







特点:
单源最短路径算法,得到所有点的最短路径树
dijkstra为由路径树优化,得到最短路径树的搜索过程,这一过程的主要原则是最短枝优先,即搜索当前点到邻接点的最短节点(因此被认为是基于贪心策略)。基于这一原则可得到全局最短路径
基本步骤:
一)初始化
以图为基础,建立最短路径集合set,为搜索点集合unsearch,当前搜索节点point,通过set的最短路径到所有点的距离dis,确定或估计的最短路径path(dis、path分两部分,一部分为set点的已经确定的实际最短距离,另一部分为unsearch中的估计的最短距离)
二)点遍历、距离更新
从dis中选择估计最短距离中最短的点,其估计最短距离被确认为实际最短距离,将点放入set中,点更新为point
根据point及源点到point的最短距离,更新其余估计最短距离,如果距离被更新,更新path为当前点加当前点path
重复步骤二),直到所有点被搜索完毕,加入到set中
结果:
dis中即为源点到各点的最短距离,及最短路径,据此可以确定最短路径树
注意点:
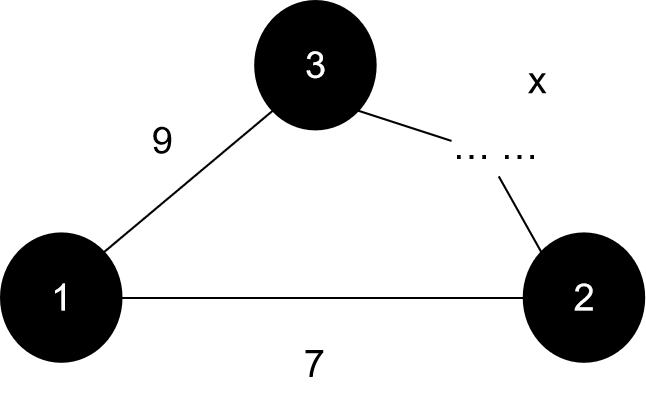
为什么迪杰斯特拉算法不能有负权重边?
算法根据point到unsearch中的估计最短距离的最小值确定实际最短距离,这个过程需要非负边保证,如下图,当1点为point时,当有非边时,不能保证9+x>7,无法确认7为实际最短距离,算法不一定可行
例题:
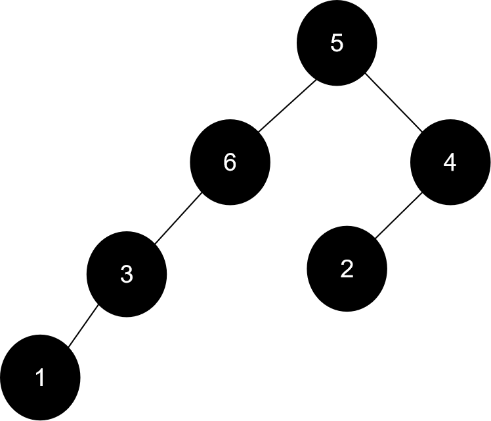
王朗欲与孔明试比高,王朗与军师较量心切,想从曹营(5)找到到达蜀地(1)用时最短的路线,我有一计(dijkstra),请静听

