







#昆仑大仙世界传,弹腿技法奥无边。
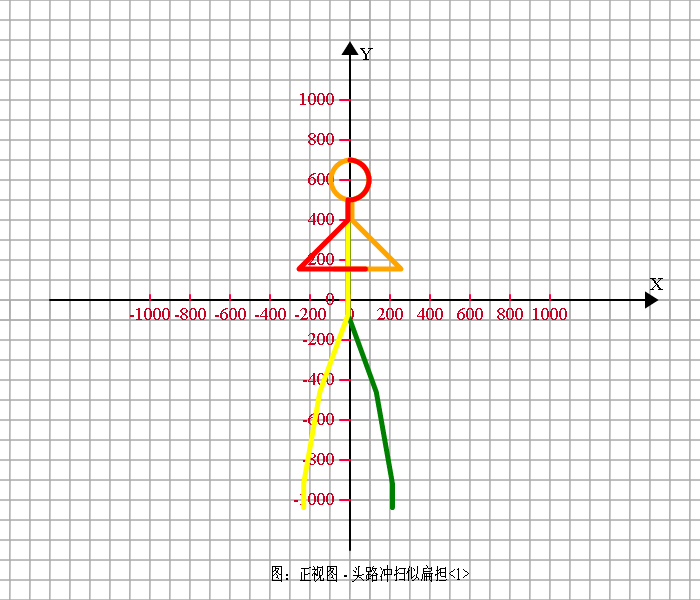
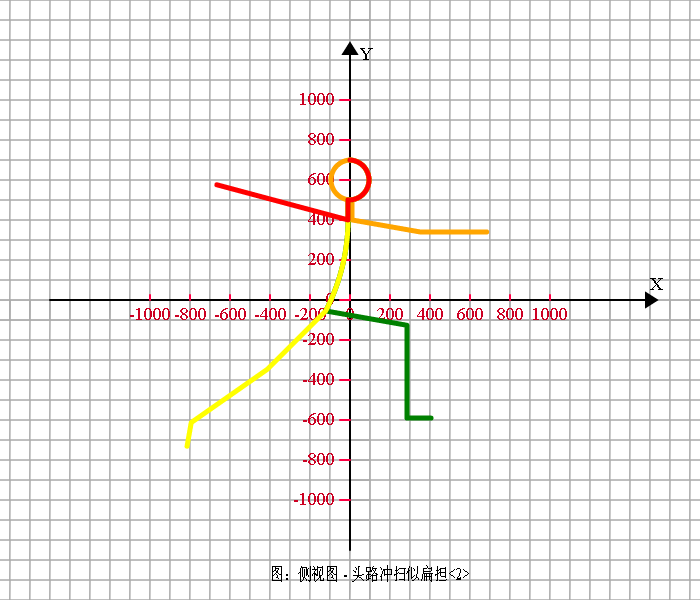
#头路冲扫似扁担,二路十字巧拉钻。
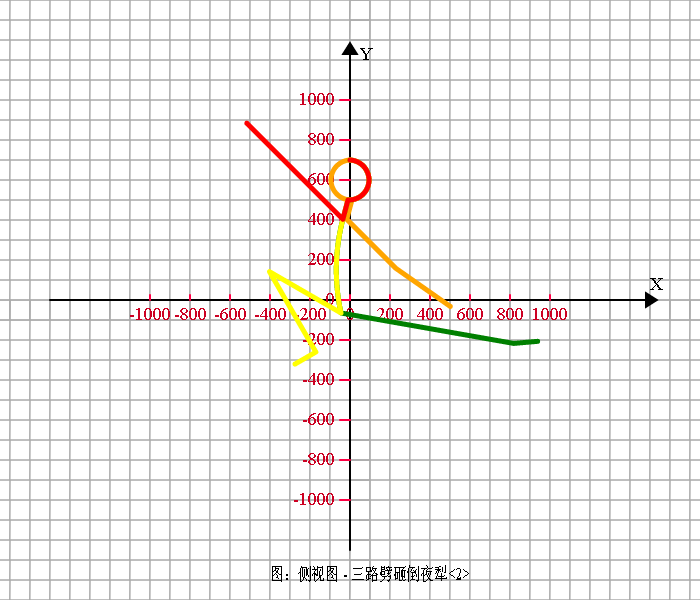
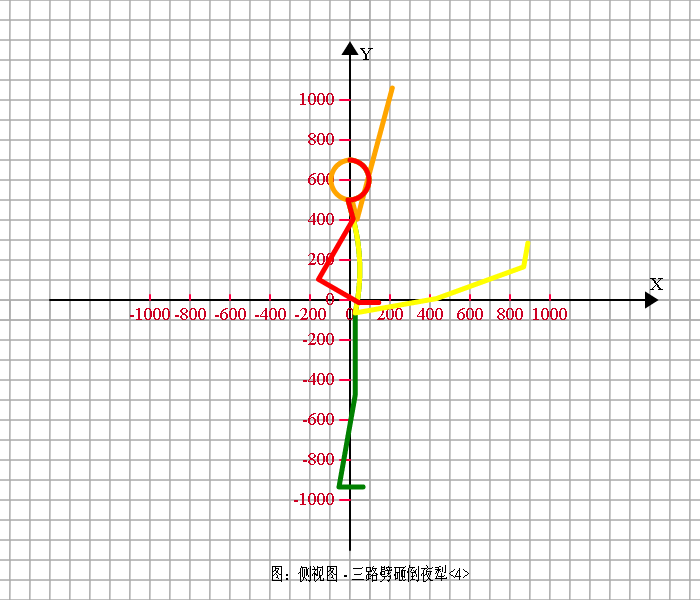
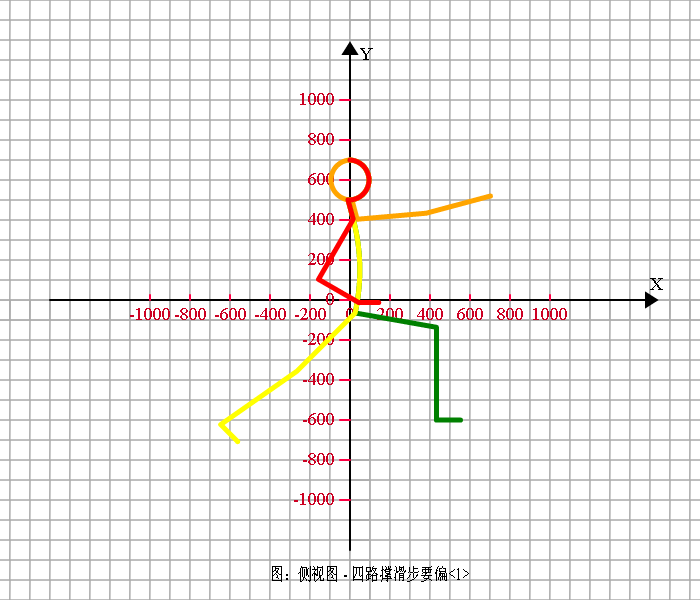
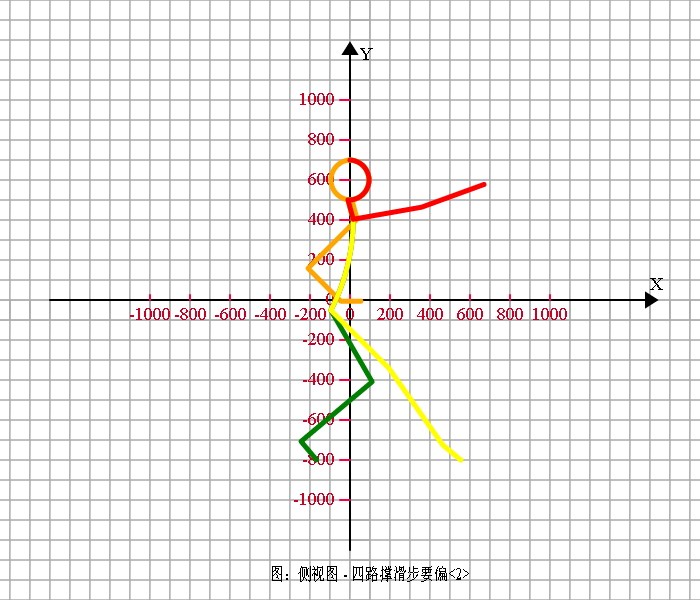
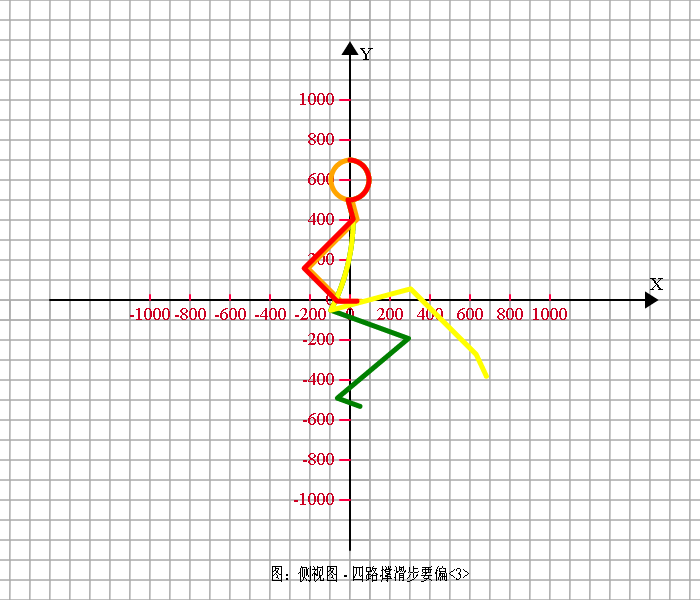
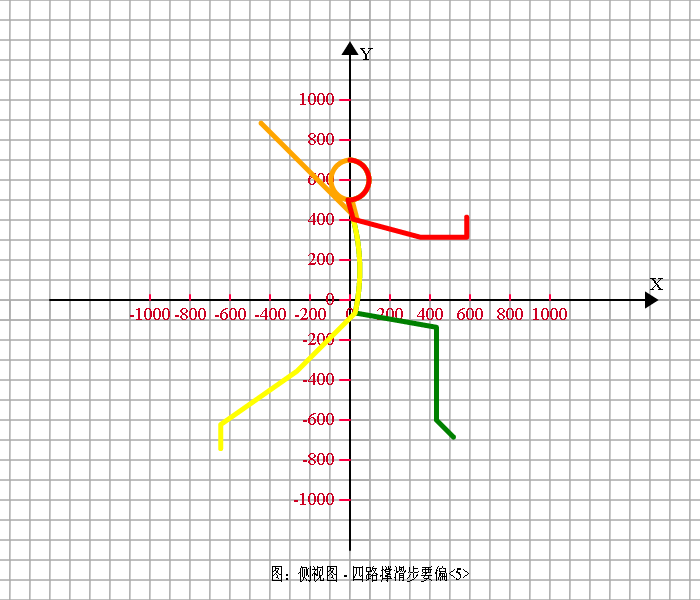
#三路劈砸倒夜犁,四路撑滑步要偏。
#五路招架等来意,六路进取左右连。
#七路劈盖七星式,八路碰锁跺转环。
#九路分中掏心腿,十路叉花如箭弹。
#世人莫笑法式单,多弹多练知根源。
<span style="font-size:18px;">#
#1-<1>
#旋转, 左肢角度取正值,右肢脚度取负值
neckRot = 90; #往左斜从90度减角,往右加角
#左侧取正值,右侧取负值
upBodyCurveRate = 0;
#负y轴为-90, 第四象限为0->-90,其余类推
neckEndAngle = -90 / 180 * math.pi;
midBodyAngle = -90 / 180 * math.pi;
LA = [45, -135, 0];
RA = [-45, 135, 0];
