







TiDB从0到1系列
一、系统配置
TiDB的配置分为系统配置和集群配置两种。
其中系统配置对应TiDB Server(不包含TiKV和PD的参数),并持久化在TiKV上。
这类参数不需要重启,设置即刻生效。
与MySQL类似,系统参数有作用域,包括session级和global级别。
实验
表准备
mysql> CREATE TABLE `t1` (
-> `id` int(11) NOT NULL AUTO_INCREMENT,
-> PRIMARY KEY (`id`)
-> ) ENGINE=InnoDB ;
1、session级参数只会影响当前会话
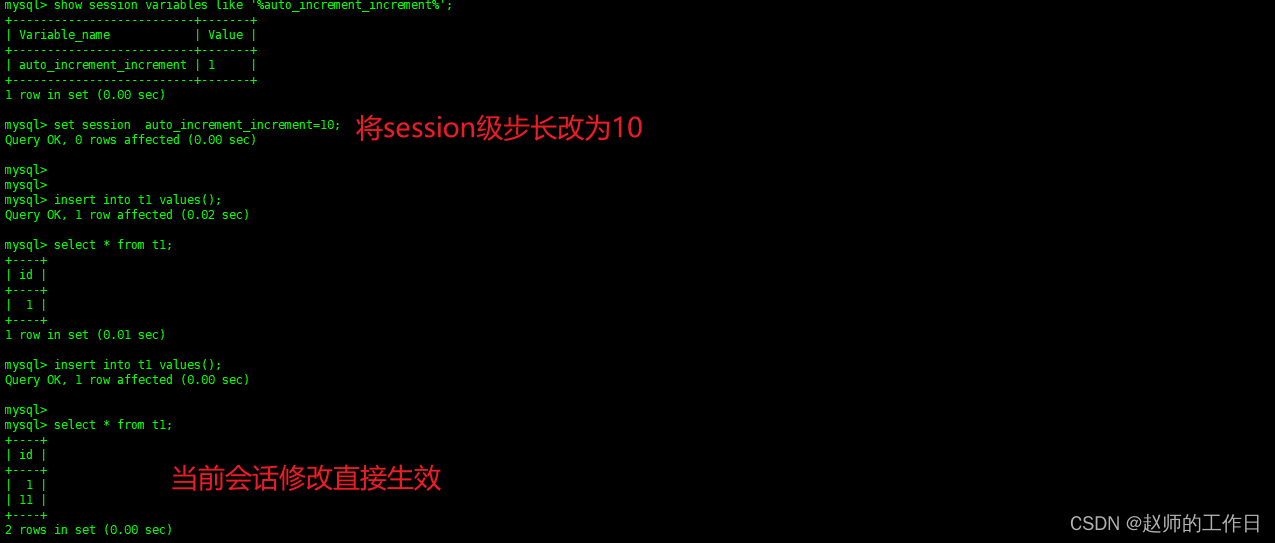
- 会话1:查看当前会话的auto_increment_increment(自增步长)
- 会话1:修改当前会话auto_increment_increment=10
- 会话1:向表中插入空数据
