







指示灯检测是数据中心机房巡检过程中的重要一环,然而由于机柜网格遮挡,机房巡检机器人在对指示灯数据进行传统单目检测时,会存在部分有效信息无法被模型检测出来,进而导致目标丢失的问题。针对这种网格遮挡问题,蒙帕研发团队采用双目方式进行检测互补,弥补单目方式不足。
双目检测算法流程
双目检测原理
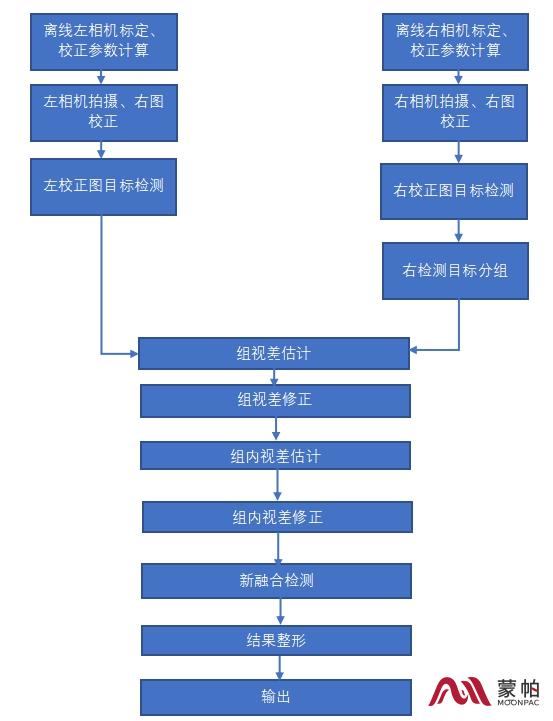
双目检测先要对左、右立体相机进行立体标定,生成校正参数文件。当左、右相机实际采图时,图像先根据校正文件进行校正,然后对左、右图像分别进行检测。
为提升初始估计鲁棒性,将右图检测结果按行进行分组,再根据左图检测结果对每组进行初始视差估计。对只有1个检测结果的组,认为其视差估计是不可靠的,根据阈值输出的视差可能不止1个。之后需对组视差进行修正,将每组不可靠的视差剔除,只保留最可靠的视差。
接下来对每组内每个目标的视差要根据其本身位置,组视差,搜索范围进一步计算。每次组内所有检测视差计算出来后都要进行组内视差修正。超过变化阈值的视差会被标记出来,再一次缩小其搜索范围计算,循环直到满足条件跳出。
最后右图每个检测目标根据其最终视差映射到左图相关区域,如果左图检测到此区域则忽略,反之则将右图目标区域融合到左图。所有目标处理后,形成新融合图像,
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