LL = [20, -10, -10];
RL = [-20, 10, 10];
lBigArm = LA[0]; #取值范围 20 -> 160
lSmallArm = LA[1];
lHalm = LA[2];
rBigArm = RA[0]; #取值范围 -20 -> -160
rSmallArm = RA[1];
rHalm = RA[2];
lBigLeg = LL[0]; #取值范围 -10 -> -120
lSmallLeg = LL[1];
lFoot = LL[2];
rBigLeg = RL[0]; #取值范围 10 -> 120
rSmallLeg = RL[1];
rFoot = RL[2];
#</span>
<span style="font-size:18px;">#
#1-<2>
#旋转, 左肢角度取正值,右肢脚度取负值
neckRot = 90; #往左斜从90度减角,往右加角
#左侧取正值,右侧取负值
upBodyCurveRate = -1/1000;
#负y轴为-90, 第四象限为0->-90,其余类推
neckEndAngle = -90 / 180 * math.pi;
midBodyAngle = -90 / 180 * math.pi;
LA = [80, 10, 0];
RA = [-105, 0, 0];
LL = [80, -80, 90];
RL = [-45, -10, 45];
#</span>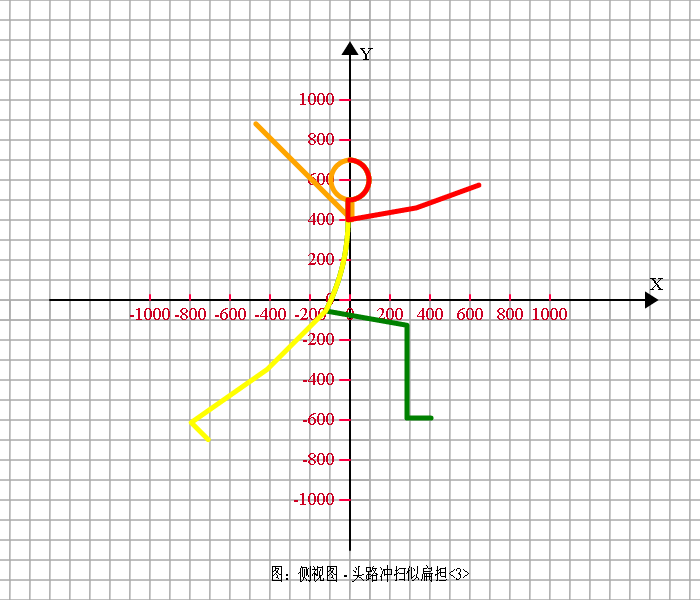
<span style="font-size:18px;">#
#1-<3>
#旋转, 左肢角度取正值,右肢脚度取负值
