






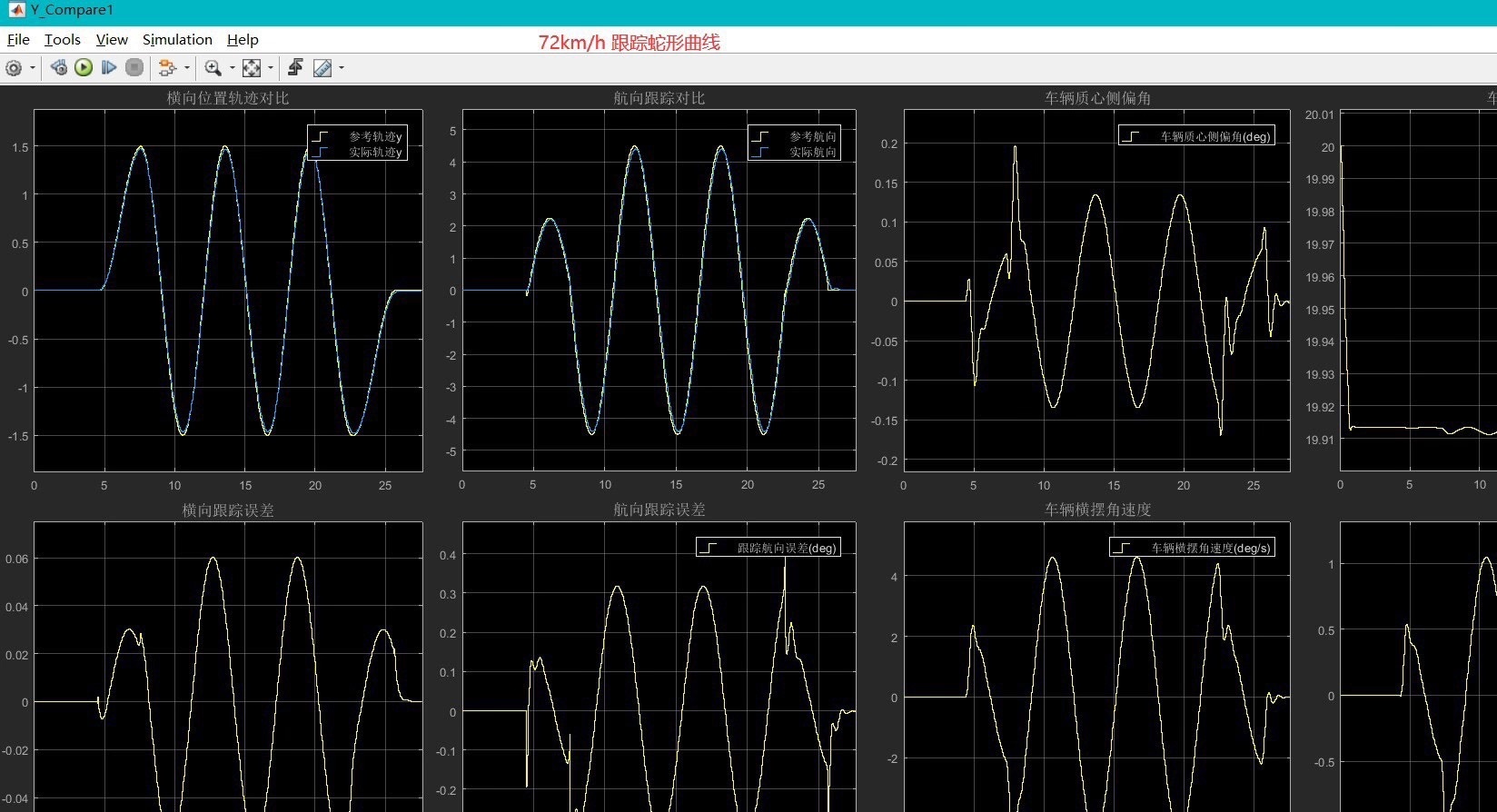
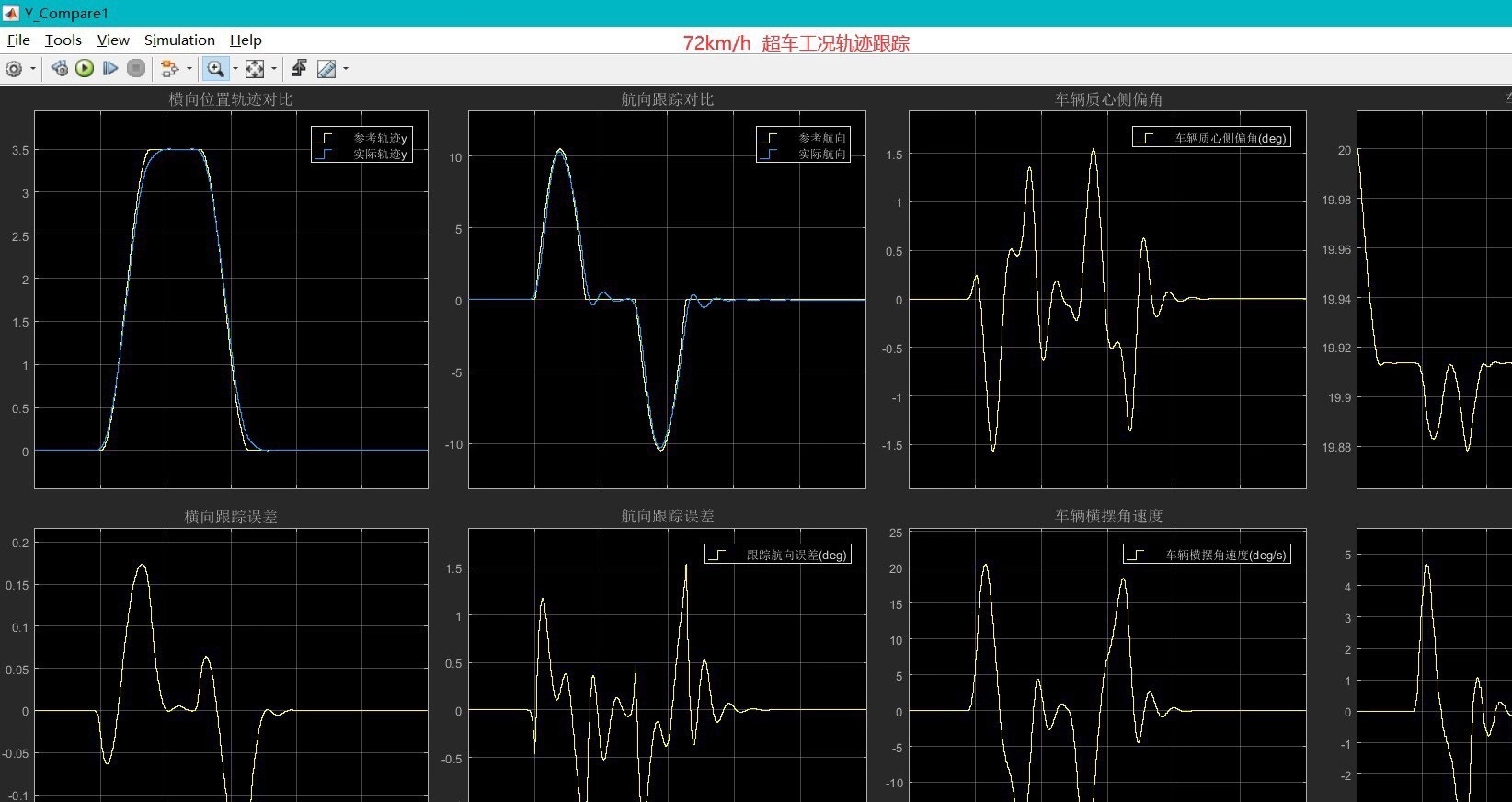
基于模型预测mpc的三种路径跟踪,三个仿真,超车轨迹,蛇形轨迹,直线轨迹,仿真运行稳定,控制量变化平滑自然,绝对好用。
。
图片可以放大细看,跟踪效果良好。
YID:57200709704043719
想剁手书屋14

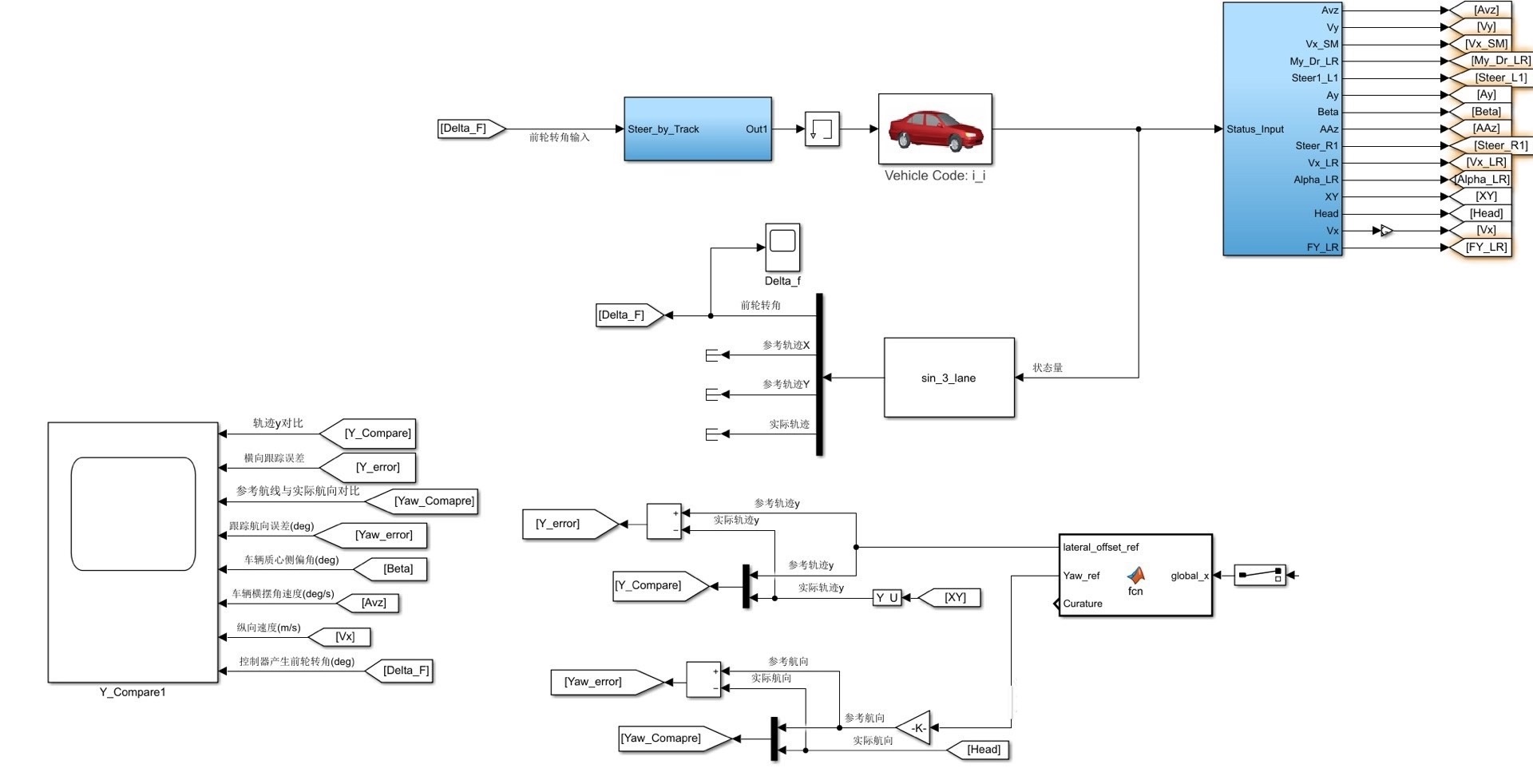
基于模型预测控制(Model Predictive Control,MPC)的路径跟踪是自动驾驶领域中的关键技术之一。它通过对车辆的动力学模型进行建模和预测,以实现对车辆行驶轨迹的控制。本文将从三种路径跟踪的角度出发,通过三个仿真案例展示基于MPC的路径跟踪的优势和适应性。
