






1.利用Tools_RosBag2KITTI软件包从ubuntu当中录制的rosbag文件提取出点云文件和图像文件
1.1 克隆Tools_RosBag2KITTI软件包,官方地址为:https://github.com/leofansq/Tools_RosBag2KITTI.git,
git clone https://github.com/leofansq/Tools_RosBag2KITTI.git
1.2进入catkin_ws文件夹中
cd catkin_ws1.3编译
catkin_make1.4查看rosbag中对应的雷达点云话题以及图像话题,修改Tools_RosBag2KITTI/catkin_ws/src/obstacle_detection/src/map_generation_node.cpp文件中对应的订阅话题(map_generation_node.cpp文件中的27-28对应雷达点云话题,30-31对应图像话题),修改输出的点云和图像保存路径(对应/Tools_RosBag2KITTI/catkin_ws/output/pcd以及/Tools_RosBag2KITTI/catkin_ws/output/png,修改位置位于map_generation_node.cpp文件中的52和112行)修改后的map_generation_node.cpp如下
#include "map_generation_node.h"
#include <ros/ros.h>
#include <cv_bridge/cv_bridge.h>
#include <sensor_msgs/PointCloud2.h>
#include <sensor_msgs/Image.h>
#include <pcl_conversions/pcl_conversions.h>
#include <pcl/io/pcd_io.h>
#include <pcl/common/transforms.h>
#include <opencv2/opencv.hpp>
#include <Eigen/Geometry>
using namespace cv;
double trans_roll_ = 0.0;
double trans_pitch_ = 0.0;
double trans_yaw_ = 0.0;
double trans_tx_ = 0.0;
double trans_ty_ = 0.0;
double trans_tz_ = 0.0;
Eigen::Affine3f transform_matrix_ = Eigen::Affine3f::Identity();
MapGenerationNode::MapGenerationNode()
: lidar_index(0), camera_captured(false), it(nh), init_camera_time(false), init_lidar_time(false)
{
ROS_INFO("Initializing MapGenerationNode...");
sub_lidar = nh.subscribe("/livox/lidar", 1000, &MapGenerationNode::lidarCallback, this);
ROS_INFO("Subscribed to /livox/lidar");
sub_camera = it.subscribe("/bow_cam/image_raw", 1000, &MapGenerationNode::cameraCallback, this);
ROS_INFO("Subscribed to /bow_cam/image_raw");
// Ensure both subscriptions are active
ROS_INFO("MapGenerationNode initialized.");
}
void MapGenerationNode::lidarCallback(const sensor_msgs::PointCloud2::ConstPtr& lidar)
{
ROS_INFO("lidarCallback triggered");
if (!init_lidar_time)
{
lidar_base_time = lidar->header.stamp.sec * 1e3 + lidar->header.stamp.nsec / 1e6;
init_lidar_time = true;
ROS_INFO("Initialized lidar base time: %lld ms", lidar_base_time);
}
long long lidar_delta_time = lidar->header.stamp.sec * 1e3 + lidar->header.stamp.nsec / 1e6 - lidar_base_time;
