









Fast R-CNN
Fast R-CNN - Fast Regin-based Convolutional Network for Objection Detection
1. R-CNN
R-CNN 采用深度网络来对 object proposals 分类以进行目标检测,其缺点如下:
训练是 multi-stage 的.
- a). R-CNN 首先采用 log loss 对 object proposals 微调 ConvNet;
- b). 然后将 ConvNet 特征送入 SVMs 分类器. 将 SVMs 作为目标检测器,取代微调的 softmax 分类器;
- c). 学习 bounding-box 回归器.
训练的空间和时间代价较高.
训练 SVM 和 bounding-box 回归器时,需要对每张图像的每个 object proposal 进行特征提取,并写入磁盘.
采用深度网络,比如 VGG16,对 VOC07 trainval 数据集的 5K 张图片,这个过程需要 2.5 GPU-days;且提取的特征需要大量的存储空间.
目标检测速度慢.
测试时,对每张测试图片的每个 object proposal 进行特征提取.
基于 VGG16 的检测,单张 GPU 卡,每张图片需要 47s.
2. SPPNet
由于 R-CNN 需要对每个 object proposal 进行 ConvNet 前向计算,且没有共享计算,造成其速度较慢.
SPPNets,Spatial Pyramid Pooling Networks,通过共享计算来提高 R-CNN 的速度.
SPPNets 对整张输入图片计算一个卷积 feature map,采用从共享特征图(feature map)提取的特征向量来对每个 object proposal 进行分类.
每个 proposal 的特征提取,是采用 max-pooling 将 proposal 的特征图的一部分转换成固定尺寸的输出(fixed-size output, e.g. 6*6) 得到的. 多个输出尺寸采用 pool 操作,并连接为空间金字塔池化(spatial pyramid pooling).
SPPNet 的测试效率,是 R-CNN 的 10 - 100 倍. 由于较快的特征提取速度,训练时间也降低了 3 倍.
但,SPPNet 的明显缺点在于:
- 类似于 R-CNN,其训练也是 multi-stage 的,包括,特征提取,利用 log loss 微调网络,训练 SVMs 分类器,以及拟合 bounding-box 回归器.
- 特征也需要写入磁盘.
- 与 R-CNN 不同在于,SPPNets 的微调算法不能对 spatial pyramid pooling 的卷积层进行更新,这也就限制了其在深度网络中的精度.
3. Fast R-CNN
相对于 R-CNN 和 SPPNet, Fast R-CNN 解决了以上它们的不足,并提升了速度和精度. 其优势在于,
- 较高的检测质量(mAP)
- 训练是 single-stage 的,采用了 multi-task loss
- 训练可以对整个网络层进行更新
- 不需要磁盘空间来缓存特征.
Fast R-CNN 网络结构为:
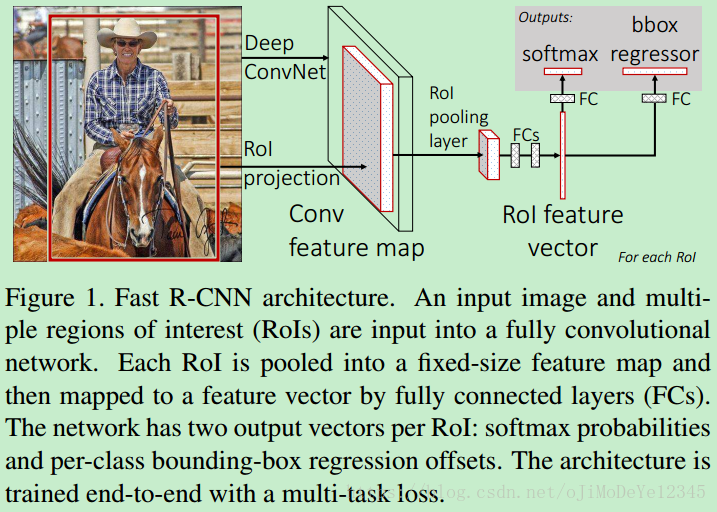
Figure 1. Fast R-CNN 结构. 一张输入图片和多个 RoIs 作为全卷积网络的输入,每个 RoI 被池化到一个固定尺寸的特征图,并采用全连接层映射为一个特征向量. 对于每个 RoI,网络有两个输出向量:softmax 概率和 per-class bounding-box 回归偏移值. 网络是采用 multi-task loss 进行 end-to-end 训练的.
Fast R-CNN 采用整张图片和 object proposals 集作为网络输入.
网络首先几个卷积层和 max-pooling 层对整张图片处理,得到一个 conv feature map.
