







<span style="font-size:18px;">#
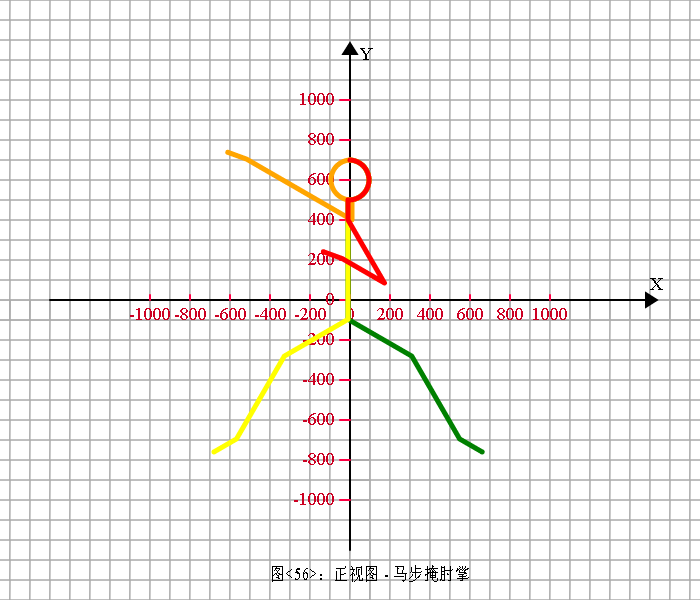
#<57>马步掩肘掌
#旋转, 左肢角度取正值,右肢脚度取负值
neckRot = 90; #往左斜从90度减角,往右加角
LA = [-120, 0, 10];
RA =[30, -150, 10] ;
LL = [60, -30, 30];
RL = [-60, 30, -30];
lBigArm = LA[0]; #取值范围 20 -> 160
lSmallArm = LA[1];
lHalm = LA[2];
rBigArm = RA[0]; #取值范围 -20 -> -160
rSmallArm = RA[1];
rHalm = RA[2];
lBigLeg = LL[0]; #取值范围 -10 -> -120
lSmallLeg = LL[1];
lFoot = LL[2];
rBigLeg = RL[0]; #取值范围 10 -> 120
rSmallLeg = RL[1];
rFoot = RL[2];
upBodyCurveRate = 0; #左侧视取正,右侧视取负
neckEndAngle = -90 / 180 * math.pi;
midBodyAngle = -90 / 180 * math.pi;
#长度投影系数
proj_lBigArm = 1 * cos_(0);
proj_lSmallArm = 1 * cos_(0);
proj_lHalm = 1 * cos_(0);
proj_rBigArm = 1 * cos_(0);
proj_rSmallArm = 1 * cos_(0);
proj_rHalm = 1 * cos_(0);
proj_lBigLeg = 1 * cos_(30);
proj_lSmallLeg = 1 * cos_(0);
proj_lFoot = 1 * cos_(30);
proj_rBigLeg = 1 * cos_(30);
proj_rSmallLeg = 1 * cos_(0);
proj_rFoot = 1 * cos_(30);
#</span>
<span style="font-size:18px;">#
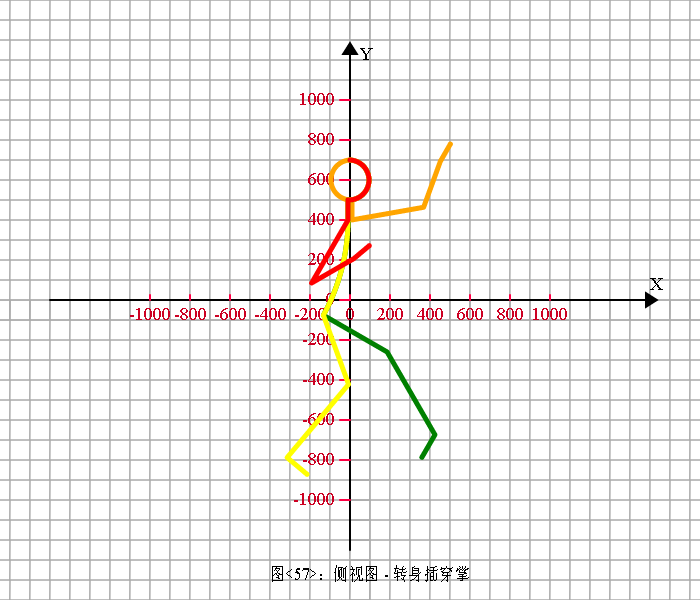
#<58>转身插穿掌
#旋转, 左肢角度取正值,右肢脚度取负值
neckRot = 90; #往左斜从90度减角,往右加角
LA = [100, 60, -10];
RA =[-30, 150, 10] ;
LL = [60, -30, -60];
RL = [20, -60, 90];
lBigArm = LA[0]; #取值范围 20 -> 160
lSmallArm = LA[1];
lHalm = LA[2];
rBigArm = RA[0]; #取值范围 -20 -> -160
rSmallArm = RA[1];
rHalm = RA[2];
lBigLeg = LL[0]; #取值范围 -10 -> -120
