






copyright (c) 2016,烟台大学计算机学院
All rights reserved.
文件名称:1.cpp
作者:孟令康
完成日期:2016年9月12日
版本号:v1.0
问题描述:定义图的邻接矩阵和邻接表存储结构,实现其基本运算,并完成测试。
要求:
1、头文件graph.h中定义相关的数据结构并声明用于完成基本运算的函数。对应基本运算的函数包括:
void ArrayToMat(int *Arr, int n, MGraph &g); //用普通数组构造图的邻接矩阵
void ArrayToList(int *Arr, int n, ALGraph *&); //用普通数组构造图的邻接表
void MatToList(MGraph g,ALGraph *&G);//将邻接矩阵g转换成邻接表G
void ListToMat(ALGraph *G,MGraph &g);//将邻接表G转换成邻接矩阵g
void DispMat(MGraph g);//输出邻接矩阵g
void DispAdj(ALGraph *G);//输出邻接表G
2、在graph.cpp中实现这些函数
3、用main.cpp中的main函数中完成测试。
输入描述: 无
程序输出: 测试数据
graph.h:
graph.cpp:
All rights reserved.
文件名称:1.cpp
作者:孟令康
完成日期:2016年9月12日
版本号:v1.0
问题描述:定义图的邻接矩阵和邻接表存储结构,实现其基本运算,并完成测试。
要求:
1、头文件graph.h中定义相关的数据结构并声明用于完成基本运算的函数。对应基本运算的函数包括:
void ArrayToMat(int *Arr, int n, MGraph &g); //用普通数组构造图的邻接矩阵
void ArrayToList(int *Arr, int n, ALGraph *&); //用普通数组构造图的邻接表
void MatToList(MGraph g,ALGraph *&G);//将邻接矩阵g转换成邻接表G
void ListToMat(ALGraph *G,MGraph &g);//将邻接表G转换成邻接矩阵g
void DispMat(MGraph g);//输出邻接矩阵g
void DispAdj(ALGraph *G);//输出邻接表G
2、在graph.cpp中实现这些函数
3、用main.cpp中的main函数中完成测试。
输入描述: 无
程序输出: 测试数据
代码
main.cpp:
#include <stdio.h>
#include "graph.h"
int main()
{
MGraph g1,g2;
ALGraph *G1,*G2;
int A[6][6]=
{
{0,5,0,7,0,0},
{0,0,4,0,0,0},
{8,0,0,0,0,9},
{0,0,5,0,0,6},
{0,0,0,5,0,0},
{3,0,0,0,1,0}
};
ArrayToMat(A[0], 6, g1); //取二维数组的起始地址作实参,用A[0],因其实质为一维数组地址,与形参匹配
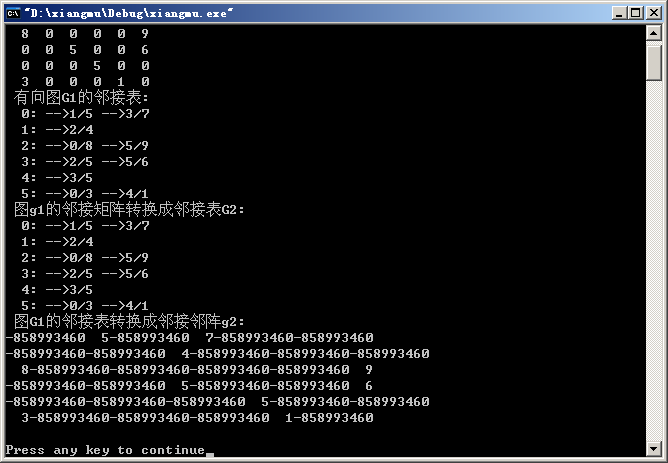
printf(" 有向图g1的邻接矩阵:\n");
DispMat(g1);
ArrayToList(A[0], 6, G1);
printf(" 有向图G1的邻接表:\n");
DispAdj(G1);
MatToList(g1,G2);
printf(" 图g1的邻接矩阵转换成邻接表G2:\n");
DispAdj(G2);
ListToMat(G1,g2);
printf(" 图G1的邻接表转换成邻接邻阵g2:\n");
DispMat(g2);
printf("\n");
return 0;
} graph.h:
#ifndef GRAPH_H_INCLUDED
#define GRAPH_H_INCLUDED
#include <stdio.h>
#include <malloc.h>
#define MAXV 100 //最大顶点个数
#define INF 32767 //INF表示∞
typedef int InfoType;
//以下定义邻接矩阵类型
typedef struct
{
int no; //顶点编号
InfoType info; //顶点其他信息,在此存放带权图权值
} VertexType; //顶点类型
typedef struct //图的定义
{
int edges[MAXV][MAXV]; //邻接矩阵
int n,e; //顶点数,弧数
VertexType vexs[MAXV]; //存放顶点信息
} MGraph; //图的邻接矩阵类型
//以下定义邻接表类型
typedef struct ANode //弧的结点结构类型
{
int adjvex; //该弧的终点位置
struct ANode *nextarc; //指向下一条弧的指针
InfoType info; //该弧的相关信息,这里用于存放权值
} ArcNode;
typedef int Vertex;
typedef struct Vnode //邻接表头结点的类型
{
Vertex data; //顶点信息
int count; //存放顶点入度,只在拓扑排序中用
ArcNode *firstarc; //指向第一条弧
} VNode;
typedef VNode AdjList[MAXV]; //AdjList是邻接表类型
typedef struct
{
AdjList adjlist; //邻接表
int n,e; //图中顶点数n和边数e
} ALGraph; //图的邻接表类型
//功能:由一个反映图中顶点邻接关系的二维数组,构造出用邻接矩阵存储的图
//参数:Arr - 数组名,由于形式参数为二维数组时必须给出每行的元素个数,在此将参数Arr声明为一维数组名(指向int的指针)
// n - 矩阵的阶数
