






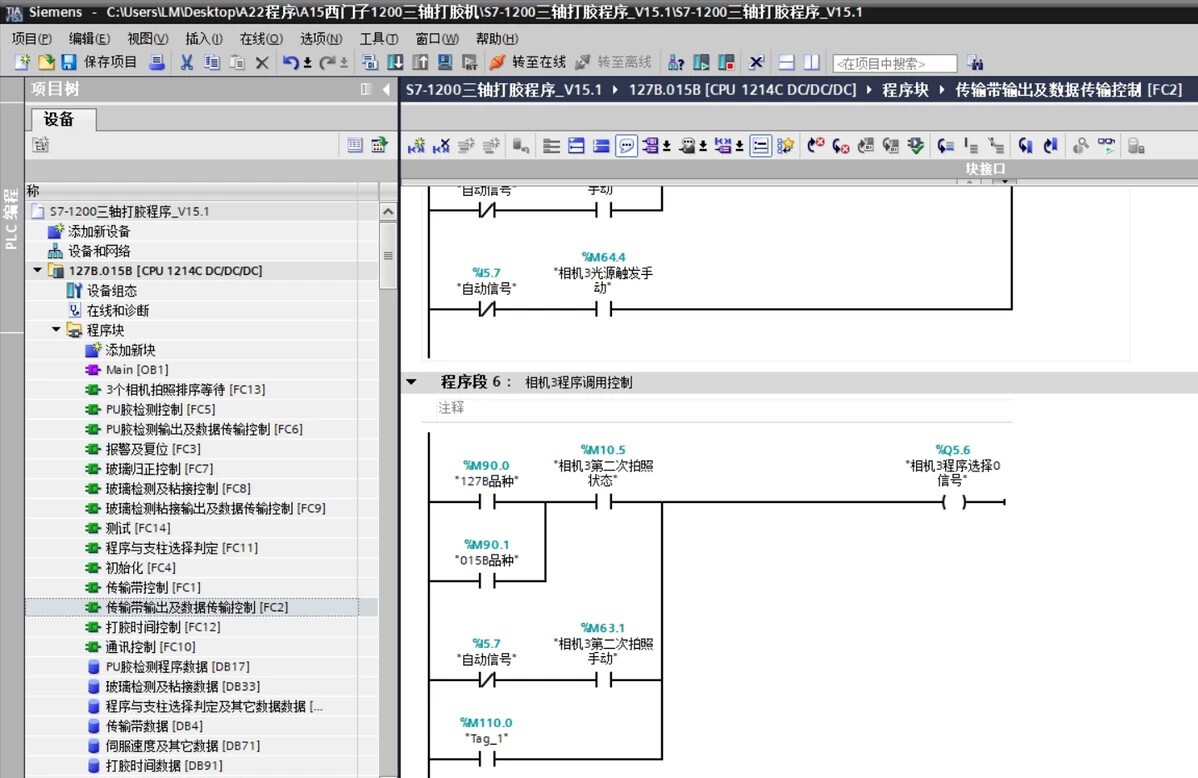
西门子1200三轴打胶机程序。
三轴运动控制定位,进行三维平面打胶,平面打胶,Z轴上下使能,PLC与工业相机进行TCP通信来读取定位偏差,传送数据通过比较完成精准定位。
程序支持博图15及以上。
程序自带注释。
ID:866642224677759
享太平盛世
标题:西门子1200三轴打胶机程序解析与优化
摘要:本文旨在深入分析西门子1200三轴打胶机程序的运动控制原理,并提出优化方法,以提高系统的稳定性和精准性。文章首先介绍了三轴运动控制定位的基本原理,接着详细阐述了平面打胶和Z轴上下使能的实现方法。其次,文章探讨了PLC与工业相机之间的TCP通信,以实现定位偏差的读取。