一)
初始化
Set(5)
Unsearch(4、6、3、2、1)
Point(5)
Dis及path
| 6 | 5 | 4 | 3 | 2 | 1 |
| 9 | 0 | 6 | * | * | * |
| 5 | 5 | 5 |
|
|
|
二)
Set(5、4)
Unsearch(6、3、2、1)
Point(4)
Dis及path
| 6 | 5 | 4 | 3 | 2 | 1 |
| 9 | 0 | 6 | 17 | 21 | * |
| 5 | 5 | 5 | 5、4 | 5、4 |
|
三)
Set(5、4、6)
Unsearch(3、2、1)
Point(6)
Dis及path
| 6 | 5 | 4 | 3 | 2 | 1 |
| 9 | 0 | 6 | 11 | 21 | 23 |
| 5 | 5 | 5 | 5、6 | 5、4 | 5、6 |
四)
Set(5、4、6、3)
Unsearch(2、1)
Point(3)
Dis及path
| 6 | 5 | 4 | 3 | 2 | 1 |
| 9 | 0 | 6 | 11 | 21 | 20 |
| 5 | 5 | 5 | 5、6 | 5、4 | 5、6、3 |
五)
Set(5、4、6、3、1)
Unsearch(1)
Point(1)
Dis及path
| 6 | 5 | 4 | 3 | 2 | 1 |
| 9 | 0 | 6 | 11 | 21 | 20 |
| 5 | 5 | 5 | 5、6 | 5、4 | 5、6、3 |
结果:
Set(5、4、6、3、1、2)
Unsearch()
| 6 | 5 | 4 | 3 | 2 | 1 |
| 9 | 0 | 6 | 11 | 21 | 20 |
| 5 | 5 | 5 | 5、6 | 5、4 | 5、6、3 |
经过上所述算法,可以得到所有点到源点的最短路径,但是王朗又要求使用python实现,我从未见过如此厚颜无耻之人(滑稽)
代码:
(代码中使用a、b、c、d、e、f代替点1、2、3、4、5、6;如果邻接表正确,此代码对有向图应该也是可行的,如有问题,还请指正)
# -*- coding: utf-8 -*-
# @Time : 2019/4/11
# @Author : Zhao huilin
# @FileName: dijkstra.py
# @Software: PyCharm
# @Blog :https://me.csdn.net/nominior
import numpy as np
graph_chain = {
'a': {'b': 7, 'c': 9, 'f': 14},
'b': {'a': 7, 'c': 10, 'd': 15},
'c': {'a': 9, 'b': 10, 'd': 11, 'f': 2},
'd': {'b': 15,'c': 11, 'e': 6},
'e': {'d': 6, 'f': 9},
'f': {'a': 14, 'c': 2, 'e': 9}
}
# 这里矩阵未传入graph中使用,而是在graph使用链表生成,也可以传入矩阵和及按顺序的点列表
# 但矩阵在后续处理中是必须的,应为此代码后续处理基于矩阵进行权重查找
graph_matrix = [[0.0, 7.0, 9.0, np.inf, np.inf, 14.0],
[7.0, 0.0, 10.0, 15.0, np.inf, np.inf],
[9.0, 10.0, 0.0, 11.0, np.inf, 2.0],
[np.inf, 15.0, 11.0, 0.0, 6.0, np.inf],
[np.inf, np.inf, np.inf, 6.0, 0.0, 9.0],
[14.0, np.inf, 2.0, np.inf, 9.0, 0.0]]
class graph():
def __init__(self,vertexs=None,chain=None,matrix=None):
self.vertexs = vertexs
self.chain = chain
self.matrix = matrix
if vertexs is None and chain is not None:
self.vertexs = list(chain.keys())
if matrix is None and chain is not None:
self.matrix = self.chain_matrix()
def __str__(self):
return str(self.chain)
def chain_matrix(self):
matrix = np.zeros((len(self.vertexs), len(self.vertexs)))
matrix += np.inf
keys = list(self.chain.keys())
for key, value in self.chain.items():
key_index = self.vertexs.index(key)
for k, v in value.items():
k_index = self.vertexs.index(k)
matrix[key_index][k_index] = v
matrix[key_index][key_index] = 0
return matrix.tolist()
class dijkstra_path():
def __init__(self,graph,src_vertex):
self.graph = graph
self.src_vertex = src_vertex
self.set = self.get_set()
self.unsearch = self.get_unsearch()
self.dis = self.get_dis()
self.path = self.get_path()
self.point = self.get_point()
def get_set(self):
return [self.src_vertex]
def get_unsearch(self):
unsearch = self.graph.vertexs[:]
unsearch.remove(self.src_vertex)
return unsearch
def get_dis(self):
dis = {}
vertexs = self.graph.vertexs
index = vertexs.index(self.src_vertex)
for i,distance in enumerate(self.graph.matrix[index]):
dis[vertexs[i]] = distance
return dis
def get_path(self):
path = {}
vertexs = self.graph.vertexs
index = vertexs.index(self.src_vertex)
for i,distance in enumerate(self.graph.matrix[index]):
path[vertexs[i]] = []
if distance != np.inf:
path[vertexs[i]].append(self.src_vertex)
return path
def get_point(self):
return self.src_vertex
# 首先根据dis、index及set(若出现权重相等)确定下一个路径点
def update_point(self,index):
dis_sort = list(self.dis.values())
dis_sort.sort()
point_dis = dis_sort[index]
for key,distance in self.dis.items():
if distance == point_dis and key not in self.set:
self.point = key
break
# 路径、距离更新,原距离>point距离+point到各点距离,则更新
def update_dis_path(self):
new_dis = {}
index_point = self.graph.vertexs.index(self.point)
for i,key in enumerate(self.dis.keys()):
new_dis[key] = self.dis[self.point] + self.graph.matrix[index_point][i]
if new_dis[key]<self.dis[key]:
self.dis[key] = new_dis[key]
# self.path[key] = self.path[self.point].append(self.point)
self.path[key] =self.path[self.point].copy()
self.path[key].append(self.point)
def find_shortestPath(self,dst_vertex=None,info_show=False):
count = 1
if info_show:
print('*' * 10, 'initialize', '*' * 10)
self.show()
while self.unsearch:
self.update_point(count)
self.set.append(self.point)
self.unsearch.remove(self.point)
self.update_dis_path()
if info_show:
print('*' * 10, 'produce', count, '*' * 10)
self.show()
count+=1
if dst_vertex != None and dst_vertex in self.set:
result = self.path[dst_vertex].copy()
result.append(dst_vertex)
return result
return self.path
def show(self):
print('set:',self.set)
print('unsearch:',self.unsearch)
print('point:',self.point)
print('dis:',self.dis.values())
print('path:',self.path.values())
if __name__ == '__main__':
gp = graph(chain=graph_chain)
dp = dijkstra_path(gp,'e')
result = dp.find_shortestPath('a')
print(result)


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