- 会话2:查看当前会话的auto_increment_increment(自增步长)
- 会话2:向表中插入空数据
(会话1)
(会话2)
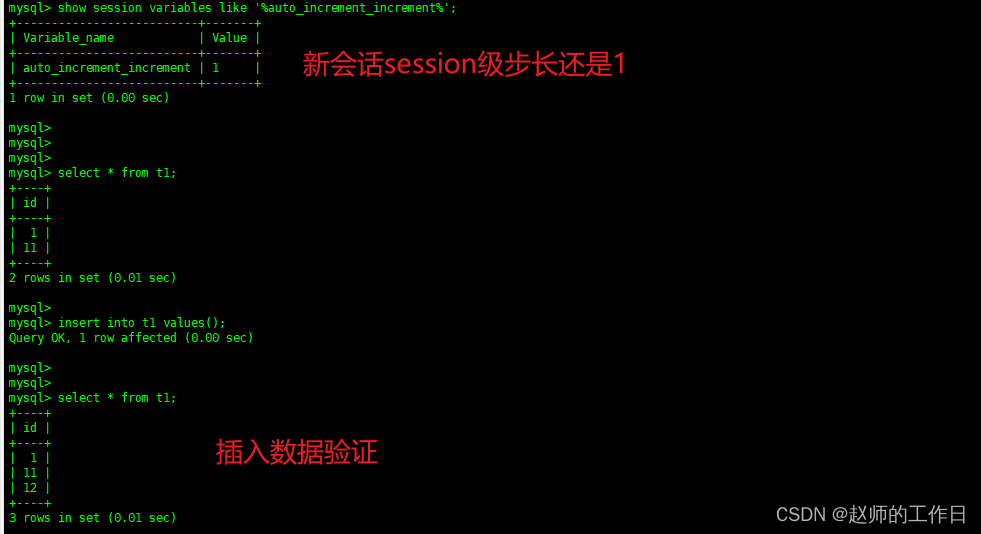
这里看到session级的系统参数修改只会影响到本会话。
2、global级参数只会影响新连入会话
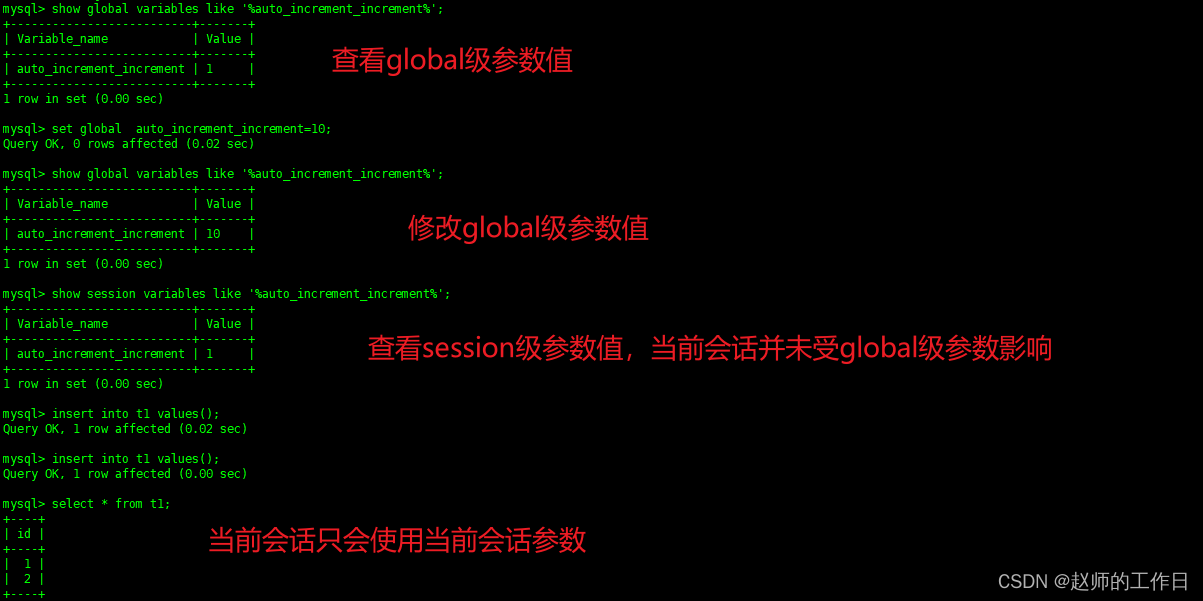
- 会话1:查看global级的auto_increment_increment(自增步长)
- 会话1:修改global级auto_increment_increment=10
- 会话1:查看global级的auto_increment_increment
- 会话1:查看session级的auto_increment_increment
- 会话1:向表中插入空数据
- 会话1:重新登录,并查看global级和session的auto_increment_increment
