







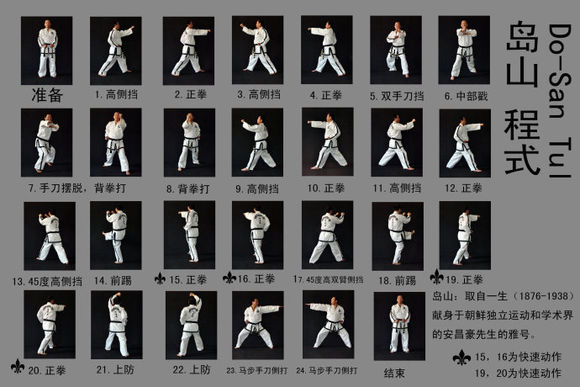
#岛山
左挡->右拳->右挡->左拳->左挡->右戳->右脱->左打->右打->左挡->右打->右挡->左打->左挡
->右踢->右打->左打->右挡->左踢->左打->右打->左防->右防->左打->右打

本节到此结束,欲知后事如何,请看下回分解。
左挡->右拳->右挡->左拳->左挡->右戳->右脱->左打->右打->左挡->右打->右挡->左打->左挡
->右踢->右打->左打->右挡->左踢->左打->右打->左防->右防->左打->右打
左右各进六步
<span style="font-size:18px;">#
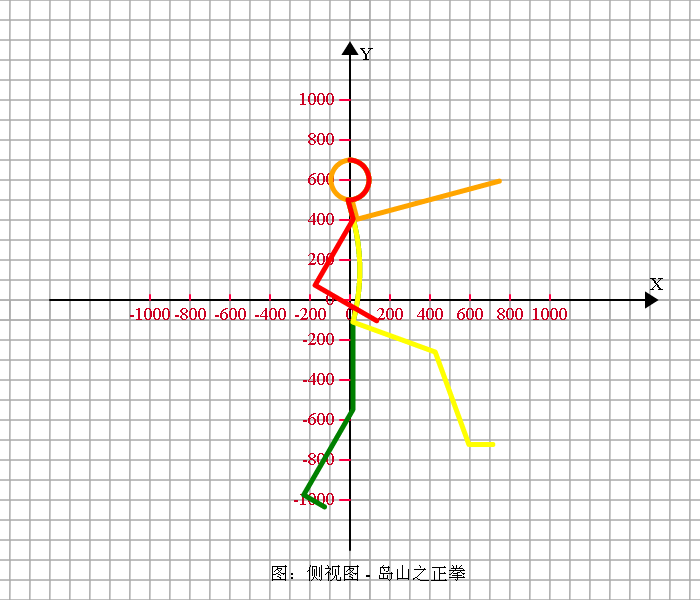
#正拳(岛山的正拳是异手足正拳,不同于檀君的同手足正拳)
#旋转, 左肢角度取正值,右肢脚度取负值
neckRot = 105; #往左斜从90度减角,往右加角
#左侧取正值,右侧取负值
upBodyCurveRate = -1/1000;
#负y轴为-90, 第四象限为0->-90,其余类推
neckEndAngle = -75 / 180 * math.pi;
midBodyAngle = -90 / 180 * math.pi;
LA = [90, 0, 0];
RA = [-45, 90, 0];
LL = [0, -30, 90];
RL = [70, -50, 70];
#</span>
<span style="font-size:18px;">#
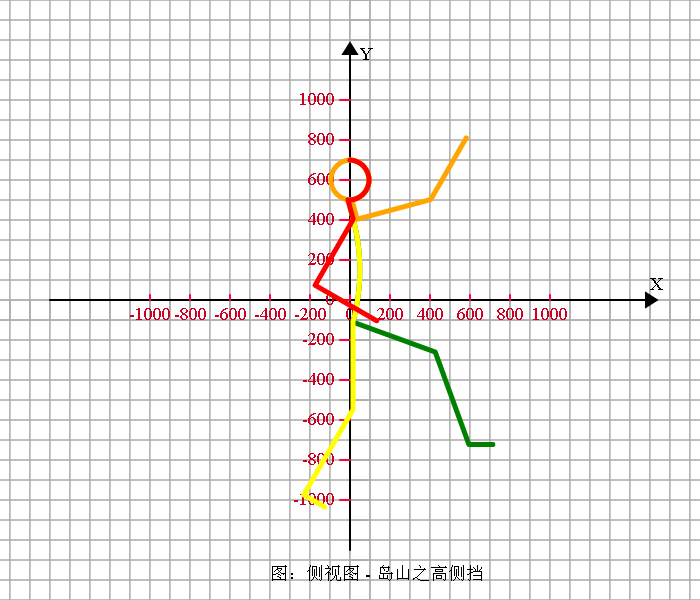
#高侧挡
#旋转, 左肢角度取正值,右肢脚度取负值
neckRot = 105; #往左斜从90度减角,往右加角
#左侧取正值,右侧取负值
upBodyCurveRate = -1/1000;