ROS_INFO("Received lidar data: %lld ms", lidar_delta_time);
char s[200];
snprintf(s, sizeof(s), "/home/jetson/Tools_RosBag2KITTI/catkin_ws/output/pcd/%06lld.pcd", lidar_index);
++lidar_index;
camera_captured = false;
pcl::PointCloud<pcl::PointXYZI> lidar_cloud;
pcl::fromROSMsg(*lidar, lidar_cloud);
// 打印原始点云数据的大小
ROS_INFO("Original PointCloud size: %zu", lidar_cloud.size());
// 重置变换矩阵
transform_matrix_ = Eigen::Affine3f::Identity();
transform_matrix_.translation() << trans_tx_, trans_ty_, trans_tz_;
transform_matrix_.rotate(Eigen::AngleAxisf(trans_yaw_ * M_PI / 180, Eigen::Vector3f::UnitZ()));
transform_matrix_.rotate(Eigen::AngleAxisf(trans_pitch_ * M_PI / 180, Eigen::Vector3f::UnitY()));
transform_matrix_.rotate(Eigen::AngleAxisf(trans_roll_ * M_PI / 180, Eigen::Vector3f::UnitX()));
// 检查转换矩阵
ROS_INFO_STREAM("Transform matrix: \n" << transform_matrix_.matrix());
pcl::PointCloud<pcl::PointXYZI>::Ptr trans_cloud_ptr(new pcl::PointCloud<pcl::PointXYZI>);
pcl::transformPointCloud(lidar_cloud, *trans_cloud_ptr, transform_matrix_);
// 打印变换后点云数据的大小
ROS_INFO("Transformed PointCloud size: %zu", trans_cloud_ptr->size());
// 验证点云数据的完整性(可选)
for (const auto& point : trans_cloud_ptr->points)
{
if (std::isnan(point.x) || std::isnan(point.y) || std::isnan(point.z))
{
ROS_WARN("NaN point detected after transformation.");
}
}
pcl::PCDWriter writer;
writer.writeBinary(s, *trans_cloud_ptr);
ROS_INFO("Saved PCD file: %s", s);
}
void MapGenerationNode::cameraCallback(const sensor_msgs::ImageConstPtr& camera)
{
ROS_INFO("cameraCallback triggered");
if (!init_camera_time)
{
camera_base_time = camera->header.stamp.sec * 1e3 + camera->header.stamp.nsec / 1e6;
init_camera_time = true;
ROS_INFO("Initialized camera base time: %lld ms", camera_base_time);
}
long long camera_delta_time = camera->header.stamp.sec * 1e3 + camera->header.stamp.nsec / 1e6 - camera_base_time;
if (camera_captured)
{
ROS_INFO("Camera already captured for this lidar frame.");
return;
}
ROS_INFO("Received camera data: %lld ms", camera_delta_time);
char s[200];
snprintf(s, sizeof(s), "/home/jetson/Tools_RosBag2KITTI/catkin_ws/output/png/%06lld.png", lidar_index - 1);
