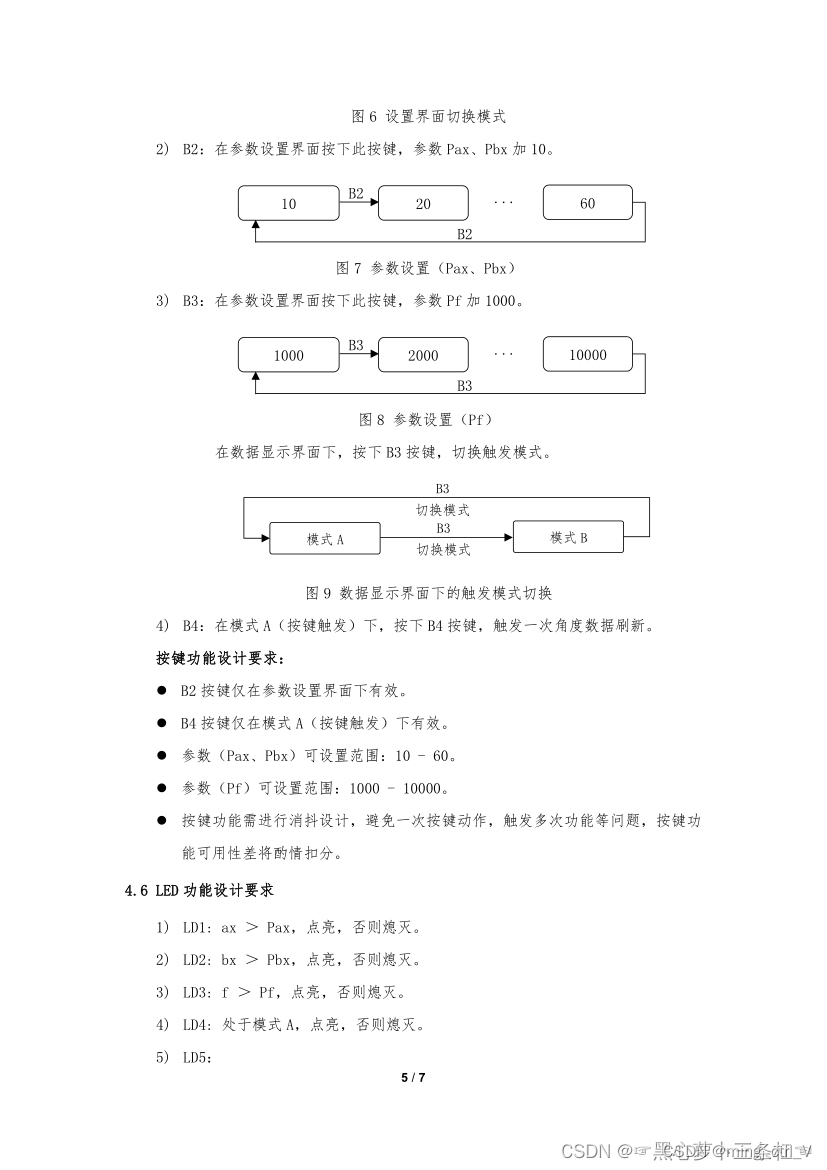
- LCD部分
- 和之前写的并没有什么不同
/* 需要用到的变量 */
float data_a = 0.0;
float data_a_temp = 0.0;
float data_b = 0.0;
float data_b_temp = 0.0;
uint16_t data_f = 0;
uint8_t data_ax = 0;
uint8_t data_bx = 0;
char data_mode = 'A';
uint8_t para_pax = 20;
uint8_t para_pbx = 20;
uint16_t para_pf = 1000;
void page(uint8_t page_select)
{
char str1[20],str2[20],str3[20],str4[20],str5[20],str6[20],str7[20];//最长20
static uint8_t str1_len = 0;//行长度,行长度变短触发一次LCD刷新
static uint8_t str2_len = 0;
static uint8_t str3_len = 0;
static uint8_t str4_len = 0;
static uint8_t str5_len = 0;
static uint8_t str6_len = 0;
static uint8_t str7_len = 0;
if(page_select == 1)
{
if(data_a > data_a_temp)
data_ax = data_a - data_a_temp;
else
data_ax = data_a_temp - data_a;
if(data_b > data_b_temp)
data_bx = data_b - data_b_temp;
else
data_bx = data_b_temp - data_b;
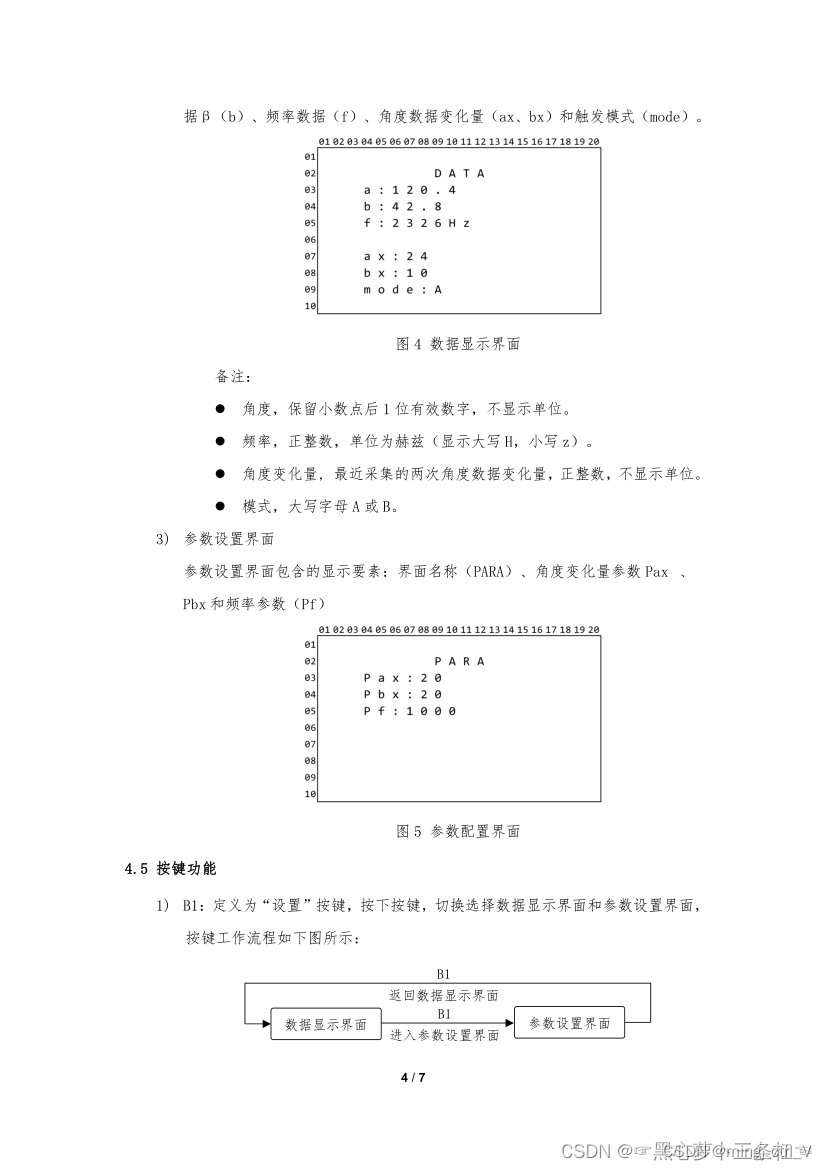
sprintf(str1," DATA");
sprintf(str2," a:%0.1f",data_a);
sprintf(str3," b:%0.1f",data_b);
sprintf(str4," f:%dHz",data_f);
sprintf(str5," ax:%d",data_ax);
sprintf(str6," bx:%d",data_bx);
sprintf(str7," mode:%c",data_mode);
}
if(page_select == 2)
{
sprintf(str1," PARA");
sprintf(str2," Pax:%d",para_pax);
sprintf(str3," Pbx:%d",para_pbx);
sprintf(str4," Pf:%d",para_pf);
sprintf(str5,"");
sprintf(str6,"");
sprintf(str7,"");
}
if(str1_len>strlen(str1) || str2_len>strlen(str2) || str3_len>strlen(str3) || str4_len>strlen(str4) || str5_len>strlen(str5) || str6_len>strlen(str6) || str7_len>strlen(str7))
LCD_Clear(Black);
LCD_DisplayStringLine(Line1,(uint8_t*)str1);
LCD_DisplayStringLine(Line2,(uint8_t*)str2);
