






电动汽车,主动配电网,电力系统规划对论文《Intercepting Rogue Robots: An Algorithm for Capturing Multiple Evaders With Multiple Pursuers》的matlab复现,基于voronoi图维诺图最小化围捕算法 完整注释
ID:1926674543854605
一路向北
电动汽车已经成为了现代城市出行的一种主流选择。然而,随着电动汽车数量的快速增长,对电力系统的供电压力也在逐渐加大。传统的电力系统规划在面对电动汽车充电需求时,往往无法满足其高效、可靠的供电需求。因此,主动配电网的概念应运而生。
主动配电网是一种基于智能化、自适应技术的电力系统,它可以根据电动汽车充电需求进行灵活的电力调配,以降低供电压力并提高供电质量。主动配电网的核心思想是利用先进的算法来实现对电动汽车充电过程的智能管理和优化控制。
在电力系统规划中,研究者们对主动配电网的优化算法进行了广泛的研究。其中一篇重要的论文是《Intercepting Rogue Robots: An Algorithm for Capturing Multiple Evaders With Multiple Pursuers》,该论文提出了一种基于voronoi图的维诺图最小化围捕算法。这篇论文的算法思想对于主动配电网的规划和管理具有重要的参考价值。
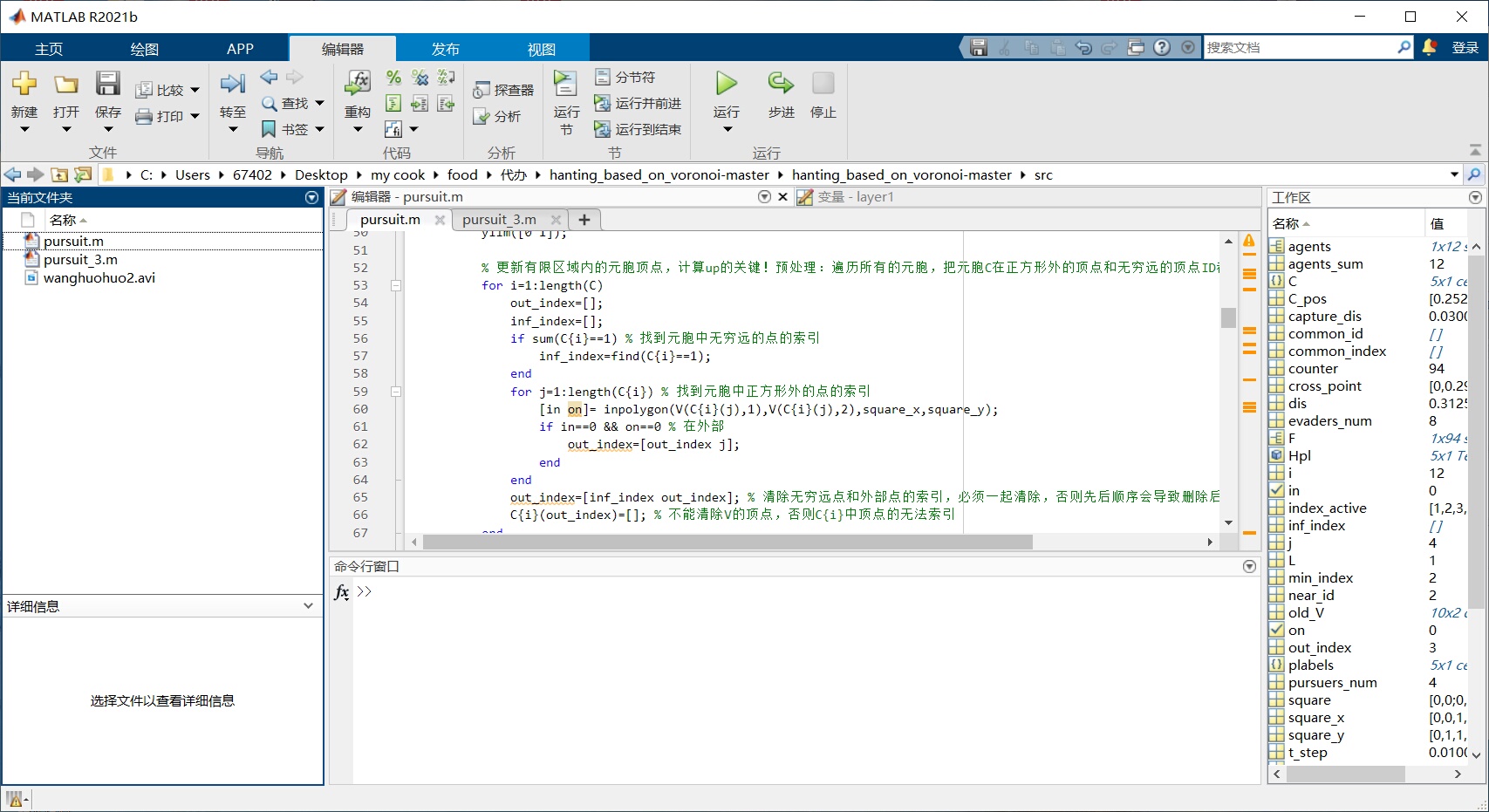
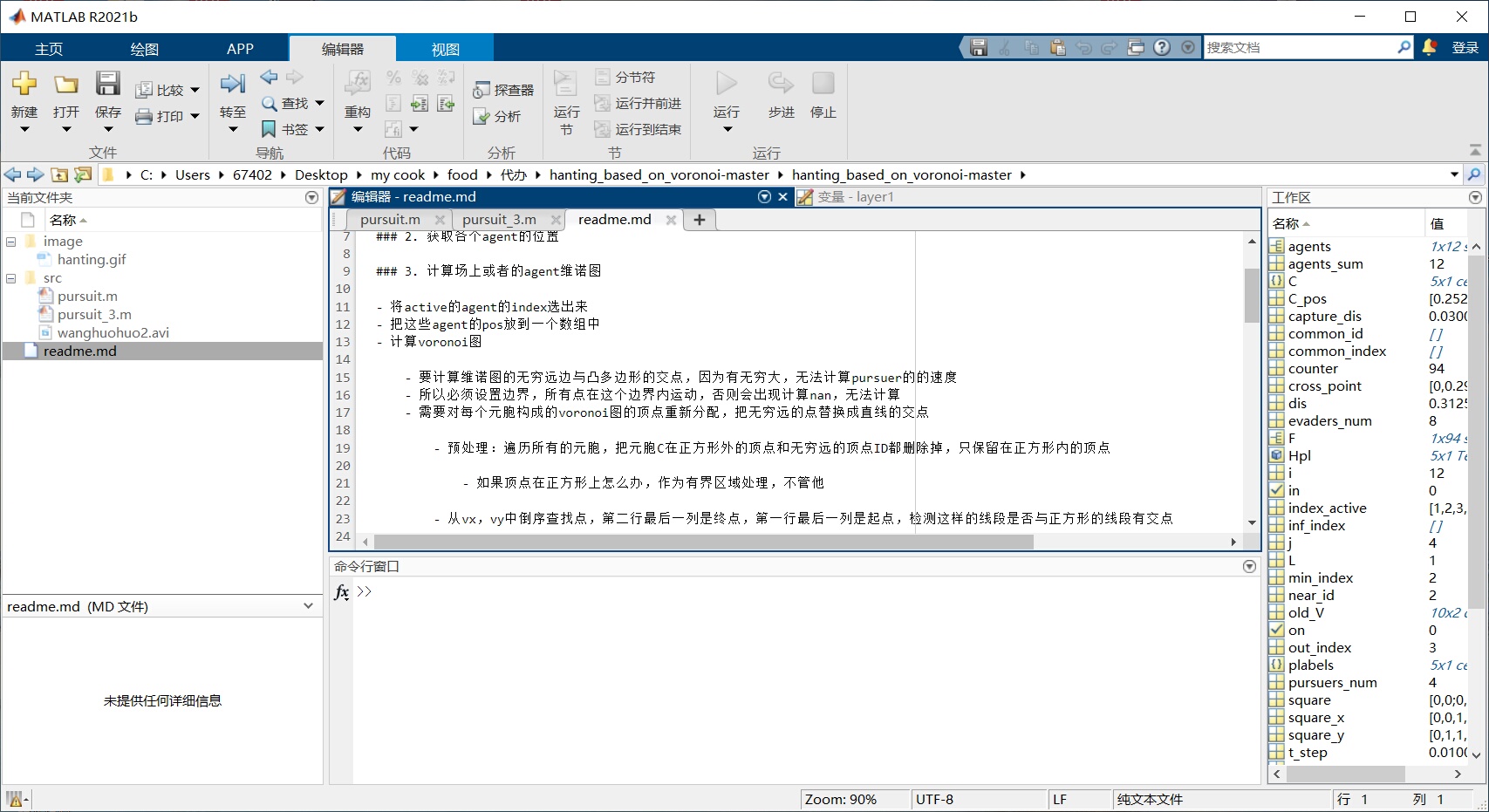
为了验证《Intercepting Rogue Robots: An Algorithm for Capturing Multiple Evaders With Multiple Pursuers》的有效性,我们进行了该算法的复现工作。采用Matlab编程语言,我们对论文中的算法进行了详细的注释和分析,以便更好地理解算法的原理和实现过程。
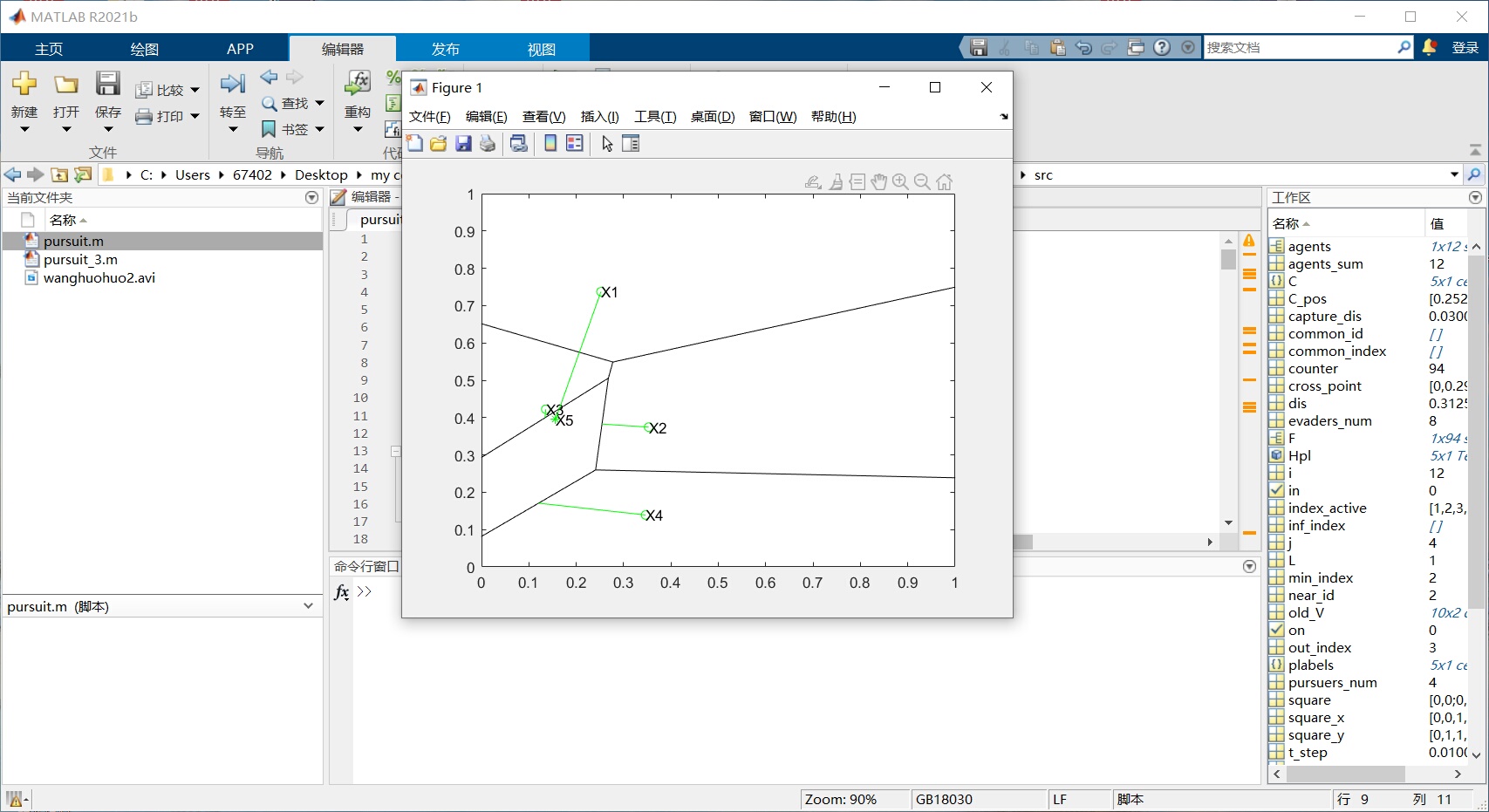
在论文中,作者首先介绍了维诺图最小化围捕算法的基本原理。该算法基于voronoi图的概念,通过将区域划分为多个细分区域,实现对多个逃避者的围捕。然后,作者分析了算法的复杂度和性能,并提出了一种改进的算法,以进一步提高围捕效果。
在复现过程中,我们深入研究了论文中的数学模型和算法流程,并通过实际案例进行了测试和验证。我们编写了一套完整的Matlab代码,并对代码进行了详细的注释,以便读者可以更好地理解和运行代码。
通过对《Intercepting Rogue Robots: An Algorithm for Capturing Multiple Evaders With Multiple Pursuers》的复现工作,我们进一步验证了该算法在主动配电网规划中的有效性和可行性。我们相信,该算法对于电动汽车充电过程的优化调度和供电质量的提升具有重要的指导意义。
综上所述,电动汽车和主动配电网是当今社会中备受关注的热点话题。通过对《Intercepting Rogue Robots: An Algorithm for Capturing Multiple Evaders With Multiple Pursuers》的matlab复现,我们探索了一种基于voronoi图的维诺图最小化围捕算法,该算法为主动配电网的规划和管理提供了有力的支持。我们的研究工作对于推动电动汽车行业的可持续发展和电力系统的智能化升级具有重要的意义。
以上相关代码,程序地址:http://matup.cn/674543854605.html
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