neckRot = 90; #往左斜从90度减角,往右加角
#左侧取正值,右侧取负值
upBodyCurveRate = -1/1000;
#负y轴为-90, 第四象限为0->-90,其余类推
neckEndAngle = -90 / 180 * math.pi;
midBodyAngle = -90 / 180 * math.pi;
LA = [-135, 0, 0] ;
RA = [100, 10, 0];
LL = [80, -80, 90];
RL = [-45, -10, 100];
#</span>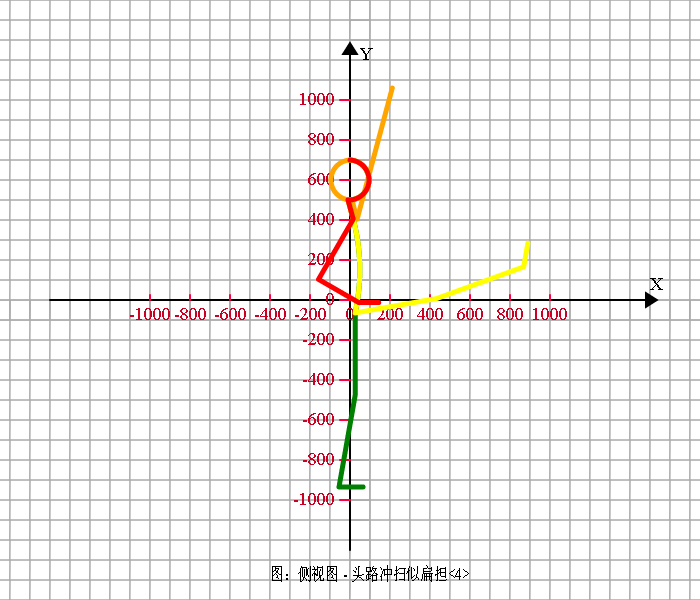
<span style="font-size:18px;">#
#1-<4>
#旋转, 左肢角度取正值,右肢脚度取负值
neckRot = 105; #往左斜从90度减角,往右加角
#左侧取正值,右侧取负值
upBodyCurveRate = -1/1000;
#负y轴为-90, 第四象限为0->-90,其余类推
neckEndAngle = -75 / 180 * math.pi;
midBodyAngle = -90 / 180 * math.pi;
LA = [150, 0, 0] ;
RA = [-45, 90, 30];
LL = [0, -10, 100];
RL = [100, 10, 60];
#</span>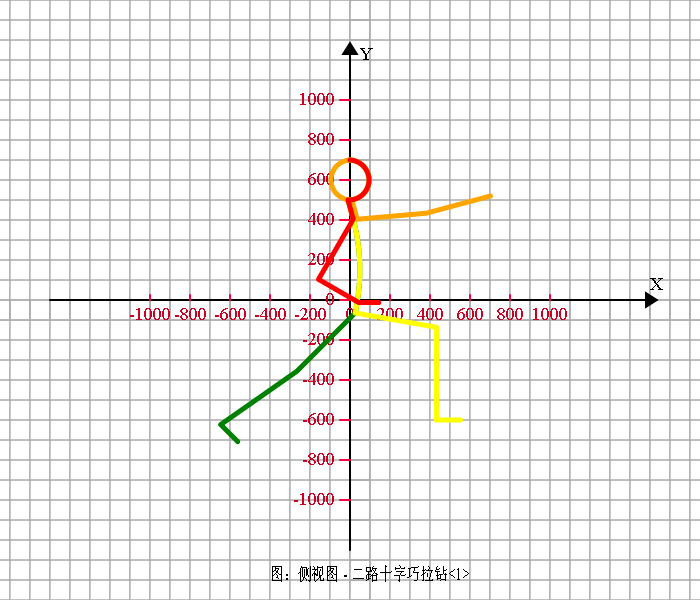
<span style="font-size:18px;">#
#2-<1>
#旋转, 左肢角度取正值,右肢脚度取负值
neckRot = 105; #往左斜从90度减角,往右加角