LCD_DisplayStringLine(Line3,(uint8_t*)str3);
LCD_DisplayStringLine(Line4,(uint8_t*)str4);
LCD_DisplayStringLine(Line6,(uint8_t*)str5);
LCD_DisplayStringLine(Line7,(uint8_t*)str6);
LCD_DisplayStringLine(Line8,(uint8_t*)str7);
str1_len = strlen(str1);
str2_len = strlen(str2);
str3_len = strlen(str3);
str4_len = strlen(str4);
str5_len = strlen(str5);
str6_len = strlen(str6);
str7_len = strlen(str7);
}
- 按键KEY
#define KEY1 HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_0)
#define KEY2 HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_1)
#define KEY3 HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_2)
#define KEY4 HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0)
#define KEY1_PRE 1
#define KEY2_PRE 2
#define KEY3_PRE 3
#define KEY4_PRE 4
/* 按下即生效,没有松手检测 */
uint8_t key_scan()
{
static uint8_t key_up = 1;/* 按键松开标志 */
if((KEY1 == 0 || KEY2 == 0 || KEY3 == 0 || KEY4 == 0) && key_up)
{
HAL_Delay(10);
key_up = 0;
if(KEY1 == 0)
return KEY1_PRE;
if(KEY2 == 0)
return KEY2_PRE;
if(KEY3 == 0)
return KEY3_PRE;
if(KEY4 == 0)
return KEY4_PRE;
}else if((KEY1 == 1) && (KEY2 == 1) && (KEY3 == 1) && (KEY4 == 1))
{
key_up = 1;
}
return 0;
}
- 频率和占空比测量部分
//main函数初始化
HAL_TIM_Base_Start_IT(&htim2);
HAL_TIM_IC_Start_IT(&htim2,TIM_CHANNEL_2);
HAL_TIM_Base_Start_IT(&htim3);
HAL_TIM_IC_Start_IT(&htim3,TIM_CHANNEL_1);
HAL_TIM_Base_Start_IT(&htim17);
HAL_TIM_IC_Start_IT(&htim17,TIM_CHANNEL_1);
/* 结构体用于存储数据 */
typedef struct
{
float data_a_note[5];//按时间顺序存储
float data_b_note[5];
float data_a_order[5];//按大小顺序存储
float data_b_order[5];
uint8_t a_index;
uint8_t b_index;
}note;
note data_note;
/* 新数据入组,旧数据右移一位 */
