







1. 深度优先遍历(Depth-First Traversal)
2.1 图的深度优先遍历的递归定义
假设给定图G的初态是所有顶点均未曾访问过。在G中任选一顶点v为初始出发点(源点),则深度优先遍历可定义如下:首先访问出发点v,并将其标记为已访问过;然后依次从v出发搜索v的每个邻接点w。若w未曾访问过,则以w为新的出发点继续进行深度优先遍历,直至图中所有和源点v有路径相通的顶点(亦称为从源点可达的顶点)均已被访问为止。若此时图中仍有未访问的顶点,则另选一个尚未访问的顶点作为新的源点重复上述过程,直至图中所有顶点均已被访问为止。
图的深度优先遍历类似于树的前序遍历。采用的搜索方法的特点是尽可能先对纵深方向进行搜索。这种搜索方法称为深度优先搜索(Depth-First Search)。相应地,用此方法遍历图就很自然地称之为图的深度优先遍历。
1.2 深度优先搜索的过程
设x是当前被访问顶点,在对x做过访问标记后,选择一条从x出发的未检测过的边(x,y)。若发现顶点y已访问过,则重新选择另一条从x出发的未检测过的边,否则沿边(x,y)到达未曾访问过的y,对y访问并将其标记为已访问过;然后从y开始搜索,直到搜索完从y出发的所有路径,即访问完所有从y出发可达的顶点之后,才回溯到顶点x,并且再选择一条从x出发的未检测过的边。上述过程直至从x出发的所有边都已检测过为止。此时,若x不是源点,则回溯到在x之前被访问过的顶点;否则图中所有和源点有路径相通的顶点(即从源点可达的所有顶点)都已被访问过,若图G是连通图,则遍历过程结束,否则继续选择一个尚未被访问的顶点作为新源点,进行新的搜索过程。
2. 图路径搜索实际问题
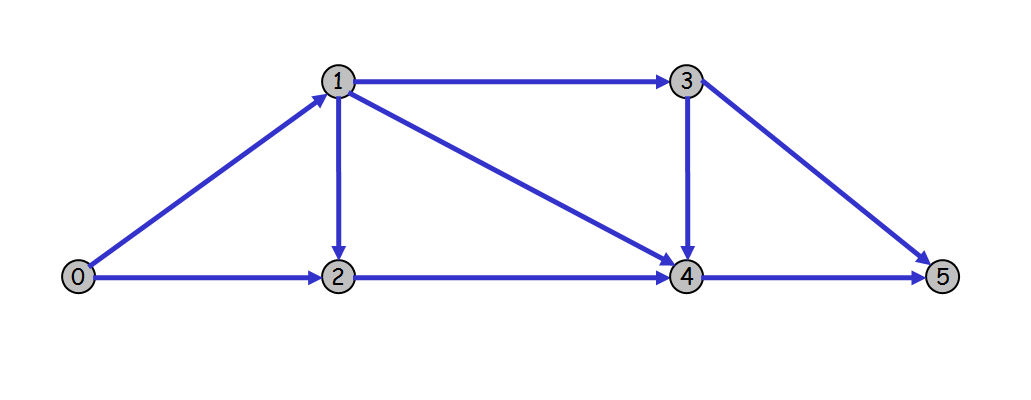
求下图中节点0到节点5的所有路径:
2.1 求解过程
第一步:建立相邻节点存储表,节点0与节点1和2;节点1与节点2、3和4;节点2与节点4;节点3与节点4和5;节点4与节点5;
第二步建立空栈,将其实节点0压人栈中;
1、 我们建立一个存储结点的栈结构,将起点0入栈,将结点0标记为入栈状态;
2、 从结点0出发,找到结点3的第一个非入栈状态的邻结点2,将结点2标记为入栈状态;
3、 从结点2出发,找到结点2的第一个非入栈状态的邻结点4,将结点4标记为入栈状态;
4、 从结点4出发,找到结点4的第一个非入栈状态的邻结点5,将结点5标记为入栈状态;
5、 栈顶结点5是终点,那么,我们就找到了一条起点到终点的路径,输出这条路径;
6、 从栈顶弹出结点5,将5标记为非入栈状态;
7、 现在栈顶结点为5,结点5没有除终点外的非入栈状态的结点,所以从栈顶将结点5弹出;
8、现在栈顶结点为4,结点4除了刚出栈的结点5之外,没有非入栈状态的相邻结点,那么我们将结点4出栈;
9、现在栈顶为结点2,结点2除了刚出栈的结点4之外,没有非入栈状态的相邻结点,那么我们将结点2出栈;
10、现在栈顶结点为0,从节点0出发,找到结点0的第一个非入栈状态的邻结点1,将结点1标记为入栈状态;一直查找到终点节点5。
11、重复步骤7-11,就可以找到从起点3到终点6的所有路径;
12、栈为空,算法结束。求解详细代码如下:
#include <iostream>
#include <map>
using namespace std;
class node
{
public:
int number;
node *next;
node(int a,node *b)
{
number=a;
next=b;
}
};
class stacks
{
public:
node * top;
stacks(node * a=NULL)
{
top=NULL;
}
void push(int a)
{
if (top==NULL)
top =new node(a,NULL);
else top=new node(a,top);
}
void pop()
{
node *b=top;
top=top->next;
delete b;
}
}; //保存已加入路径结点的栈
node* neighbour(int a);// ,int b
int cur_node;//当前结点,即为栈顶的结点
int next_node=8 ;//当前结点的下一个邻接点,即刚从栈顶弹出的结点,初始化为8
map<int,int> map_next;//每个结点的下一个邻接点,即刚从栈顶弹出的结点
int start=0;