lSmallLeg = LL[1];
lFoot = LL[2];
rBigLeg = RL[0]; #取值范围 10 -> 120
rSmallLeg = RL[1];
rFoot = RL[2];
upBodyCurveRate = -1/1000; #左侧视取正,右侧视取负
neckEndAngle = -90 / 180 * math.pi;
midBodyAngle = -90 / 180 * math.pi;
#长度投影系数
proj_lBigArm = 1 * cos_(0);
proj_lSmallArm = 1 * cos_(0);
proj_lHalm = 1 * cos_(0);
proj_rBigArm = 1 * cos_(0);
proj_rSmallArm = 1 * cos_(0);
proj_rHalm = 1 * cos_(0);
proj_lBigLeg = 1 * cos_(30);
proj_lSmallLeg = 1 * cos_(0);
proj_lFoot = 1 * cos_(30);
proj_rBigLeg = 1 * cos_(30);
proj_rSmallLeg = 1 * cos_(0);
proj_rFoot = 1 * cos_(30);
#</span>
<span style="font-size:18px;">#
#<59>回身探掌
#旋转, 左肢角度取正值,右肢脚度取负值
neckRot = 90; #往左斜从90度减角,往右加角
LA = [100, 60, -10];
RA =[-30, 90, 10] ;
LL = [-60, -10, 90];
RL = [80, -80, 90];
lBigArm = LA[0]; #取值范围 20 -> 160
lSmallArm = LA[1];
lHalm = LA[2];
rBigArm = RA[0]; #取值范围 -20 -> -160
rSmallArm = RA[1];
rHalm = RA[2];
lBigLeg = LL[0]; #取值范围 -10 -> -120
lSmallLeg = LL[1];
lFoot = LL[2];
rBigLeg = RL[0]; #取值范围 10 -> 120
rSmallLeg = RL[1];
rFoot = RL[2];
upBodyCurveRate = -1/1000; #左侧视取正,右侧视取负
neckEndAngle = -90 / 180 * math.pi;
midBodyAngle = -90 / 180 * math.pi;
#长度投影系数
proj_lBigArm = 1 * cos_(0);
proj_lSmallArm = 1 * cos_(0);
proj_lHalm = 1 * cos_(0);
proj_rBigArm = 1 * cos_(0);
proj_rSmallArm = 1 * cos_(0);
proj_rHalm = 1 * cos_(0);