void data_note_write(uint8_t select,float data)
{
uint8_t i = 0;
if(select == 'a')
{
for(i = data_note.a_index; i > 0; i--)
{
data_note.data_a_note[i] = data_note.data_a_note[i - 1];
}
data_note.data_a_note[0] = data;
if(data_note.a_index < 4)
data_note.a_index++;
}
if(select == 'b')
{
for(i = data_note.b_index; i > 0; i--)
{
data_note.data_b_note[i] = data_note.data_b_note[i - 1];
}
data_note.data_b_note[0] = data;
if(data_note.b_index < 4)
data_note.b_index++;
}
}
/* 冒泡排序生成大小排序数组 */
void data_order(uint8_t select)
{
uint8_t i = 0;
float temp;
if(select == 'a')
{
memcpy(data_note.data_a_order,data_note.data_a_note,5*sizeof(float));
for(i = 0; i < 5-1; i++)
{
for(uint8_t j = i + 1; j < 5; j++)
{
if(data_note.data_a_order[i] > data_note.data_a_order[j])
{
temp = data_note.data_a_order[i];
data_note.data_a_order[i] = data_note.data_a_order[j];
data_note.data_a_order[j] = temp;
}
}
}
}else if(select == 'b')
{
memcpy(data_note.data_b_order,data_note.data_b_note,5*sizeof(float));
for(i = 0; i < 5 - 1; i++)
{
for(uint8_t j = i + 1; j < 5; j++)
{
if(data_note.data_b_order[i] > data_note.data_b_order[j])
{
temp = data_note.data_b_order[i];
data_note.data_b_order[i] = data_note.data_b_order[j];
data_note.data_b_order[j] = temp;
}
}
}
}
}
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)
{
// 占空比测量,默认是上升沿触发
//所以触发上升沿之后改为下降沿同时记录当前的计数
//记为上升沿的维持时间,相关值清零,然后转变成下降沿触发,
//下降沿触发之后记录当前的计数,记为下降沿的维持时间
//有了上升沿和下降沿的持续时间就能计算占空比了
/**************************************************/
if(htim->Instance == TIM2)
{
++timer1_up;
if(timer1_up == 1)
{
__HAL_TIM_DISABLE(htim);
__HAL_TIM_SetCounter(htim,0);
timer1_cnt = 0;