#左侧取正值,右侧取负值
upBodyCurveRate = -1/1000;
#负y轴为-90, 第四象限为0->-90,其余类推
neckEndAngle = -75 / 180 * math.pi;
midBodyAngle = -90 / 180 * math.pi;
LA = [80, 10, 0] ;
RA = [-45, 90, 30];
LL = [-45, -10, 100];
RL = [80, -80, 90];
#</span>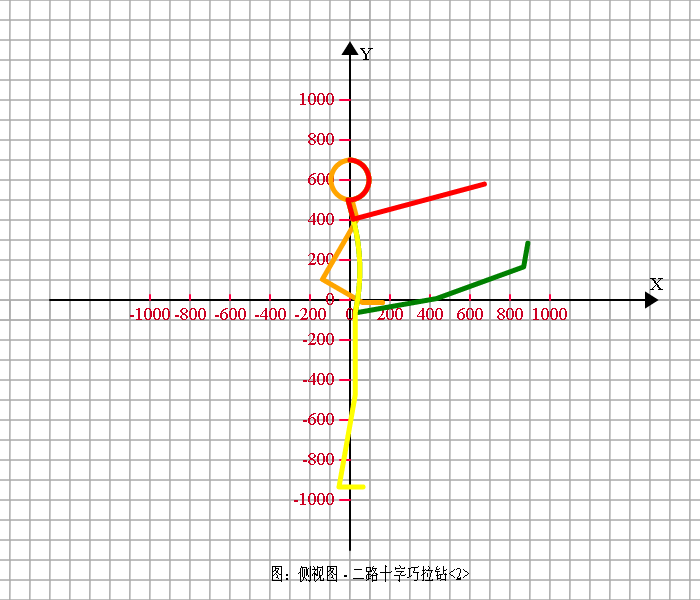
<span style="font-size:18px;">#
#2-<2>
#旋转, 左肢角度取正值,右肢脚度取负值
neckRot = 105; #往左斜从90度减角,往右加角
#左侧取正值,右侧取负值
upBodyCurveRate = -1/1000;
#负y轴为-90, 第四象限为0->-90,其余类推
neckEndAngle = -75 / 180 * math.pi;
midBodyAngle = -90 / 180 * math.pi;
LA = [90, 0, 0] ;
RA = [-45, 90, 30];
LL = [0, -10, 100];
RL = [100, 10, 60];
LA, RA = RA, LA;
LL, RL = RL, LL;
#</span>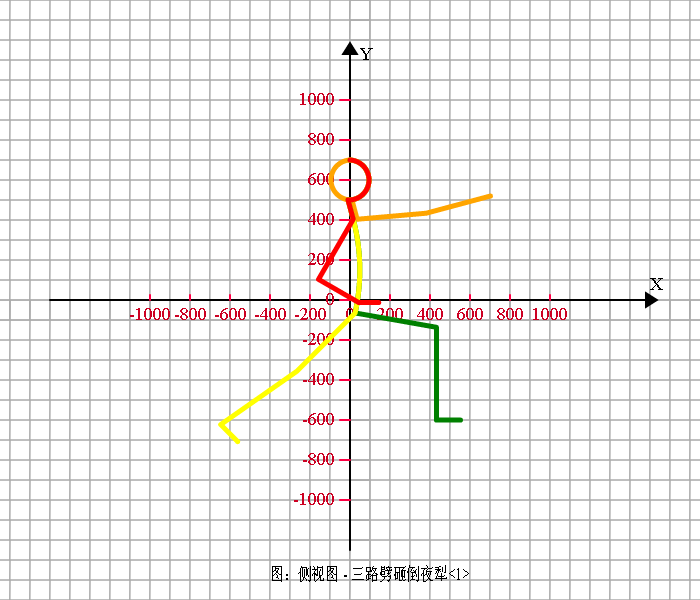
<span style="font-size:18px;">#
#3-<1>
#旋转, 左肢角度取正值,右肢脚度取负值