int end=5;//起点为3,终点为6
stacks aray[6]={stacks(NULL),stacks(NULL),stacks(NULL),stacks(NULL),stacks(NULL),stacks(NULL)};
stacks stack(NULL);
int states[6];//保存结点状态的数组
int main()
{
//初始化map_next
for(int i=0;i<=5;i++)
{
map_next[i] = -1;
}
//初始化节点邻接表的信息
aray[0].push(1);aray[0].push(2);
aray[1].push(2);aray[1].push(3);aray[1].push(4);
aray[2].push(4);
aray[3].push(4); aray[3].push(5);
aray[4].push(5);
stack.push(start);//将起点入栈
states[start]=1;//将起点标记为入栈状态
node* tempnode=neighbour(3);
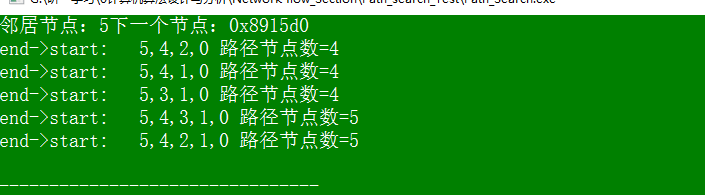
cout<<"邻居节点:"<<tempnode->number<<"下一个节点:" <<tempnode->next <<endl;
int path[6];int len=0;
while(NULL != stack.top) {//栈不为空
if (stack.top->number==end){
cout<<"end->start: ";
node* abc=stack.top;
int i;
i=0;
while(abc->number != start){
cout<<abc->number<<",";
path[i++]=abc->number;
abc=abc->next;
}
len=i+1;
cout<<start <<" "<<"路径节点数="<<len<<endl;
//cout << "start"<<endl;//输出已找到的路径
stack.pop();//将栈顶结点弹出
states[end]=0;//清除终点的状态
map_next[end]=-1;
}
else{
cur_node=stack.top->number;
if(neighbour(cur_node) != NULL){//邻居不为空
node *d =neighbour(cur_node);
map_next[cur_node] = d->number;
cur_node=d->number;
stack.push(cur_node);
states[cur_node]=1;
}
else{
stack.pop();
states[cur_node]=0;//删除的栈顶节点states置为0 通过该节点到不了目的地
map_next[cur_node] = -1;
}
}
}
return 0;
}
node* neighbour(int a){//,int b
node *abc=aray[a].top;
while ((NULL!=abc)){//结点abc不空
if( states[abc->number]==1 )//邻居节点已经在栈stack里了
{
abc=abc->next;//所有的邻居节点初始化成一个栈了,继续找下一个邻居节点
}
else//不在栈stack里
{
if(-1 == map_next[a])//就要abc作为返回值 如果a是最栈顶节点
{
while(NULL!=abc && states[abc->number]==1)
{
abc = abc->next;
}
return abc;
}
else if(abc->number == map_next[a]) //判断当前节点是否是a节点的邻居节点
{
abc=abc->next;
while(NULL!=abc && states[abc->number]==1)
{
abc = abc->next;
}
return abc; //将abc的下一个结点返回
}
else
{
abc=abc->next;
}
}
}
return NULL;
}程序运行结果如下;















 10万+
10万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