__HAL_TIM_ENABLE(htim);
}
else if(timer1_up == 2)
{
__HAL_TIM_DISABLE(htim);
timer1_cnt = HAL_TIM_ReadCapturedValue(htim,TIM_CHANNEL_2) + 10000 * timer1_over;
pa1_f = 1000000 / timer1_cnt;
data_f = pa1_f;
if(data_f < 1000)
data_f = 1000;
else if(data_f > 18000)
data_f = 18000;
timer1_up = 0;
timer1_cnt = 0;
timer1_over = 0;
__HAL_TIM_SetCounter(htim,0);
__HAL_TIM_ENABLE(htim);
}
}
if(htim->Instance == TIM3)
{
if(timer2_upflag == 1)
{
__HAL_TIM_DISABLE(htim);
timer2_up_count = 10000 * timer2_over + HAL_TIM_ReadCapturedValue(htim,TIM_CHANNEL_1);;
timer2_upflag = 0;
timer2_downflag = 1;
timer2_over = 0;
__HAL_TIM_SetCounter(htim,0);
__HAL_TIM_SET_CAPTUREPOLARITY(htim,TIM_CHANNEL_1,TIM_INPUTCHANNELPOLARITY_FALLING);
__HAL_TIM_ENABLE(htim);
}else
{
if(timer2_downflag == 1)
{
__HAL_TIM_DISABLE(htim);
timer2_down_count = 10000 * timer2_over + HAL_TIM_ReadCapturedValue(htim,TIM_CHANNEL_1);
timer2_upflag = 1;
timer2_downflag = 0;
timer2_over = 0;
__HAL_TIM_SetCounter(htim,0);
__HAL_TIM_SET_CAPTUREPOLARITY(htim,TIM_CHANNEL_1,TIM_INPUTCHANNELPOLARITY_RISING);
__HAL_TIM_ENABLE(htim);
}
}
}
/*********************************************************************/
//频率计算,第一个上升沿触发时开始清零相关值
//第二个上升沿触发时就可以取到计数值,换算一下就是频率值
if(htim->Instance == TIM17)
{
if(timer3_upflag == 1)
{
__HAL_TIM_DISABLE(htim);
timer3_up_count = 10000 * timer3_over + HAL_TIM_ReadCapturedValue(htim,TIM_CHANNEL_1);;
timer3_upflag = 0;
timer3_downflag = 1;
timer3_over = 0;
__HAL_TIM_SetCounter(htim,0);
__HAL_TIM_SET_CAPTUREPOLARITY(htim,TIM_CHANNEL_1,TIM_INPUTCHANNELPOLARITY_FALLING);
__HAL_TIM_ENABLE(htim);
}else
{
if(timer3_downflag == 1)
{