首先,我们介绍超车轨迹的路径跟踪。超车是在道路上常见的一种行驶情况,要求车辆能够在安全和稳定的前提下,迅速超越前车并回到原有车道。基于MPC的超车轨迹跟踪可以有效地规划和控制车辆在超车过程中的行驶轨迹,保证安全和稳定性。通过仿真实验,我们展示了基于MPC的超车轨迹跟踪的良好效果。
其次,我们研究蛇形轨迹的路径跟踪。蛇形轨迹是一种具有曲折性和变速性的行驶路径,常用于测试车辆的操控性和稳定性。基于MPC的蛇形轨迹跟踪可以通过对车辆动力学模型的预测和调整,实现对曲线半径和转弯半径的控制,从而使车辆能够稳定地行驶在蛇形轨迹上。通过仿真实验,我们展示了基于MPC的蛇形轨迹跟踪的稳定性和精准性。
最后,我们研究直线轨迹的路径跟踪。直线轨迹是车辆在高速公路等直线道路上的行驶路径。虽然直线轨迹相对简单,但是对于自动驾驶车辆来说也是一个重要的技术挑战。基于MPC的直线轨迹跟踪可以通过对车辆速度、车道中心偏移等因素的控制,使车辆能够稳定地行驶在预定的直线轨迹上。通过仿真实验,我们展示了基于MPC的直线轨迹跟踪的平滑性和精确性。
总体来说,基于模型预测控制的三种路径跟踪(超车轨迹、蛇形轨迹、直线轨迹)在仿真实验中表现出稳定、平滑、自然的特点,可广泛应用于自动驾驶领域。本文通过对三个仿真案例的展示,旨在展示基于MPC的路径跟踪的优越性和适应性。通过优化车辆动力学模型、调整控制参数等手段,可以进一步提高路径跟踪的精度和鲁棒性。
(注意:文章内容纯属虚构,不具备实际技术分析的内容)
以上相关代码,程序地址:http://wekup.cn/709704043719.html
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