- 会话1:向表中插入空数据
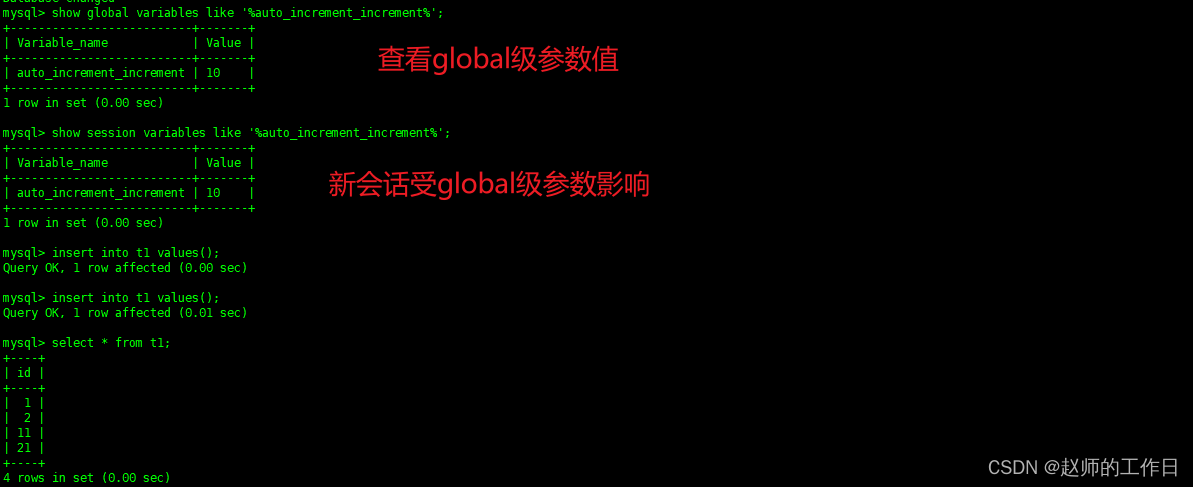
- 会话2:查看global级的auto_increment_increment
- 会话2:查看session级的auto_increment_increment
- 会话2:向表中插入空数据
(会话1)
(会话2)
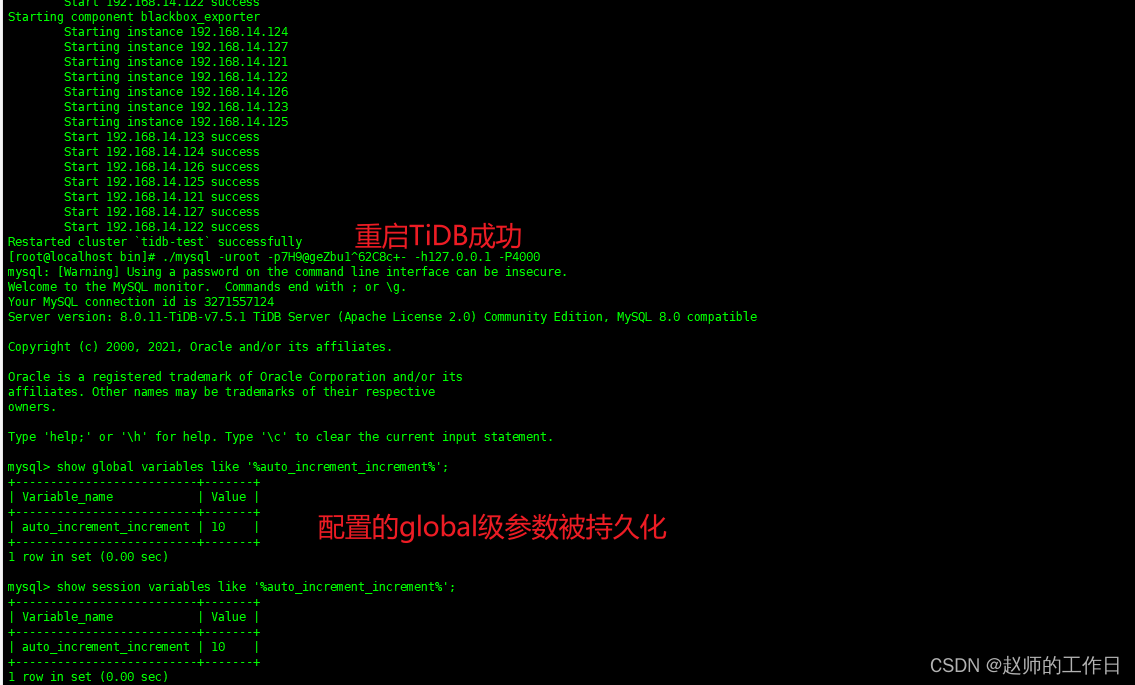
3、global级参数会持久化到TiKV
- 会话1:修改global级auto_increment_increment=10
- 重启TiDB集群
- 会话2:查看global级的auto_increment_increment
- 会话2:查看session级的auto_increment_increment
客户端连接后默认是会话级别
二、集群配置
主要配置TiKV和PD,存储在配置文件中,不能通过客户端修改,只能修改配置文件并重启