__HAL_TIM_DISABLE(htim);
timer3_down_count = 10000 * timer3_over + HAL_TIM_ReadCapturedValue(htim,TIM_CHANNEL_1);
timer3_upflag = 1;
timer3_downflag = 0;
timer3_over = 0;
__HAL_TIM_SetCounter(htim,0);
__HAL_TIM_SET_CAPTUREPOLARITY(htim,TIM_CHANNEL_1,TIM_INPUTCHANNELPOLARITY_RISING);
__HAL_TIM_ENABLE(htim);
}
}
}
/*********************************************************************/
/* 角度刷新 */
if(refresh_trigger)
{
timer2_block = ((float)timer2_up_count*100) / (timer2_up_count + timer2_down_count);//占空比
if(timer2_block <= 10)//占空比的可取范围是10~90
timer2_block = 10;
else if(timer2_block >= 90)
timer2_block = 90;
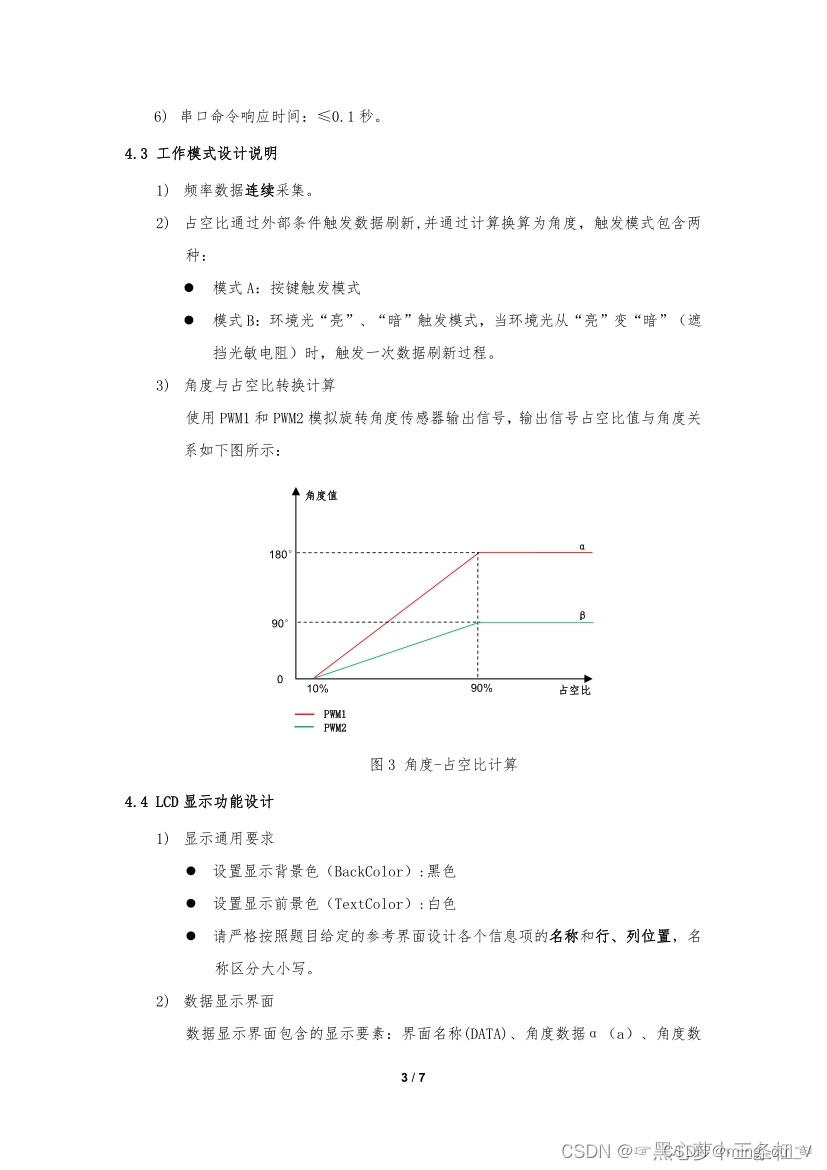
data_a = timer2_block * 2.25 - 22.5;//占空比换算角度值
timer3_block = ((float)timer3_up_count*100) / (timer3_up_count + timer3_down_count);
if(timer3_block <= 10)
timer3_block = 10;
else if(timer3_block >= 90)
timer3_block = 90;
data_b = timer3_block * 1.125 - 11.25;
refresh_trigger = 0;
data_note_write('a',data_a);
data_note_write('b',data_b);
}
/*********************************************************************/
}
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if(htim->Instance == TIM2)
{
if(timer1_up == 1)
timer1_over++;
}
if(htim->Instance == TIM3)
{
++timer2_over;
}
if(htim->Instance == TIM17)
{
++timer3_over;
}
}
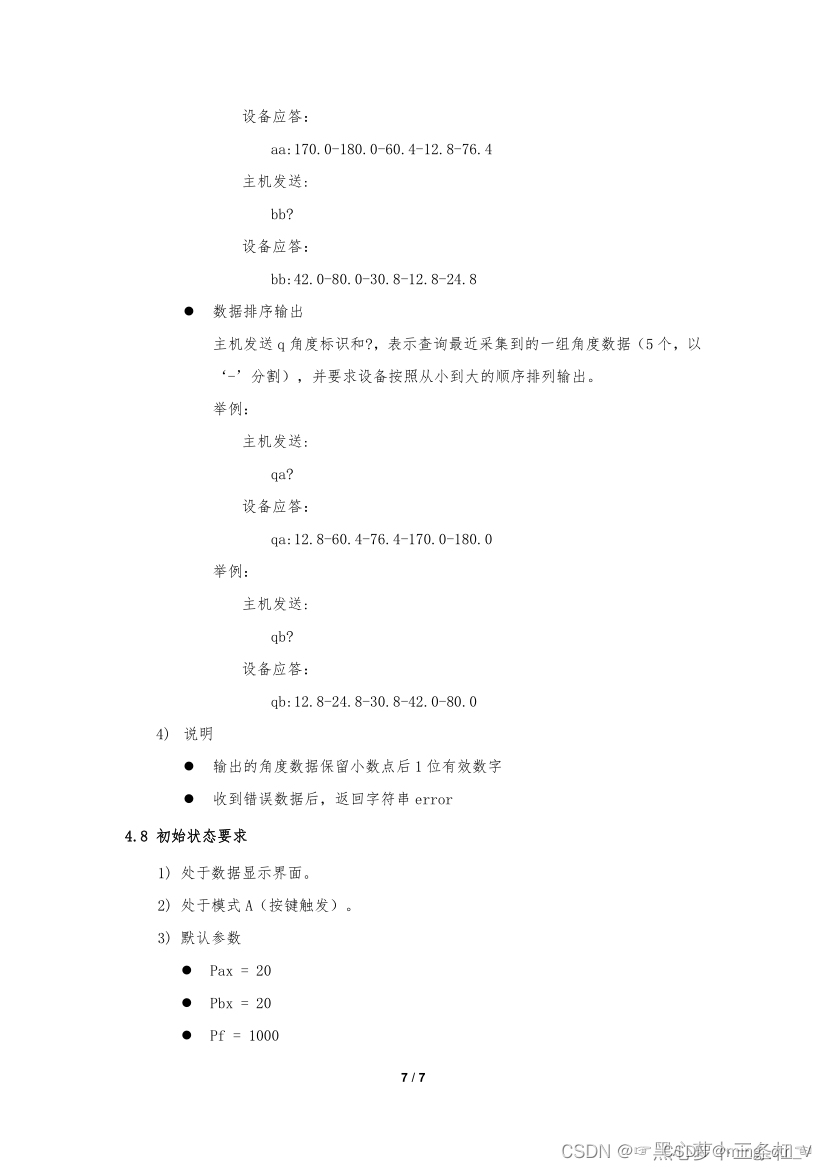
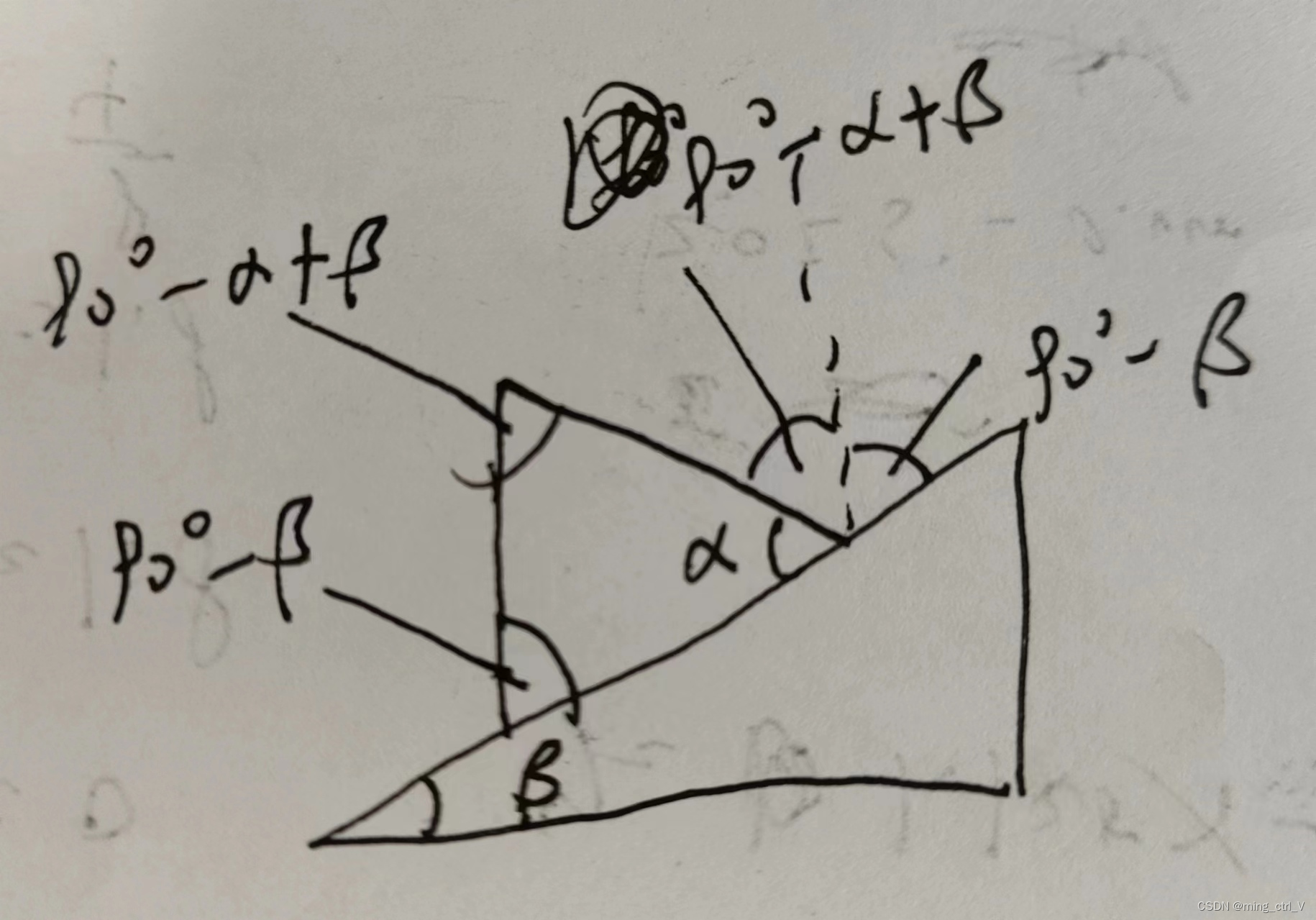
- LED部分
- 这部分比较特别的是LD5,得自己算一遍,算出来角度小于90-α+β<10时点亮
void led()
{
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_SET);
if(data_ax > para_pax)/* led1 */
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_8,GPIO_PIN_RESET);
else