neckRot = 105; #往左斜从90度减角,往右加角
#左侧取正值,右侧取负值
upBodyCurveRate = -1/1000;
#负y轴为-90, 第四象限为0->-90,其余类推
neckEndAngle = -75 / 180 * math.pi;
midBodyAngle = -90 / 180 * math.pi;
LA = [80, 10, 0] ;
RA = [-45, 90, 30];
LL = [-45, -10, 100];
RL = [80, -80, 90];
LL, RL = RL, LL;
#</span>
<span style="font-size:18px;">#
#3-<2>
#旋转, 左肢角度取正值,右肢脚度取负值
neckRot = 75; #往左斜从90度减角,往右加角
#左侧取正值,右侧取负值
upBodyCurveRate = 1/1000;
#负y轴为-90, 第四象限为0->-90,其余类推
neckEndAngle = -105 / 180 * math.pi;
midBodyAngle = -90 / 180 * math.pi;
LA = [60, 10, 0] ;
RA = [-120, 0, 0];
LL = [80, 0, 15];
RL = [-120, 150, -90];
#</span>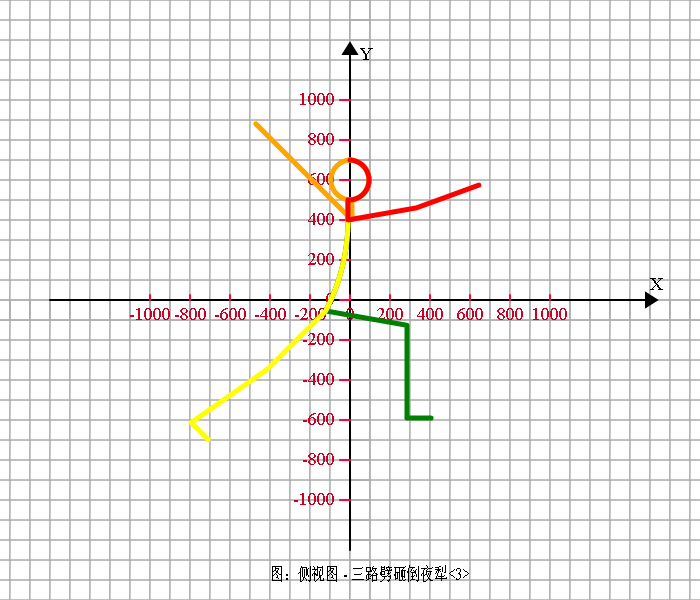
#3-<3> 同 1-<3>
#3-<4> 同 1-<4>
#4-<1> 同 3-<1>
<span style="font-size:18px;">#
#4-<2>
#旋转, 左肢角度取正值,右肢脚度取负值