#负y轴为-90, 第四象限为0->-90,其余类推
neckEndAngle = -75 / 180 * math.pi;
midBodyAngle = -90 / 180 * math.pi;
LA = [90, 45, 0];
RA = [-45, 90, 0];
LL = [70, -50, 70];
RL = [0, -30, 90];
#</span><span style="font-size:18px;">#
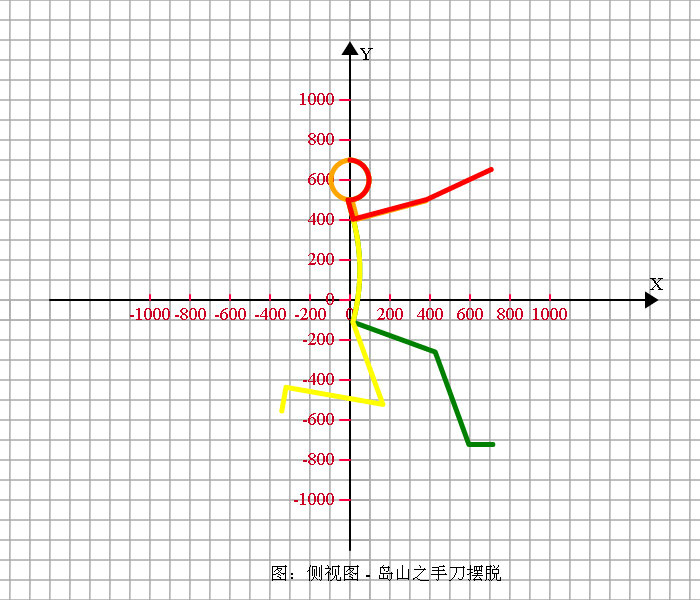
#手刀摆脱
#旋转, 左肢角度取正值,右肢脚度取负值
neckRot = 105; #往左斜从90度减角,往右加角
#左侧取正值,右侧取负值
upBodyCurveRate = -1/1000;
#负y轴为-90, 第四象限为0->-90,其余类推
neckEndAngle = -75 / 180 * math.pi;
midBodyAngle = -90 / 180 * math.pi;
LA = [0, 90, 0];
RA = [90, 10, 0];
LL = [70, -50, 70];
RL = [20, -120, 90];
#</span><span style="font-size:18px;">#
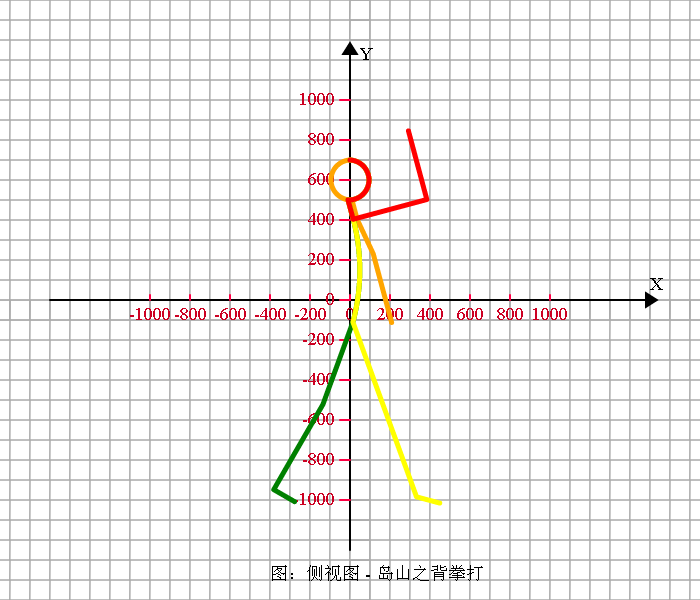
#背拳打
#旋转, 左肢角度取正值,右肢脚度取负值
neckRot = 105; #往左斜从90度减角,往右加角
#左侧取正值,右侧取负值
upBodyCurveRate = -1/1000;
#负y轴为-90, 第四象限为0->-90,其余类推
neckEndAngle = -75 / 180 * math.pi;
midBodyAngle = -90 / 180 * math.pi;