实现
- 查看TiKV节点配置
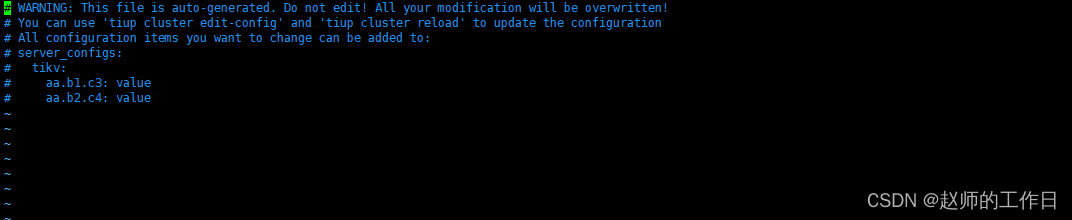
- 修改集群配置
tiup cluster edit-config tidb-test
- 修改配置内容
server_configs:
tidb: {}
tikv:
log-level: warning
- 载入配置(注意!!!该操作会重启各个节点)
tiup cluster reload tidb-test
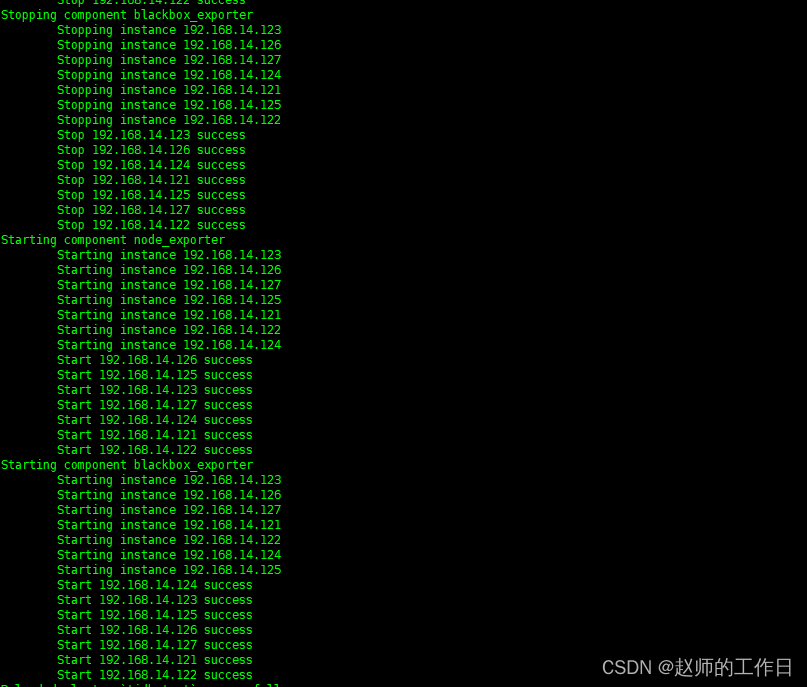
- 重载配置后,各个TiKV节点配置生效

彩蛋
TiDB-5.0版本后可以在线修改部分集群参数(不过为实验特性,生产谨慎使用)。
















 2213
2213

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