// g - 要构造出来的邻接矩阵数据结构
void ArrayToMat(int *Arr, int n, MGraph &g); //用普通数组构造图的邻接矩阵
void ArrayToList(int *Arr, int n, ALGraph *&); //用普通数组构造图的邻接表
void MatToList(MGraph g,ALGraph *&G);//将邻接矩阵g转换成邻接表G
void ListToMat(ALGraph *G,MGraph &g);//将邻接表G转换成邻接矩阵g
void DispMat(MGraph g);//输出邻接矩阵g
void DispAdj(ALGraph *G);//输出邻接表G
#endif // GRAPH_H_INCLUDED graph.cpp:
#include <stdio.h>
#include "graph.h"
//功能:由一个反映图中顶点邻接关系的二维数组,构造出用邻接矩阵存储的图
//参数:Arr - 数组名,由于形式参数为二维数组时必须给出每行的元素个数,在此将参数Arr声明为一维数组名(指向int的指针)
// n - 矩阵的阶数
// g - 要构造出来的邻接矩阵数据结构
void ArrayToMat(int *Arr, int n, MGraph &g)
{
int i,j,count=0; //count用于统计边数,即矩阵中非0元素个数
g.n=n;
for (i=0; i<g.n; i++)
for (j=0; j<g.n; j++)
{
g.edges[i][j]=Arr[i*n+j]; //将Arr看作n×n的二维数组,Arr[i*n+j]即是Arr[i][j],计算存储位置的功夫在此应用
if(g.edges[i][j]!=0)
count++;
}
g.e=count;
}
void ArrayToList(int *Arr, int n, ALGraph *&G)
{
int i,j,count=0; //count用于统计边数,即矩阵中非0元素个数
ArcNode *p;
G=(ALGraph *)malloc(sizeof(ALGraph));
G->n=n;
for (i=0; i<n; i++) //给邻接表中所有头节点的指针域置初值
G->adjlist[i].firstarc=NULL;
for (i=0; i<n; i++) //检查邻接矩阵中每个元素
for (j=n-1; j>=0; j--)
if (Arr[i*n+j]!=0) //存在一条边,将Arr看作n×n的二维数组,Arr[i*n+j]即是Arr[i][j]
{
p=(ArcNode *)malloc(sizeof(ArcNode)); //创建一个节点*p
p->adjvex=j;
p->info=Arr[i*n+j];
p->nextarc=G->adjlist[i].firstarc; //采用头插法插入*p
G->adjlist[i].firstarc=p;
}
G->e=count;
}
void MatToList(MGraph g, ALGraph *&G)
//将邻接矩阵g转换成邻接表G
{
int i,j;
ArcNode *p;
G=(ALGraph *)malloc(sizeof(ALGraph));
for (i=0; i<g.n; i++) //给邻接表中所有头节点的指针域置初值
G->adjlist[i].firstarc=NULL;
for (i=0; i<g.n; i++) //检查邻接矩阵中每个元素
for (j=g.n-1; j>=0; j--)
if (g.edges[i][j]!=0) //存在一条边
{
p=(ArcNode *)malloc(sizeof(ArcNode)); //创建一个节点*p
p->adjvex=j;
p->info=g.edges[i][j];
p->nextarc=G->adjlist[i].firstarc; //采用头插法插入*p
G->adjlist[i].firstarc=p;
}
G->n=g.n;
G->e=g.e;
}
void ListToMat(ALGraph *G,MGraph &g)
//将邻接表G转换成邻接矩阵g
{
int i,j;
ArcNode *p;
for (i=0; i<g.n; i++) //先初始化邻接矩阵
for (j=0; j<g.n; j++)
g.edges[i][j]=0;
for (i=0; i<G->n; i++) //根据邻接表,为邻接矩阵赋值
{
p=G->adjlist[i].firstarc;
while (p!=NULL)
{
g.edges[i][p->adjvex]=p->info;
p=p->nextarc;
}
}
g.n=G->n;
g.e=G->e;
}
void DispMat(MGraph g)
//输出邻接矩阵g
{
int i,j;
for (i=0; i<g.n; i++)
{
for (j=0; j<g.n; j++)
if (g.edges[i][j]==INF)
printf("%3s","∞");
else
printf("%3d",g.edges[i][j]);
printf("\n");
}
}
void DispAdj(ALGraph *G)
//输出邻接表G
{
int i;
ArcNode *p;
for (i=0; i<G->n; i++)
{
p=G->adjlist[i].firstarc;
printf("%3d: ",i);
while (p!=NULL)
{
printf("-->%d/%d ",p->adjvex,p->info);
p=p->nextarc;
}
printf("\n");
}
}
知识点总结:
图基本算法库。
学习心得:
图算法库在生活中非常实用。















 394
394

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