最后,文章提出了程序的优化方案,包括支持博图15及以上版本和自带注释等功能,以提高程序的易读性和可维护性。
关键词:西门子1200;三轴打胶机;运动控制;TCP通信;定位偏差;程序优化
第一章 引言
三轴打胶机在工业生产中起到关键作用,其运动控制精度和稳定性对产品质量有直接影响。而西门子1200是一种常用的控制器,本文将围绕该控制器的三轴打胶机程序展开深入分析和优化。
第二章 三轴运动控制定位原理
2.1 三轴运动控制概述
三轴运动控制是指在三维空间内实现精准定位和运动控制。本节将介绍三轴运动控制的基本原理,包括坐标系的建立、轴的定义和坐标变换等。
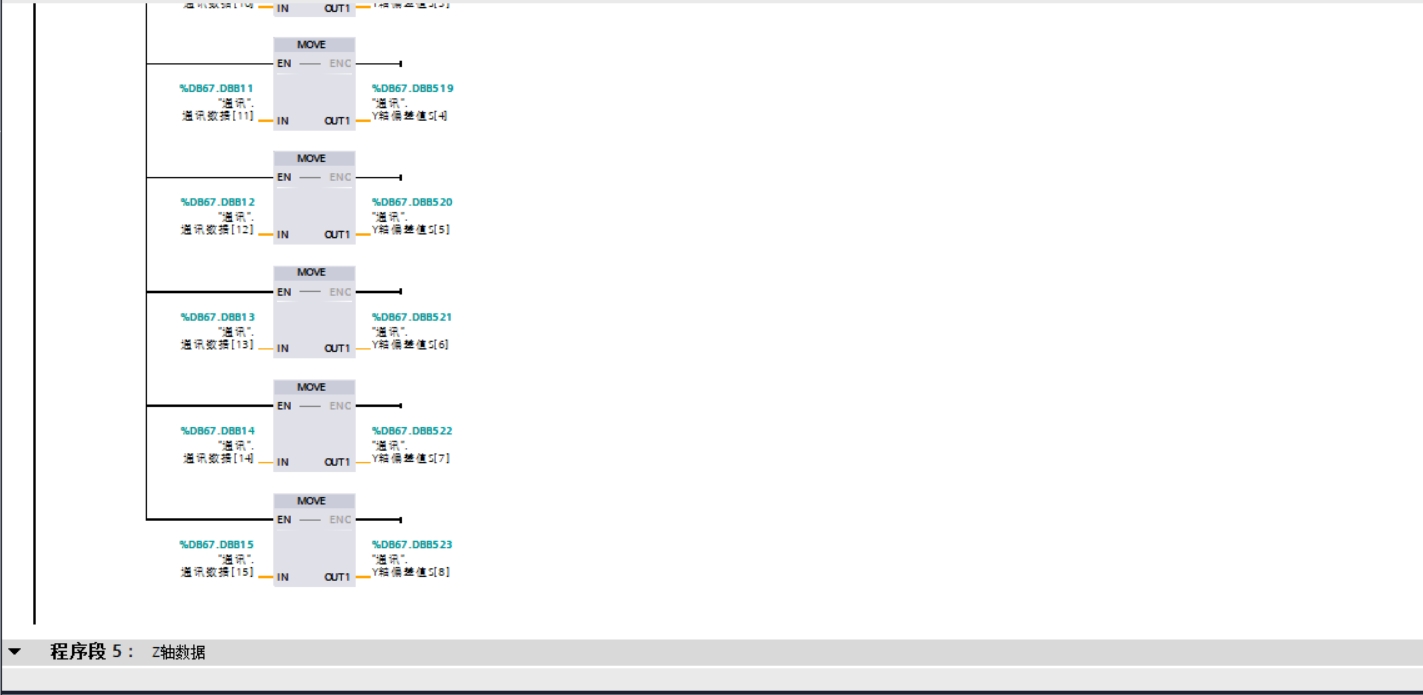