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_8,GPIO_PIN_SET);
if(data_bx > para_pbx) /* led2 */
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_9,GPIO_PIN_RESET);
else
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_9,GPIO_PIN_SET);
if(data_f > para_pf)/* led3 */
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_10,GPIO_PIN_RESET);
else
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_10,GPIO_PIN_SET);
if(data_mode == 'A')
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_11,GPIO_PIN_RESET);
else
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_11,GPIO_PIN_SET);
if((90 - data_a + data_b) < 10 && data_a < (90 + data_b) )
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_12,GPIO_PIN_RESET);
else
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_12,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_13,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_14,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_15,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_RESET);
}
- ADC部分太常规了就不写了
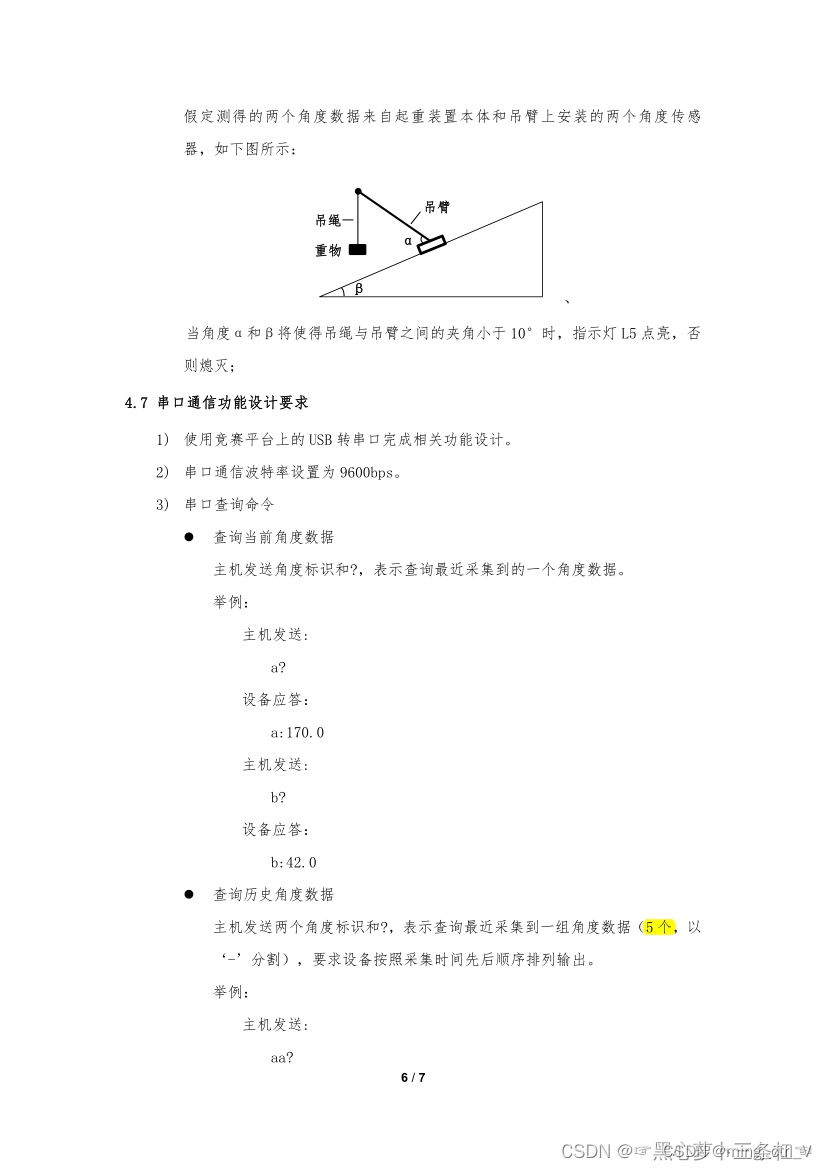
- 串口部分,仍然是使用空闲中断
//串口重定向,重定向一定要使能微库,把魔术棒点进去的USE MicroLIB打√
int fputc(int ch,FILE *f)
{
HAL_UART_Transmit(&huart1,(uint8_t*)&ch,1,HAL_MAX_DELAY);
return ch;
}
//main函数使能空闲中断
HAL_UARTEx_ReceiveToIdle_IT(&huart1,g_uart1_rx,128);
uint8_t g_uart1_rx[128];
/* 因为要求错误的数据接收要输出error,所以写的判断比较多 */
void HAL_UARTEx_RxEventCallback(UART_HandleTypeDef *huart, uint16_t Size)
{
if(huart->Instance == USART1)
{
/* 数据长度大于3是错误数据 */
if(strlen((const char*)g_uart1_rx) > 3)
{
printf("error\r\n");
}
/* 长度为2时有两个正确数据,其他的都是错误数据 */
else if(strlen((const char*)g_uart1_rx) == 2)