cv_bridge::CvImagePtr cv_ptr;
try
{
cv_ptr = cv_bridge::toCvCopy(camera, sensor_msgs::image_encodings::BGR8);
}
catch (cv_bridge::Exception& e)
{
ROS_ERROR("cv_bridge exception: %s", e.what());
return;
}
if (!cv_ptr || cv_ptr->image.empty())
{
ROS_ERROR("Failed to convert image message to cv::Mat.");
return;
}
try
{
bool result = imwrite(s, cv_ptr->image);
if (result)
{
ROS_INFO("Image saved successfully: %s", s);
}
else
{
ROS_ERROR("Failed to save image: %s", s);
}
}
catch (const cv::Exception& e)
{
ROS_ERROR("OpenCV exception: %s", e.what());
}
camera_captured = true;
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "map_generation");
MapGenerationNode mapgeneration;
ROS_INFO("MapGenerationNode started");
ros::spin();
return 0;
}
1.5在catkin_ws文件夹下重新编译
catkin_make1.6运行roscore,没有的话可以自行安装,推荐使用鱼香一键ROS安装,跟着提示即可安装,非常简单,否则在下一步运行过程中会报错,如下图
wget http://fishros.com/install -O fishros && . Fishros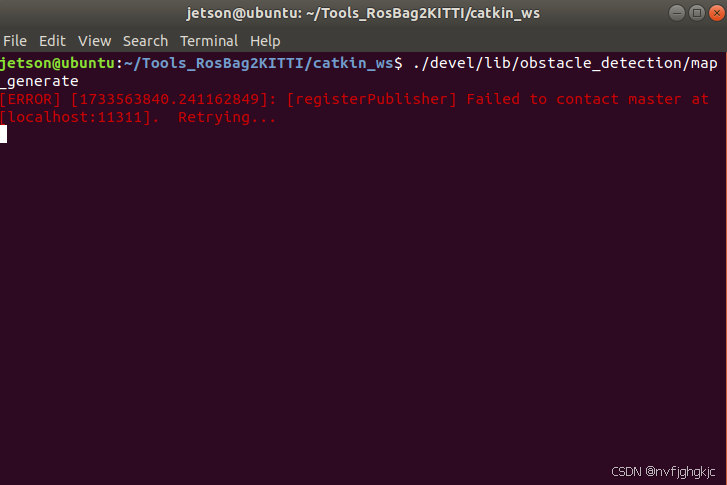
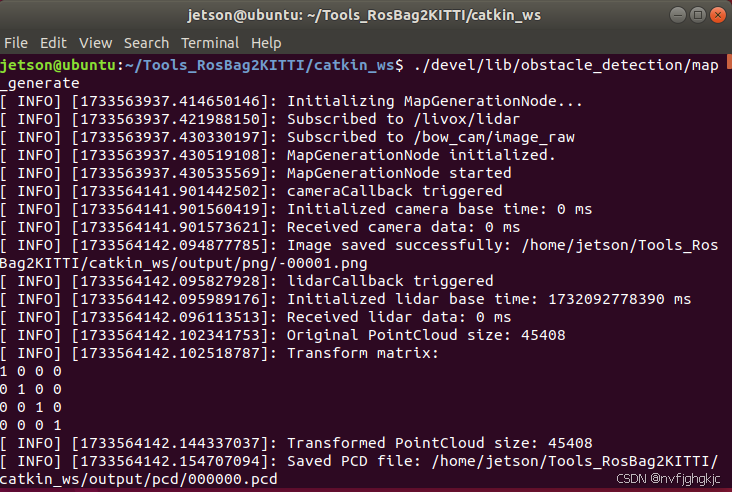
1.7在catkin_ws文件夹的终端下运行以下命令从bag文件中读取pcd和png文件,正常运行文件如下,可以看到订阅的话题对应我们自己在1.4中修改后的话题
./devel/lib/obstacle_detection/map_generate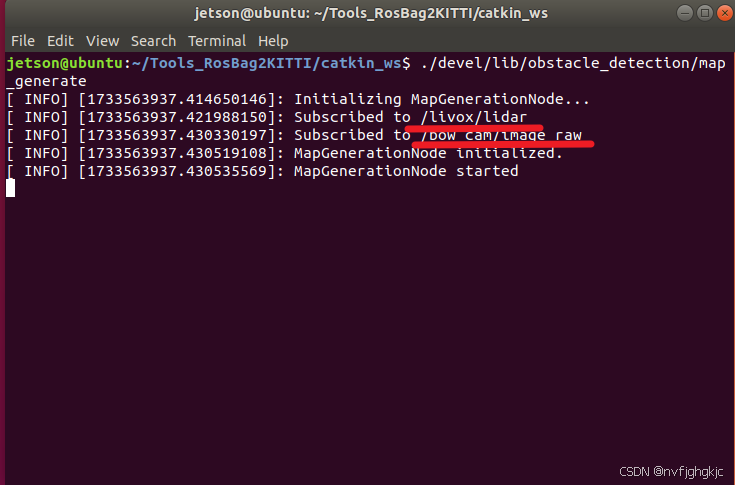
1.8运行我们需要读取的rosbag包(rosbag文件位置随意),这里我们以0.1倍速去运行rosbag,如果速度过大,节点可能跳过部分数据,或者因为频率过高而丢失重要信息。
rosbag play -r 0.1 input.bag ™
™
可以看到我们1.7步的终端中会跟着保存我们对应的点云以及图像数据,如下图
保存的点云以及图像数据地址如下:
/Tools_RosBag2KITTI/catkin_ws/output
2.pcd点云文件转KITTI数据集要求的bin文件
2.1 pcd文件转bin文件
路径转至/Tools_RosBag2KITTI/pcd2bin下
将1.8步/Tools_RosBag2KITTI/catkin_ws/output/pcd中保存的点云文件复制到当前文件夹的pcd文件夹中
在/Tools_RosBag2KITTI/pcd2bin路径下创建一个项目进行编译
mkdir CMakeFile #创建文件夹
cd CMakeFile #进入文件夹
cmake .. #编译
make #编译
2.2修改/Tools_RosBag2KITTI/pcd2bin/ pcd2bin.cpp文件中的路径(修改85和86行为输出的bin文件夹和输入的pcd文件夹地址),pcd2bin.cpp文件如下:
#include <iostream>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <dirent.h>
#include <vector>
#include <algorithm>
#include <fstream>
using namespace std;
// 将 PCD 文件转换为 BIN 文件
void pcd2bin(const string &in_file, const string &out_file)
{
// 创建一个 PointCloud 对象
pcl::PointCloud<pcl::PointXYZI>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZI>);
// 尝试加载 PCD 文件