2.2 平面打胶实现方法
平面打胶是指在二维平面上进行胶水的喷涂,本节将介绍平面打胶的实现方法,包括运动路径的规划、速度控制和胶水喷涂参数的设置等。
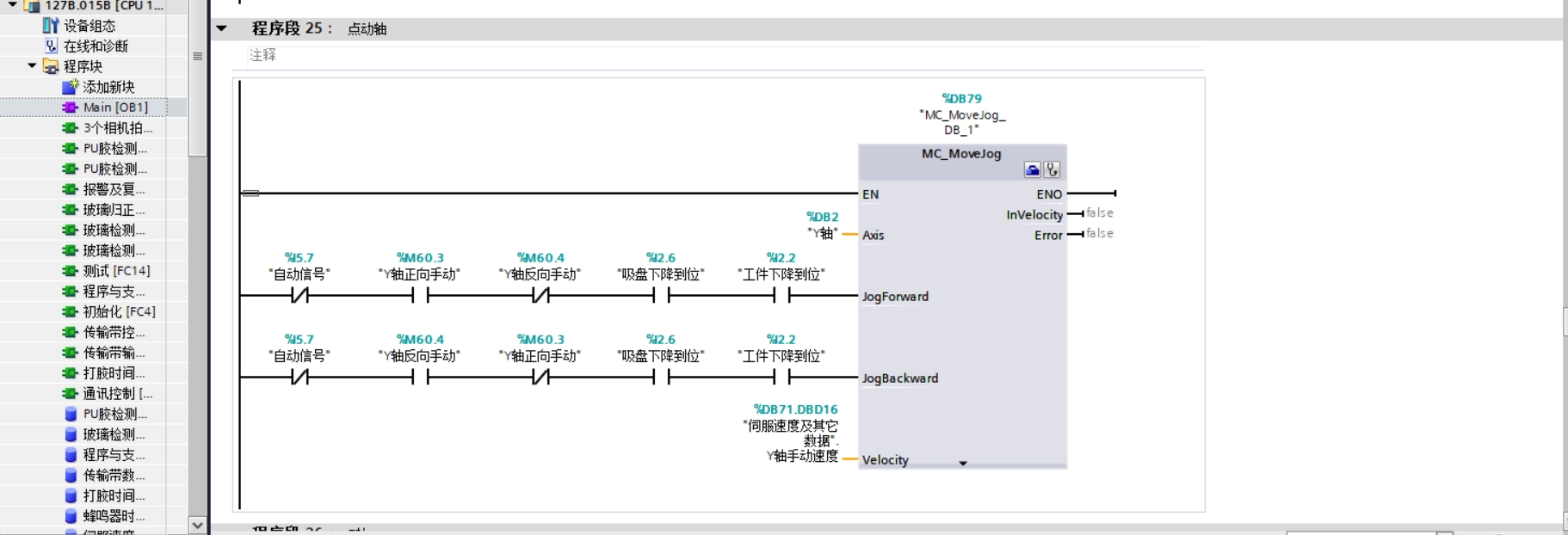
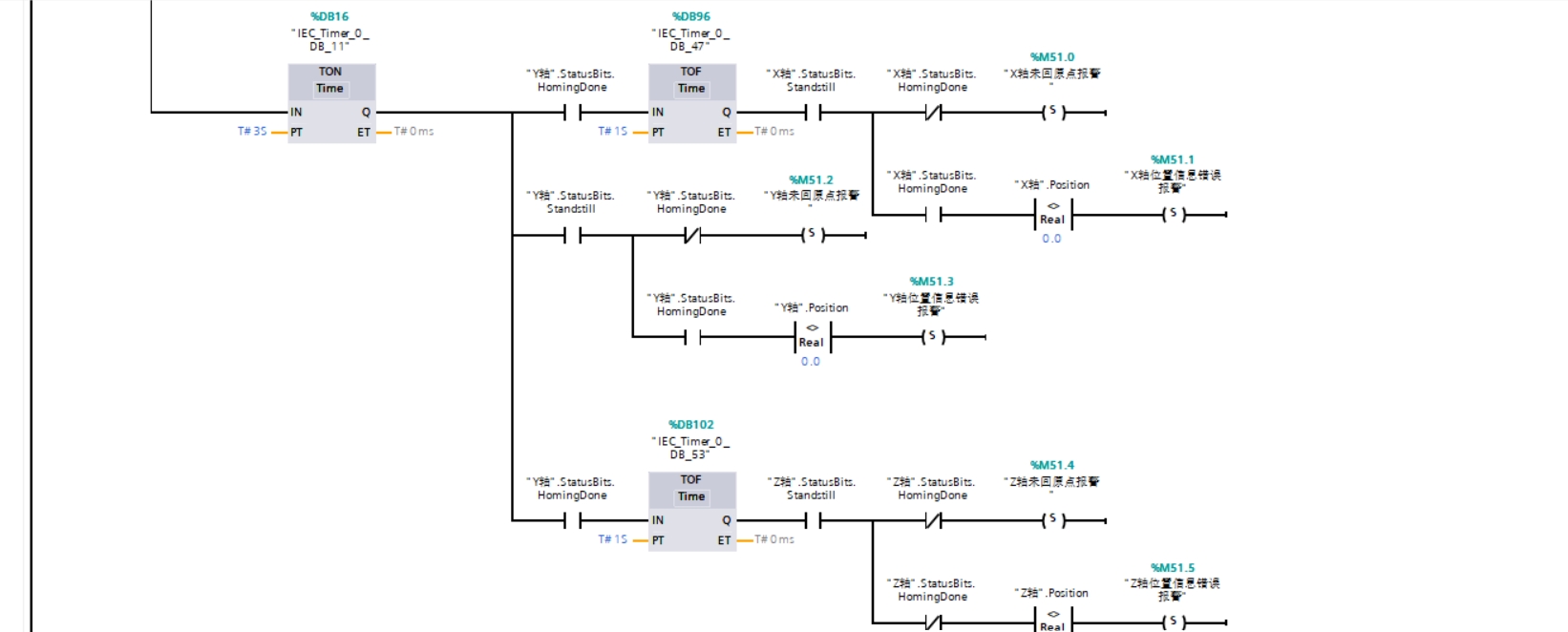
2.3 Z轴上下使能
Z轴的上下使能是指控制Z轴的上升和下降。本节将介绍Z轴上下使能的实现方法,包括信号的采集、状态切换和控制指令的发送等。
第三章 PLC与工业相机的TCP通信
3.1 TCP/IP协议概述
TCP/IP协议是互联网基础架构的核心协议之一。本节将介绍TCP/IP协议的基本原理和通信过程。