{
if(strstr((const char*)g_uart1_rx,"b?") != NULL)
{
printf("b:%0.1f\r\n",data_note.data_b_note[0]);
}
else if(strstr((const char*)g_uart1_rx,"a?") != NULL)
{
printf("a:%0.1f\r\n",data_note.data_a_note[0]);
}else
printf("error");
}
/* 长度为3时有4个正确数据,其他的都是错误数据 */
else if(strlen((const char*)g_uart1_rx) == 3)
{
if(strstr((const char*)g_uart1_rx,"aa?") != NULL)
{
printf("aa:%0.1f-%0.1f-%0.1f-%0.1f-%0.1f\r\n",data_note.data_a_note[0],data_note.data_a_note[1],data_note.data_a_note[2],data_note.data_a_note[3],data_note.data_a_note[4]);
}else if(strstr((const char*)g_uart1_rx,"qa?") != NULL)
{
data_order('a');
printf("qa:%0.1f-%0.1f-%0.1f-%0.1f-%0.1f\r\n",data_note.data_a_order[0],data_note.data_a_order[1],data_note.data_a_order[2],data_note.data_a_order[3],data_note.data_a_order[4]);
}
else if(strstr((const char*)g_uart1_rx,"bb?") != NULL)
{
printf("bb:%0.1f-%0.1f-%0.1f-%0.1f-%0.1f\r\n",data_note.data_b_note[0],data_note.data_b_note[1],data_note.data_b_note[2],data_note.data_b_note[3],data_note.data_b_note[4]);
}else if(strstr((const char*)g_uart1_rx,"qb?") != NULL)
{
data_order('b');
printf("qb:%0.1f-%0.1f-%0.1f-%0.1f-%0.1f\r\n",data_note.data_b_order[0],data_note.data_b_order[1],data_note.data_b_order[2],data_note.data_b_order[3],data_note.data_b_order[4]);
}else
printf("error");
}
//清空缓冲数组并重新使能空闲中断
memset(g_uart1_rx,0,strlen((const char*)g_uart1_rx) * sizeof(float));
HAL_UARTEx_ReceiveToIdle_IT(&huart1,g_uart1_rx,128);
}
}
- 最后贴一下main函数代码
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_ADC2_Init();
MX_TIM3_Init();
MX_USART1_UART_Init();
MX_TIM2_Init();
MX_TIM17_Init();
/* USER CODE BEGIN 2 */
