






仅用于以文字梳理一遍关于旋转过程中的逻辑。
网上动不动可得,可知。让萌新变得懵逼。所以个人梳理一下,有问题可及时沟通。
旋转一般以矩阵的方式来记录
这里目前只接触了欧拉角矩阵和四元数,其它内容接触到后续更新
欧拉角矩阵的旋转矩阵推导:
推导可以看最近整理的部分:
https://blog.csdn.net/one_day_csdn/article/details/134790732?spm=1001.2014.3001.5502。
这里主要记录一些概念:
多次旋转时,旋转矩阵乘的顺序,也就是我们说的左乘和右乘。
左乘和右乘有时候搞混了,发现算法总是不对。闹心死。
左乘和右乘:
先给出目前总结的结论:
右乘是,按照自身坐标系的旋转
左乘是,固定坐标系的旋转
右乘证明:
假设有3个坐标系a,b,c,a旋转到b,然后再b旋转到c。
a为最初的坐标系
b相对于a的旋转矩阵,记作Rba
c相对于b的旋转矩阵,记作Rcb
c相对于a的旋转矩阵,记作Rca
这里的相对于谁,也就是绕哪个坐标系的轴旋转
点M在各个坐标系的坐标为Ma,Mb,Mc。点M的位置没有动,只是坐标系动了。
这里可以得到
Ma = Rba * Mb;
Ma = Rca * Mc;
Mb = Rcb * Mc;
上面这个等式应该没问题吧,o( ̄▽ ̄)ブ
简单点说就是
以Ma = Rba * Mb为例。
是不是也有人曾经跟我一样,一开始理解成为了Mb = Rba * Ma。
a坐标系上的点,Ma旋转之后,得到b坐标系上的点Mb。这么一想还挺合理。
O(∩_∩)O这样是不对的哦。
我们展开讲讲:
我们先需要将b中的坐标点,放到a坐标系中,将坐标系的旋转,转换成为了坐标系a中的点Mb1 (这里是把坐标系做了置换,在b中坐标为Mb那么a中也有一个点Mb 坐标记为Mb1),然后Mb1经过旋转后得到了点Ma 也就是b中的点Mb。
所以Ma = Rba * Mb成立。其它等式一个意思
然后三个等式进行代入,
Rba * Mb = Rca * Mc;
带入Mb
Rba * Rcb * Mc = Rca * Mc;
从而知道
Rba * Rcb = Rca
这个等式说明了,a旋转到c,等同于a先旋转到b,再旋转到c。
右乘推导成功啦,o( ̄▽ ̄)ブ
左乘证明:
假设有两个坐标系a,b。 a中有两个点Ma和Na,M和N之间的旋转矩阵是Rnm 。b中的坐标为Mb和Nb,M和N之间的旋转矩阵是Rnbmb 。坐标系a和b之间的旋转关系为Rba.
则:
Ma = Rnm Na
Ma = RbaMb
Na = RbaNb
将上面的式子做代入
RbaMb = RnmRbaNb
又因为Mb= Rnbmb Nb
所以Rba Rnbmb Nb = RnmRbaNb
所以RbaRnbmbRab = Rnm
也就是先把坐标系转过去,然后旋转点,然后再把坐标系转回来。
扩展到三个坐标系a,b,c
这里的矩阵R1是为了和之前的相对坐标系移动R区分
坐标系a为固定坐标系
坐标系b相对于a的旋转,旋转矩阵是R1ba
坐标系c相对于a的旋转,旋转矩阵是R1ca
坐标系c相对于b的旋转,在固定坐标系下旋转矩阵是 R1cb
R1ba = Rba
R1ca = Rca
R1cb = Rba * Rcb * Rab
考虑上面右乘时的最终结果公式
Rba * Rcb = Rca
所以R1ca = Rca = Rba * Rcb
又因为R1cb = Rba * Rcb * Rab得到
Rcb = Rab * R1cb * Rba
这里是两边同时进行了左乘和右乘消掉了。应该没啥疑问。
所以
R1ca = Rba * Rab * R1cb * Rba=R1cb * Rba = R1cb * R1ba
所以左乘是固定坐标系,推导完成。
至于向量的旋转就不用说了吧。都是左乘。
四元数和旋转矩阵之间的推导
首先,确认绕任意轴旋转的旋转矩阵

这里是依赖于将旋转的向量,针对于旋转轴切分为水平向量和平行向量,水平的不需要动,而计算垂直的向量的操作
具体可参考https://blog.csdn.net/u014265928/article/details/117170481。
这位解释的很清晰。有疑问大家一起沟通。
这个矩阵用的n和θ表示。
其中四元数和这两个部分的关系是:
w = cos(θ/2);
x = nxsin(θ/2)
y = nysin(θ/2)
z = nzsin(θ/2)
这个结论是因为q = cos(θ/2) + (xi + yj + z*k)*sin(θ/2) 。这块的半角来源推导还在思考中,待后续理通了更新。
有了这个结论,就可以去求四元数的旋转矩阵模式了。
这里依赖的重要的公式是三角函数倍角公式
cosθ=1−2sin2 (θ/2)
sinθ = 2sin(θ/2)cos(θ/2)
将角度用θ转换为θ/2
替换到矩阵中后,就可以得到每个位置依赖于四元数的表现结果。
另外因为x2 + y2 + z2 + w2 = 1;对角线部分可以根据需要做替换

从旋转矩阵到四元数
这个其实我个人认为是一个观察式的结果,O(∩_∩)O。
想到了,就知道了。没想到,就绷不住了。
我们观察上面的四元数旋转矩阵。
对角线相加,会发现,
(1−2y 2 −2z 2)+(1−2x 2−2z 2 )+(1−2x 2−2y 2)
=3−4(x 2+y 2 +z 2)
=3−4(1−w2)
=4w 2−1.
所以我们可以一以此为依据求出来w。
然后想求x,y,z可以通过对角线的三个值进行操作,大家可以试下。
不过这里会出现都是对应值的平方的情况。没有选择正根和负根的依据。
所以我们在求出来,w,x,y,z的其中一项后,可以以它为依据求其它的
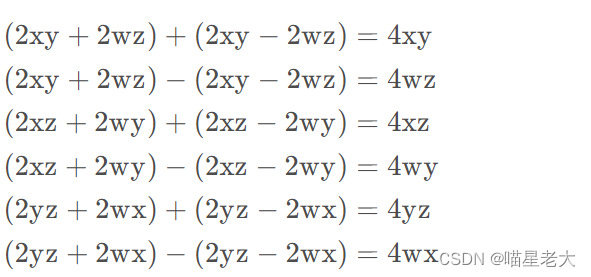
有了四个值中的任意一个,我们就可以把其它三个求出来。















 632
632











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