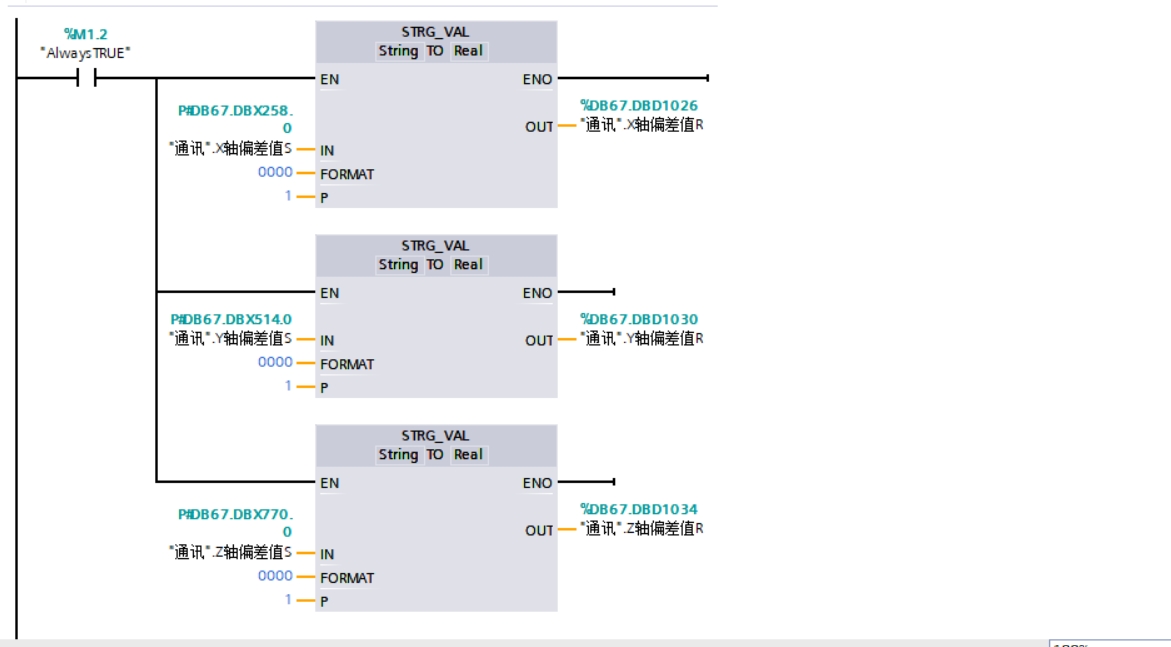
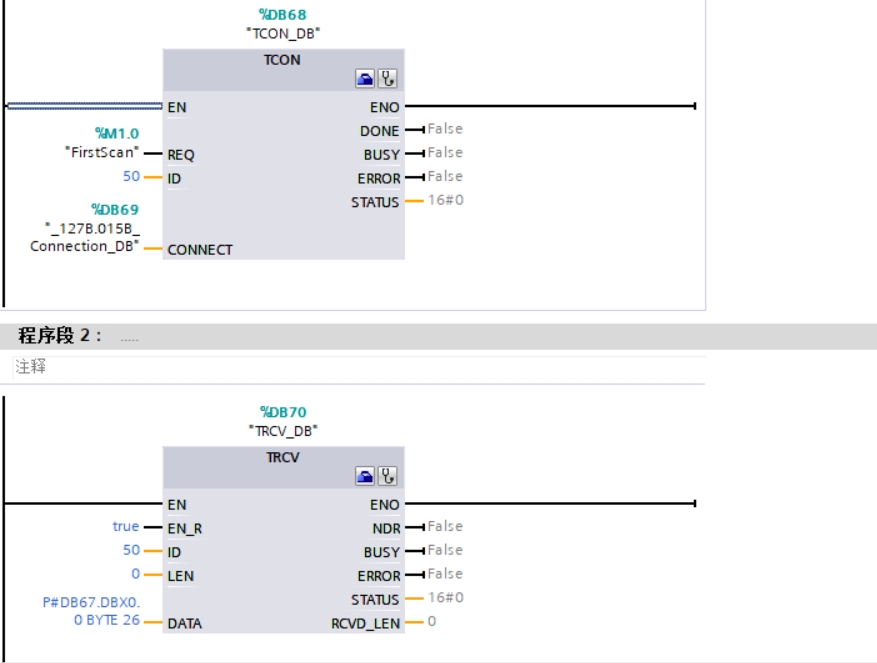
3.2 PLC与工业相机的TCP通信
PLC与工业相机的TCP通信是实现定位偏差读取的重要环节。本节将介绍PLC与工业相机之间TCP通信的建立和数据传输的实现方法。
第四章 程序优化方案
4.1 支持博图15及以上版本
博图是一款常用的图像处理软件,本节将介绍如何使西门子1200三轴打胶机程序支持博图15及以上版本,以满足不同用户的需求。
4.2 程序自带注释
注释是程序中的重要部分,可以提高代码的可读性和可维护性。本节将介绍如何在西门子1200三轴打胶机程序中添加注释,以提高程序的易读性和可维护性。
第五章 结论
本文围绕西门子1200三轴打胶机程序展开了深入分析和优化。通过对三轴运动控制定位原理、PLC与工业相机的TCP通信以及程序优化方案的介绍,读者可以更加深入地了解西门子1200三轴打胶机程序的工作原理和优化方法,以提高系统的稳定性和精准性。
参考资料:
本文所述内容仅为作者个人观点,不代表任何公司或组织立场。技术细节的准确性和有效性请参考相关技术文档和官方说明。
相关的代码,程序地址如下:http://imgcs.cn/642224677759.html

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