neckRot = 105; #往左斜从90度减角,往右加角
#左侧取正值,右侧取负值
upBodyCurveRate = -1/1000;
#负y轴为-90, 第四象限为0->-90,其余类推
neckEndAngle = -90 / 180 * math.pi;
midBodyAngle = -90 / 180 * math.pi;
LA = [45, -90, -45];
RA = [-100, -10, 0] ;
LL = [-30, 80, -90];
RL = [-45, 10, -15];
LA = mirror_(LA);
RA = mirror_(RA);
LL = mirror_(LL);
RL = mirror_(RL);
#</span>
<span style="font-size:18px;">#
#4-<3>
#旋转, 左肢角度取正值,右肢脚度取负值
neckRot = 105; #往左斜从90度减角,往右加角
#左侧取正值,右侧取负值
upBodyCurveRate = -1/1000;
#负y轴为-90, 第四象限为0->-90,其余类推
neckEndAngle = -90 / 180 * math.pi;
midBodyAngle = -90 / 180 * math.pi;
LA = [45, -90, -45];
RA = [45, -90, -45] ;
LL = [-70, 120, -120];
RL = [-105, 60, 20];
LA = mirror_(LA);
RA = mirror_(RA);
LL = mirror_(LL);
RL = mirror_(RL);
#</span>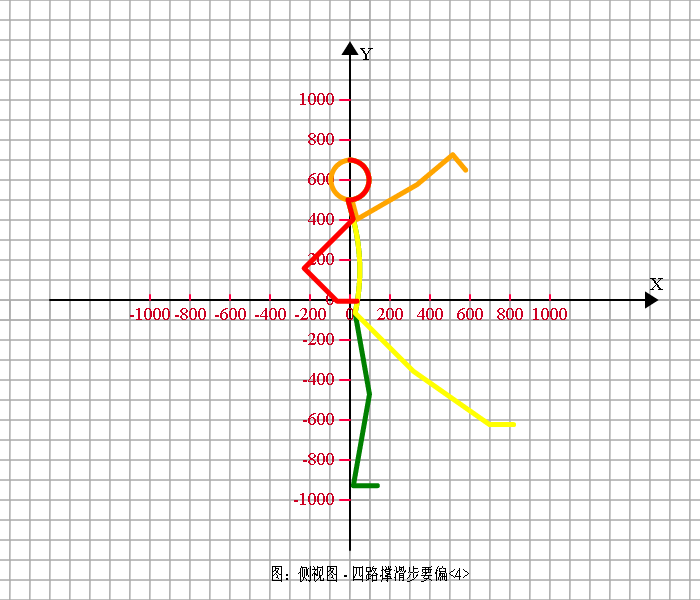
<span style="font-size:18px;">#
#4-<4>
#旋转, 左肢角度取正值,右肢脚度取负值
neckRot = 105; #往左斜从90度减角,往右加角
#左侧取正值,右侧取负值
upBodyCurveRate = -1/1000;
#负y轴为-90, 第四象限为0->-90,其余类推
neckEndAngle = -75 / 180 * math.pi;
midBodyAngle = -90 / 180 * math.pi;
LA = [105, 10, -90];
RA = [-60, 90, 45] ;
LL = [10, -20, 100];
RL = [45, 10, 35];
#</span>
<span style="font-size:18px;">#
#4-<5>
#旋转, 左肢角度取正值,右肢脚度取负值
neckRot = 105; #往左斜从90度减角,往右加角
#左侧取正值,右侧取负值
upBodyCurveRate = -1/1000;
#负y轴为-90, 第四象限为0->-90,其余类推
neckEndAngle = -75 / 180 * math.pi;
midBodyAngle = -90 / 180 * math.pi;
LA = [-150, 0, 0];
RA = [60, 15, 90] ;
LL = [80, -80, 45];
RL = [-45, -10, 55];
#</span>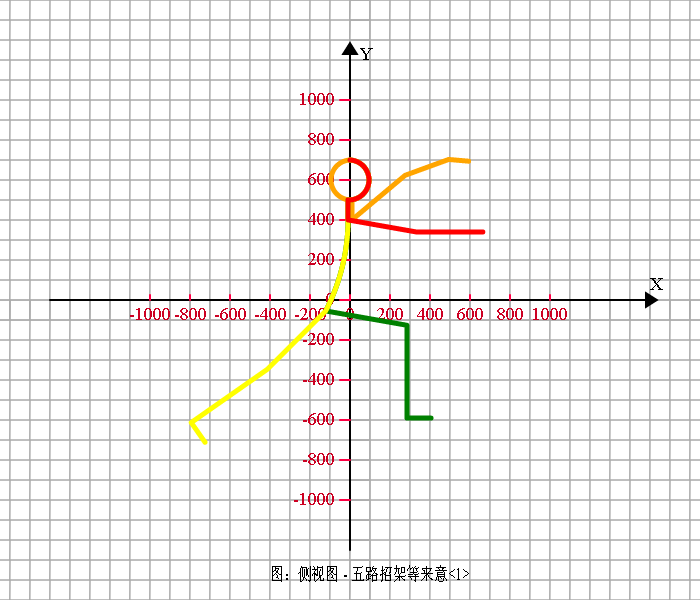