proj_lBigLeg = 1 * cos_(30);
proj_lSmallLeg = 1 * cos_(0);
proj_lFoot = 1 * cos_(30);
proj_rBigLeg = 1 * cos_(30);
proj_rSmallLeg = 1 * cos_(0);
proj_rFoot = 1 * cos_(30);
#</span>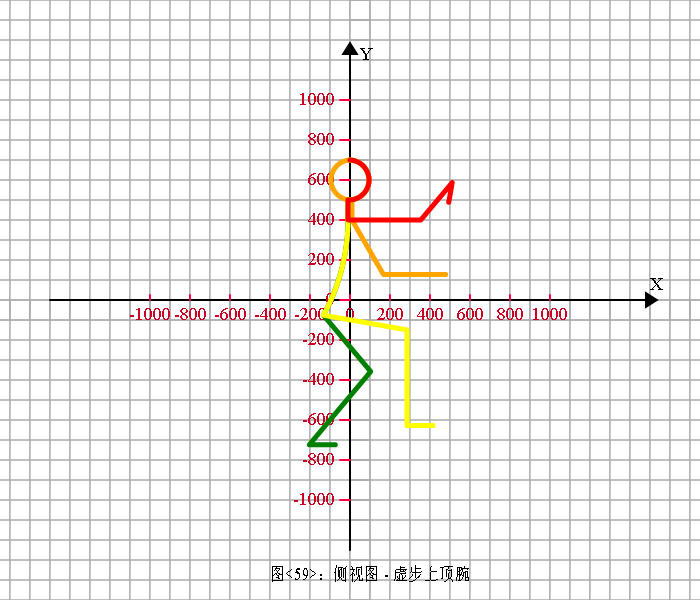
<span style="font-size:18px;">#
#<60>虚步上顶腕
#旋转, 左肢角度取正值,右肢脚度取负值
neckRot = 90; #往左斜从90度减角,往右加角
LA = [30, 60, 0];
RA =[90, 50, -150] ;
LL = [40, -80, 130];
RL = [80, -80, 90];
lBigArm = LA[0]; #取值范围 20 -> 160
lSmallArm = LA[1];
lHalm = LA[2];
rBigArm = RA[0]; #取值范围 -20 -> -160
rSmallArm = RA[1];
rHalm = RA[2];
lBigLeg = LL[0]; #取值范围 -10 -> -120
lSmallLeg = LL[1];
lFoot = LL[2];
rBigLeg = RL[0]; #取值范围 10 -> 120
rSmallLeg = RL[1];
rFoot = RL[2];
upBodyCurveRate = -1/1000; #左侧视取正,右侧视取负
neckEndAngle = -90 / 180 * math.pi;
midBodyAngle = -90 / 180 * math.pi;
#长度投影系数
proj_lBigArm = 1 * cos_(30);
proj_lSmallArm = 1 * cos_(30);
proj_lHalm = 1 * cos_(0);
proj_rBigArm = 1 * cos_(0);
proj_rSmallArm = 1 * cos_(0);
proj_rHalm = 1 * cos_(0);
proj_lBigLeg = 1 * cos_(30);
proj_lSmallLeg = 1 * cos_(0);
proj_lFoot = 1 * cos_(30);
proj_rBigLeg = 1 * cos_(0);
proj_rSmallLeg = 1 * cos_(0);
proj_rFoot = 1 * cos_(30);
#</span>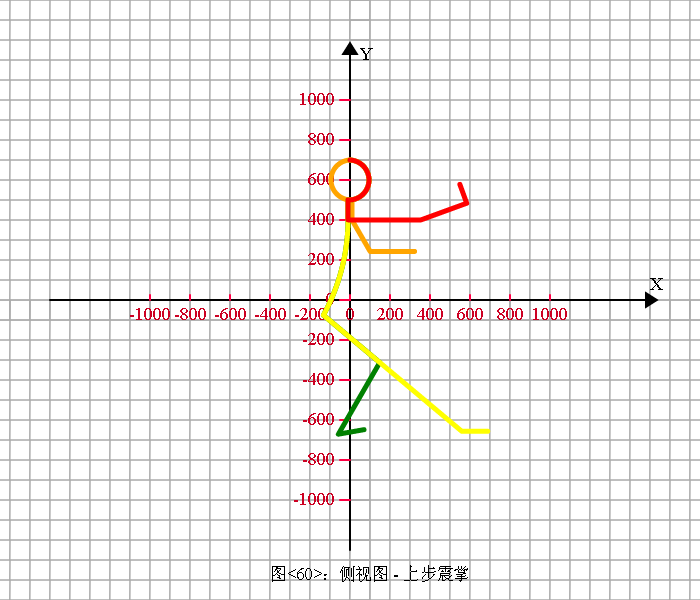
<span style="font-size:18px;">#
#<61>上步震掌
#旋转, 左肢角度取正值,右肢脚度取负值
neckRot = 90; #往左斜从90度减角,往右加角
LA = [30, 60, 0];
RA =[90, 20, 90] ;
LL = [50, -80, 130];
RL = [50, 0, 40];