if (pcl::io::loadPCDFile<pcl::PointXYZI>(in_file, *cloud) == -1)
{
PCL_ERROR("Couldn't read file: %s\n", in_file.c_str());
return; // 如果加载失败,退出函数
}
// 尝试创建并打开 .bin 文件
ofstream bin_file(out_file.c_str(), ios::out | ios::binary);
if (!bin_file.good())
{
cout << "Couldn't open output file: " << out_file << endl;
return; // 如果打开失败,退出函数
}
// 将 PCD 转换为 BIN
cout << "Converting " << in_file << " to " << out_file << endl;
for (const auto& point : cloud->points)
{
// 旋转点云坐标系
float new_x = point.y;
float new_y = -point.x;
float z = point.z;
float intensity = point.intensity;
// 写入旋转后的坐标和强度值
bin_file.write(reinterpret_cast<char*>(&new_x), sizeof(float));
bin_file.write(reinterpret_cast<char*>(&new_y), sizeof(float));
bin_file.write(reinterpret_cast<char*>(&z), sizeof(float));
bin_file.write(reinterpret_cast<char*>(&intensity), sizeof(float));
}
bin_file.close();
}
// 读取指定类型的文件列表
void read_filelists(const string &dir_path, vector<string> &out_filelists, const string &type)
{
struct dirent *ptr;
DIR *dir = opendir(dir_path.c_str());
if (!dir) {
cerr << "Error opening directory: " << dir_path << endl;
return;
}
out_filelists.clear();
while ((ptr = readdir(dir)) != NULL)
{
string tmp_file = ptr->d_name;
if (tmp_file[0] == '.') continue;
if (tmp_file.size() >= type.size() && tmp_file.substr(tmp_file.size() - type.size()) == type)
{
out_filelists.push_back(ptr->d_name);
}
}
closedir(dir);
}
// 排序文件列表
void sort_filelists(vector<string> &filelists)
{
sort(filelists.begin(), filelists.end());
}
int main(int argc, char **argv)
{
// 设置文件路径
string bin_path = "/home/jetson/Tools_RosBag2KITTI/pcd2bin/bin/";
string pcd_path = "/home/jetson/Tools_RosBag2KITTI/pcd2bin/pcd/";
// 声明并读取文件列表
vector<string> file_lists;
read_filelists(pcd_path, file_lists, "pcd");
sort_filelists(file_lists);
// 一个一个地转换 PCD 到 BIN
for (const auto& file : file_lists)
{
string pcd_file = pcd_path + file;
string bin_file = bin_path + file.substr(0, file.length() - 4) + ".bin";
pcd2bin(pcd_file, bin_file);
}
return 0;
}
之后在CMakeFile文件夹路径下运行以下命令进行相应的bin文件的生成,下图为生成的bin文件夹
./pcd2bin


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