然后,对每一个 object proposal,采用 RoI pooling 层从 feature map 中提取一个固定长度的特征向量;
每个特征向量被送入一系列的全连接层,最终有两个分支:一个分支得到 softmax 概率值,共 K 个 object 类和一个 background 类;另一个分支针对 K 个 object 类输出四个实值,分别表示了每类 object 的 bounding-box 位置.
3.1 RoI Pooling 层
RoI pooling 层采用 max-pooling 来将任何有效的 RoI 内的 features 转化为一个小的 feature map,其是固定空间尺寸( H∗W H ∗ W , e.g. 7∗7 7 ∗ 7 )的. 其中 H H 和 是独立于任何 RoI 超参数.
这里,一个 RoI 是在 conv feature map 的一个方框. 每个 RoI 是由四元组 (r,c,h,w) ( r , c , h , w ) 定义,分别指定了 RoI 的左上角 (r,c) ( r , c ) 和 高度和宽度 (h,w) ( h , w ) .
RoI max-pooling 层通过将 h∗w h ∗ w 的 RoI windows 分割为 H∗W H ∗ W 的 sub-windows 网格,共 h/H∗w/W h / H ∗ w / W , 并对每个 sub-windows 的值进行 max-pooling 处理,得到对应的输出网格单元. 对每个 feature map channel 分别 pooling 处理,类似于 标准 max-pooling.
RoI 层可以简单的看成 SPPNet 中的 spatial pyramid pooling 层的一种特例.
RoI 是从原图RoI区域映射到卷积区域,最后pooling到固定大小的功能,通过池化把该区域的尺寸归一化成卷积网络输入的尺寸.
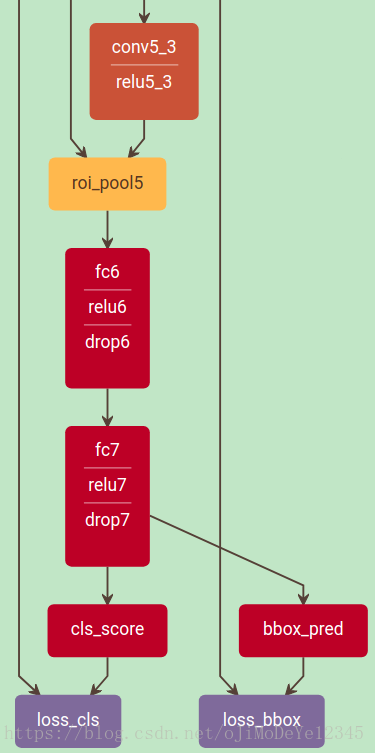
3.2 网络的初始化
基于在 ImageNet 预训练的网络来初始化 Fast R-CNN 网络.
基于 VGG16 的训练网络输出部分如图:
3.3 Fast R-CNN 训练
Fast R-CNN 训练过程中,SGD 先采样 N 张图像,再对每张图片采样 R/N R / N 个 RoIs,以分层采样 mini-batches.
相同图片的 RoIs 在前向和反向传播过程中,共享计算和内存.
Fast R-CNN 联合训练 softmax 分类器和 bounding-box 回归起,而分别训练 softmax 分类器,SVMs,回归器.
3.3.1 Multi-task loss
Fast R-CNN 网络有两个输出层,一个输出每个 RoI 对 K+1 K + 1 类object 的离散概率分布, p=(p0,…,pK) p = ( p 0 , … , p K ) . 其中, p p 是对全连接层的 个输出计算的 softmax 概率;另一个输出 K K 个 object 类的 bounding-box 回归偏移值,.
每个训练 RoI 的标签为 groundtruth class u u 和 groundtruth bounding-box regression target .
对每个 labeled RoI,采用 multi-task loss L L 联合训练分类和边界框回归:
其中,
Lcls(p,u)=−log(pu) L c l s ( p , u ) = − l o g ( p u ) 是对真实 class u u 的 log loss.
if |x|≤1, smoothL1(x)=0.5x2, otherwise, smoothL1(x)=|x|−0.5 i f | x | ≤ 1 , s m o o t h L 1 ( x ) = 0.5 x 2 , o t h e r w i s e , s m o o t h L 1 ( x ) = | x | − 0.5
λ λ 控制两个 task losses 的权重. 这里, λ=1 λ = 1 .
3.3.2 Mini-batch 采样
Fast R-CNN 微调过程中,每个 SGD 的 mini-batch 是随机选取的 N=2 N = 2 张图片.
这里采用 R=128 R = 128 的 mini-batches,每张图片采样 64 RoIs.
选取与 groundtruth bounding box 的 IoU(intersection over union) 大于 0.5 的 object proposals 的 25%. 这些 RoIs 由 标注了前景 object class 的 样本组成, u≥1 u ≥ 1 .