lBigArm = LA[0]; #取值范围 20 -> 160
lSmallArm = LA[1];
lHalm = LA[2];
rBigArm = RA[0]; #取值范围 -20 -> -160
rSmallArm = RA[1];
rHalm = RA[2];
lBigLeg = LL[0]; #取值范围 -10 -> -120
lSmallLeg = LL[1];
lFoot = LL[2];
rBigLeg = RL[0]; #取值范围 10 -> 120
rSmallLeg = RL[1];
rFoot = RL[2];
upBodyCurveRate = -1/1000; #左侧视取正,右侧视取负
neckEndAngle = -90 / 180 * math.pi;
midBodyAngle = -90 / 180 * math.pi;
#长度投影系数
proj_lBigArm = 1 * cos_(60);
proj_lSmallArm = 1 * cos_(60);
proj_lHalm = 1 * cos_(0);
proj_rBigArm = 1 * cos_(0);
proj_rSmallArm = 1 * cos_(0);
proj_rHalm = 1 * cos_(0);
proj_lBigLeg = 1 * cos_(30);
proj_lSmallLeg = 1 * cos_(30);
proj_lFoot = 1 * cos_(30);
proj_rBigLeg = 1 * cos_(0);
proj_rSmallLeg = 1 * cos_(0);
proj_rFoot = 1 * cos_(30);
#</span>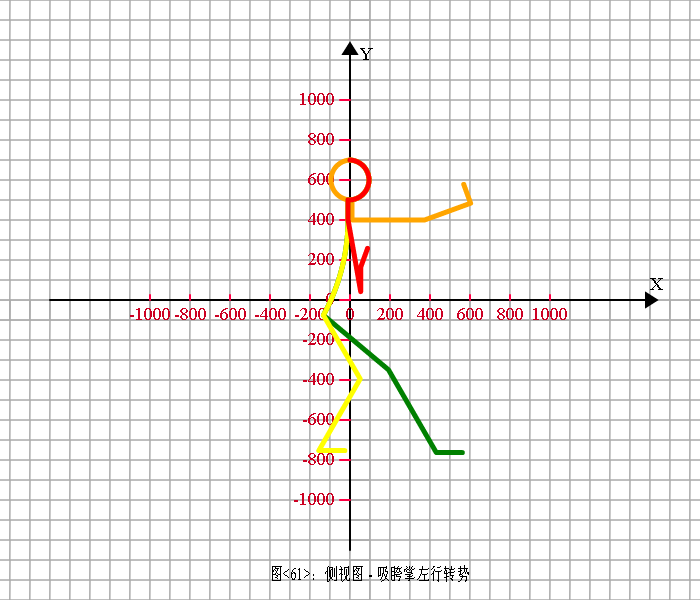
<span style="font-size:18px;">#
#<62>吸胯掌左行转势
#旋转, 左肢角度取正值,右肢脚度取负值
neckRot = 90; #往左斜从90度减角,往右加角
LA = [90, 20, 90];
RA = [10, 170, -20];
LL = [50, -20, 60];
RL = [30, -60, 120];
lBigArm = LA[0]; #取值范围 20 -> 160
lSmallArm = LA[1];
lHalm = LA[2];
rBigArm = RA[0]; #取值范围 -20 -> -160
rSmallArm = RA[1];
rHalm = RA[2];
lBigLeg = LL[0]; #取值范围 -10 -> -120
lSmallLeg = LL[1];
lFoot = LL[2];
rBigLeg = RL[0]; #取值范围 10 -> 120
rSmallLeg = RL[1];
rFoot = RL[2];
upBodyCurveRate = -1/1000; #左侧视取正,右侧视取负
neckEndAngle = -90 / 180 * math.pi;
midBodyAngle = -90 / 180 * math.pi;