<span style="font-size:18px;">#
#5-<1>
#旋转, 左肢角度取正值,右肢脚度取负值
neckRot = 90; #往左斜从90度减角,往右加角
#左侧取正值,右侧取负值
upBodyCurveRate = -1/1000;
#负y轴为-90, 第四象限为0->-90,其余类推
neckEndAngle = -90 / 180 * math.pi;
midBodyAngle = -90 / 180 * math.pi;
LA = [130, -20, -25];
RA = [80, 10, 0] ;
LL = [80, -80, 90];
RL = [-45, -10, 90];
#</span>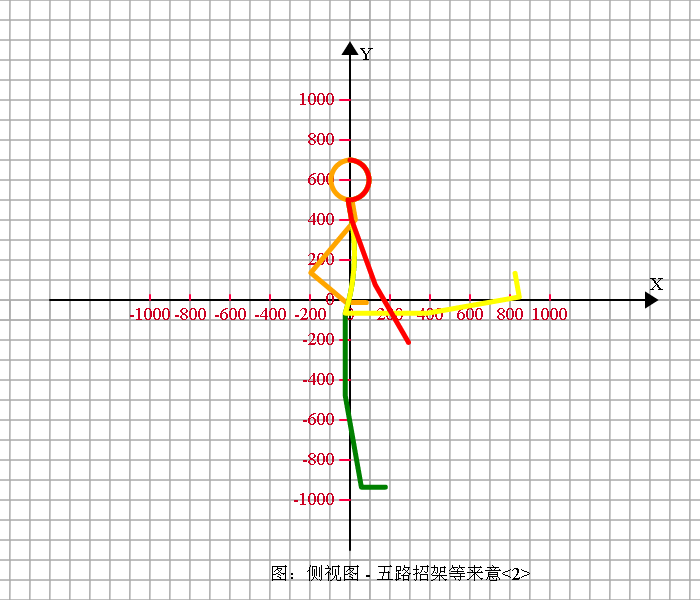
<span style="font-size:18px;">#
#5-<2>
#旋转, 左肢角度取正值,右肢脚度取负值
neckRot = 100; #往左斜从90度减角,往右加角
#左侧取正值,右侧取负值
upBodyCurveRate = -1/1000;
#负y轴为-90, 第四象限为0->-90,其余类推
neckEndAngle = -80 / 180 * math.pi;
midBodyAngle = -90 / 180 * math.pi;
LA = [-50, 90, 40];
RA = [10, 10, 0] ;
LL = [0, 10, 80];
RL = [90, 10, 90];
#</span>
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