剩下的 RoIs 是从与 groundtruth 的最大 IoU 值在区间 [0.1,0.5] [ 0.1 , 0.5 ] 的 object proposals 中采样得到. 这些 RoIs 的样本标签是背景类, u=0 u = 0 .
IoU 阈值小于 0.1 的样本作为 hard example mining.
网络训练时,图片随机水平翻转. 无其它数据增广处理.
3.3.3 RoI pooling 层的 BP 反向传播
假设每个 mini-batch 只有一张图片, N=1 N = 1 . 由于RoI 前向传播是将 mini-batch 内的多张图片单独处理,其反向传播,只需将 N>1 N > 1 直接扩展即可.
记 RoI Pooling 层的第 i i 个激活输入为 ,第 r r 个 RoI 的第 个输出为 yrj y r j .
RoI Pooling 层计算 yrj=xi∗(r,j) y r j = x i ∗ ( r , j ) ,其中 i∗(r,j)=argmaxi′∈R(r,j)xi′ i ∗ ( r , j ) = a r g m a x i ′ ∈ R ( r , j ) x i ′ , R(r,j) R ( r , j ) 是 sub-window 内输入的索引集,在该 sub-window 内,采用 max pooling 对输出单元 yrj y r j 进行处理. 单个 xi x i 可能有多个不同输出 yrj y r j .
RoI pooling 层的 backwards 函数是计算 loss 函数分别关于每个输入 xi x i 的偏微分:
∂L∂xi=∑r∑j[i=i∗(r,j)]∂L∂yrj ∂ L ∂ x i = ∑ r ∑ j [ i = i ∗ ( r , j ) ] ∂ L ∂ y r j
对于每个 mini-batch 的 RoI r r 和 每个 pooling 输出 ,偏微分 ∂L/∂yrj ∂ L / ∂ y r j 是 max pooling 时所选取的 i i 的累加.
在反向传播时,偏微分 已经由 RoI pooling 层的输出层的 backwards 函数计算.
4. Fast R-CNN 检测
Fast R-CNN 模型训练后,假设 object proposals 已经计算得到,只需要一次 forward pass. 输入是一张图片和 一个包含 R R 个 object proposals 的列表. 测试时, 一般取值 2000.
对于每个测试 RoI r r ,网络输出一个类别后验概率分布 和所预测的一个相对于 r r 的 bounding-box 偏移值, 类 objects 分别得到对应的 bounding-box 预测值.
采用估计的概率 Pr(class=k|r)=pk P r ( c l a s s = k | r ) = p k 来设定每个 object 类 k k 的检测置信度. 再对每一类分别采用 NMS 算法(non-maximum suppression) 进行处理.
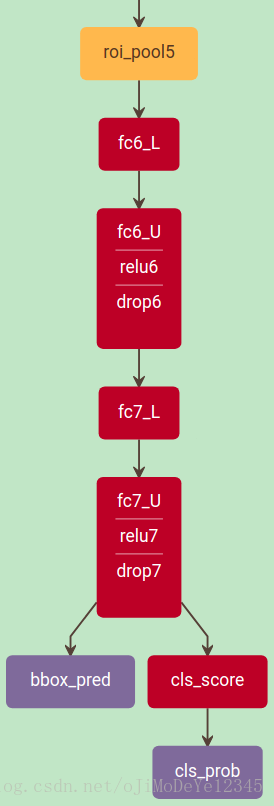
4.1 截断 SVD 加快检测速度
对于整张图片的分类,全连接层的耗时相对于卷积层来说是很少的. 但是对于检测问题,需要处理的 RoIs 的数量较多,几乎将近一半的 forward 时间都花在全连接层. 采用 truncated SVD 对全连接层进行压缩可以较容易的加快速度.
权重参数 , u×v u × v ,利用SVD,其逼近分解形式为:
W≈U∑tVT W ≈ U ∑ t V T
其中, U U 是 的矩阵,由 W W 的前 个左奇异向量组成; ∑t ∑ t 是 t×t t × t 对角矩阵, 其值是 W W 的最大的 个奇异值; V V 是 的矩阵,由 W W 的前 个由奇异向量组成.
SVD 将参数数量由 uv u v 减少到 t(u+v) t ( u + v ) .
为了压缩网络,单个全连接层 W W 被替换为两个全连接层,二者之间不设非线性变换层. 第一个全连接层采用权重矩阵 (无 biases),第二个全连接层采用全中矩阵 U U (与 相关的原始 biases).
当 RoIs 数量较多时,这种方法能够很好的加快检测速度.
如图:














 2556
2556











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