#长度投影系数
proj_lBigArm = 1 * cos_(0);
proj_lSmallArm = 1 * cos_(0);
proj_lHalm = 1 * cos_(0);
proj_rBigArm = 1 * cos_(0);
proj_rSmallArm = 1 * cos_(60);
proj_rHalm = 1 * cos_(0);
proj_lBigLeg = 1 * cos_(0);
proj_lSmallLeg = 1 * cos_(0);
proj_lFoot = 1 * cos_(30);
proj_rBigLeg = 1 * cos_(30);
proj_rSmallLeg = 1 * cos_(30);
proj_rFoot = 1 * cos_(30);
#</span>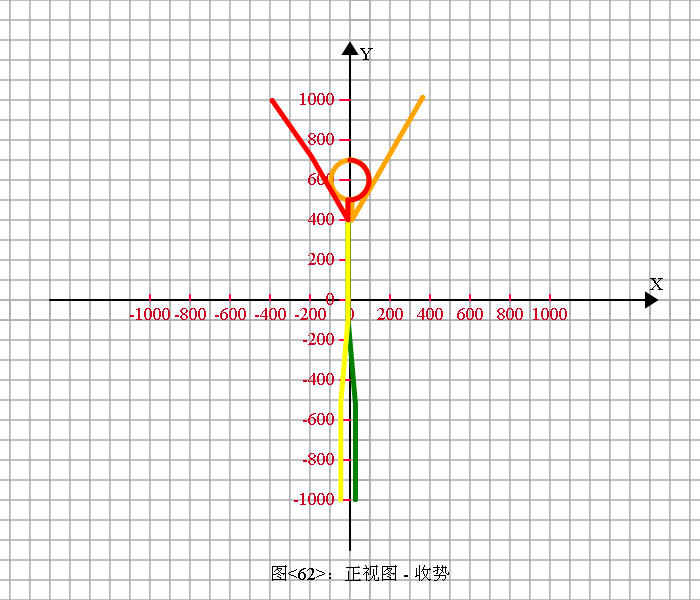
<span style="font-size:18px;">#
#<63> 收势
#旋转,所有旋转都分XY平面角度/YZ平面角度
halm_rot_1 = [0, 60];
halm_rot_2 = [0, 150];
smallArm_rot_1 = [0, 30];
smallArm_rot_2 = [0, 160];
smallArm_rot_3 = [0, 220];
bigArm_rot_1 = [0, 120];
bigArm_rot_2 = [0, 180];
foot_rot_1 = [0, 60];
root_rot_2 = [0, 30];
smallLeg_rot_1 = [0, 160]
bigLeg_rot_1 = [0, 180];
bigLeg_rot_2 = [0, 150];
bigLeg_rot_3 = [0, 90];
#旋转, 左肢角度取正值,右肢脚度取负值
neckRot = 90; #往左斜从90度减角,往右加角
LA = [150, 0, 0];
RA = [-150, 5, 0];
LL = [5, -5, 0];
RL = [-5, 5, 0];
lBigArm = LA[0]; #取值范围 20 -> 160
lSmallArm = LA[1];
lHalm = LA[2];
rBigArm = RA[0]; #取值范围 -20 -> -160
rSmallArm = RA[1];
rHalm = RA[2];
lBigLeg = LL[0]; #取值范围 -10 -> -120
lSmallLeg = LL[1];
lFoot = LL[2];
rBigLeg = RL[0]; #取值范围 10 -> 120
rSmallLeg = RL[1];
rFoot = RL[2];
upBodyCurveRate = 0;
neckEndAngle = -90 / 180 * math.pi;
midBodyAngle = -90 / 180 * math.pi;
#长度投影系数
proj_lBigArm = 1 * cos_(0);