LA = [10, -10, 0];
RA = [90, 90, 0];
LL = [-20, -10, 90];
RL = [20, 0, 55];
#</span><span style="font-size:18px;">#
#前踢
#旋转, 左肢角度取正值,右肢脚度取负值
neckRot = 105; #往左斜从90度减角,往右加角
#左侧取正值,右侧取负值
upBodyCurveRate = -1/1000;
#负y轴为-90, 第四象限为0->-90,其余类推
neckEndAngle = -75 / 180 * math.pi;
midBodyAngle = -90 / 180 * math.pi;
LA = [60, 90, 0];
RA = [60, 90, 0];
LL = [0, -10, 90];
RL = [100, 0, 90];
#</span>
<span style="font-size:18px;">#
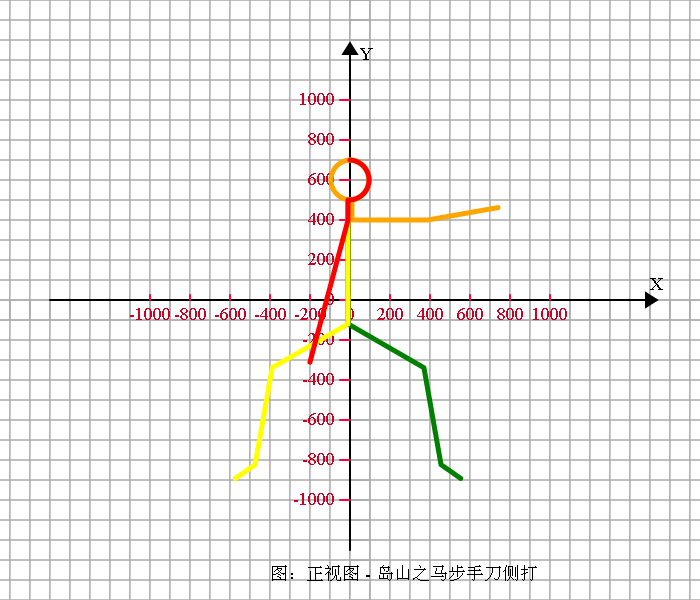
#马步手刀侧打
#旋转, 左肢角度取正值,右肢脚度取负值
neckRot = 90; #往左斜从90度减角,往右加角
#左侧取正值,右侧取负值
upBodyCurveRate = 0;
#负y轴为-90, 第四象限为0->-90,其余类推
neckEndAngle = -90 / 180 * math.pi;
midBodyAngle = -90 / 180 * math.pi;
LA = [90, 10, 0];
RA = [-15, 0, 0];
LL = [60, -50, 45];
RL = [-60, 50, -45];
#</span>本节到此结束,欲知后事如何,请看下回分解。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