I2CInit();
LCD_Init();
LCD_Clear(Black);
LCD_SetBackColor(Black);
LCD_SetTextColor(White);
HAL_ADCEx_Calibration_Start(&hadc2,ADC_SINGLE_ENDED); /* ADC自校准 */
HAL_TIM_Base_Start_IT(&htim2);
HAL_TIM_IC_Start_IT(&htim2,TIM_CHANNEL_2);
HAL_TIM_Base_Start_IT(&htim3);
HAL_TIM_IC_Start_IT(&htim3,TIM_CHANNEL_1);
HAL_TIM_Base_Start_IT(&htim17);
HAL_TIM_IC_Start_IT(&htim17,TIM_CHANNEL_1);
// HAL_UART_Receive_IT(&huart1,g_uart1_rx,128);
HAL_UARTEx_ReceiveToIdle_IT(&huart1,g_uart1_rx,128);
uint8_t page_select = 1;
uint8_t key = 0;
float light = 0;
uint8_t light_flag = 0;
data_note.a_index = 0;
data_note.b_index = 0;
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
key = key_scan();
switch(key)
{
case KEY1_PRE:page_select++;if(page_select == 3)page_select = 1;break;
case KEY2_PRE:
{
if(page_select == 2)
{
para_pax += 10;
para_pbx += 10;
if(para_pax == 70)para_pax = 10;
if(para_pbx == 70)para_pbx = 10;
}
break;
}
case KEY3_PRE:
{
if(page_select == 2)
{
para_pf += 1000;
if(para_pf == 11000)para_pf = 1000;
}else if(page_select == 1)
{
if(data_mode == 'A')
data_mode = 'B';
else if(data_mode == 'B')
data_mode = 'A';
}
break;
}
case KEY4_PRE:
{
refresh_trigger = 1;
break;
}
}
if(data_mode == 'B')
{
HAL_ADC_Start(&hadc2);
light = HAL_ADC_GetValue(&hadc2);
light = 100 - (light / 4096) * 100;
if(light > 40)
light_flag = 1;
else{
if(light_flag == 1)
refresh_trigger = 1;
light_flag = 0;
}
}
led();
if(page_refresh >= 100)
{
page(page_select);
page_refresh = 0;
}
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
完整代码见上传















 489
489

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