proj_lSmallArm = 1 * cos_(0);
proj_lHalm = 1;
proj_rBigArm = 1 * cos_(0);
proj_rSmallArm = 1 * cos_(0);
proj_rHalm = 1;
proj_lBigLeg = 1 * cos_(0);
proj_lSmallLeg = 1 * cos_(0);
proj_lFoot = 1 * cos_(90);
proj_rBigLeg = 1 * cos_(0);
proj_rSmallLeg = 1 * cos_(0);
proj_rFoot = 1 * cos_(90);
#</span>
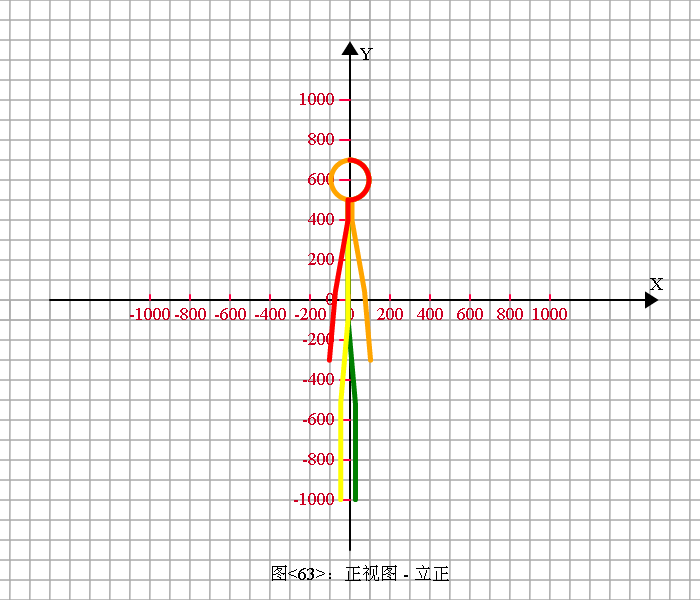
<span style="font-size:18px;">#
#<64>立正
#旋转, 左肢角度取正值,右肢脚度取负值
neckRot = 90; #往左斜从90度减角,往右加角
LA = [10, -5, 0];
RA = [-10, 5, 0];
LL = [5, -5, 0];
RL = [-5, 5, 0];
lBigArm = LA[0]; #取值范围 20 -> 160
lSmallArm = LA[1];
lHalm = LA[2];
rBigArm = RA[0]; #取值范围 -20 -> -160
rSmallArm = RA[1];
rHalm = RA[2];
lBigLeg = LL[0]; #取值范围 -10 -> -120
lSmallLeg = LL[1];
lFoot = LL[2];
rBigLeg = RL[0]; #取值范围 10 -> 120
rSmallLeg = RL[1];
rFoot = RL[2];
upBodyCurveRate = 0;
neckEndAngle = -90 / 180 * math.pi;
midBodyAngle = -90 / 180 * math.pi;
#长度投影系数
proj_lBigArm = 1 * cos_(0);
proj_lSmallArm = 1 * cos_(0);
proj_lHalm = 1;
proj_rBigArm = 1 * cos_(0);
proj_rSmallArm = 1 * cos_(0);
proj_rHalm = 1;
proj_lBigLeg = 1 * cos_(0);
proj_lSmallLeg = 1 * cos_(0);
proj_lFoot = 1 * cos_(90);
proj_rBigLeg = 1 * cos_(0);
proj_rSmallLeg = 1 * cos_(0);
proj_rFoot = 1 * cos_(90);
#</span>八卦掌心法:踩定太极图,逆时针圈行,64式一整圈,每式右转半步,左转半步,合64步计100米,故太极圈直径30米。
本节到此结束,欲知后事如何,请看下回分解。
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









