







 这篇博客演示了如何使用图像处理技术自动检测图像中的圆形目标。通过调整参数,如敏感度和边缘阈值,可以成功识别不同颜色和对比度的圆,包括重叠或靠得很近的圆。
这篇博客演示了如何使用图像处理技术自动检测图像中的圆形目标。通过调整参数,如敏感度和边缘阈值,可以成功识别不同颜色和对比度的圆,包括重叠或靠得很近的圆。
此示例说明如何自动检测图像中的圆形目标并可视化检测到的圆。
步骤 1:加载图像
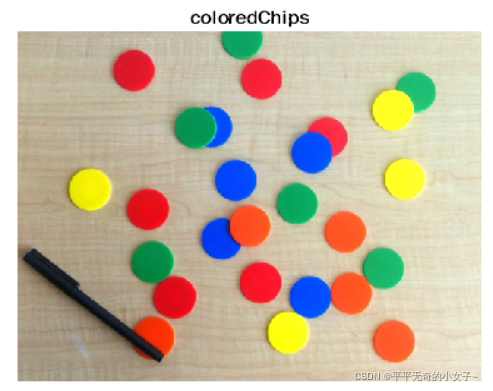
读取并显示包含各种颜色的圆形塑料片的图像。除了有大量要检测的圆之外,从圆检测的角度来看,此图像还有一些有趣的特点:
有不同颜色的塑料片,它们相对于背景有不同对比度。一方面,蓝色和红色塑料片在此背景上形成强烈的对比。另一方面,一些黄色塑料片与背景的对比不明显。
请注意一些塑料片重叠在一起,而另一些塑料片则靠得很近,几乎互相接触。对于目标检测来说,场景中存在重叠的对象边缘和对象遮挡通常具有挑战性。
rgb = imread('coloredChips.png'); %加载图像
imshow(rgb);
title('coloredChips');
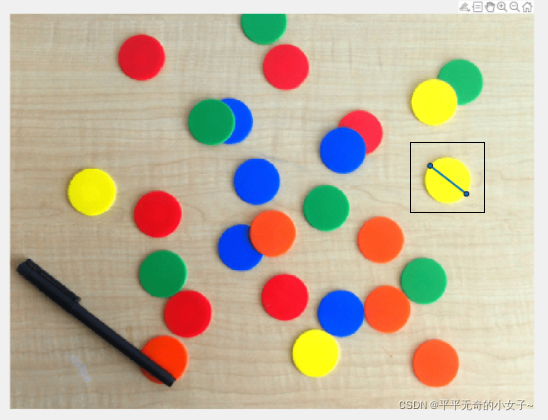
步骤 2:确定搜索圆的半径范围
使用 drawline 函数找到合适的圆半径范围。在塑料片的近似直径上绘制一条线。
rgb = imread('coloredChips.png'); %加载图像
imshow(rgb);
title('coloredChips');
d = drawline; %使用 drawline 函数找到合适的圆半径范围
pos = d.Position;
diffPos = diff(pos);
diameter = hypot(diffPos(1),diffPos(2));
步骤 3:寻找圆的初步尝试
imfindcircles 函数搜索符合半径范围的圆。搜索半径在 20 到 25 个像素范围内的圆。在此之前,最好要清楚对象是比背景亮还是比背景暗。要回答该问题,请看此图像的灰度版本。
rgb = imread('coloredChips.png'); %加载图像
subplot(1,2,1);
imshow(rgb);
title('coloredChips');
%d = drawline; %使用 drawline 函数找到合适的圆半径范围
% pos = d.Position;
% diffPos = diff(pos);
% diameter = hypot(diffPos(1),diffPos(2));
gray_image = rgb2gray(rgb); %转为灰度图像
subplot(1,2,2);
imshow(gray_image); %显示灰度图像
title('coloredChips灰度图');
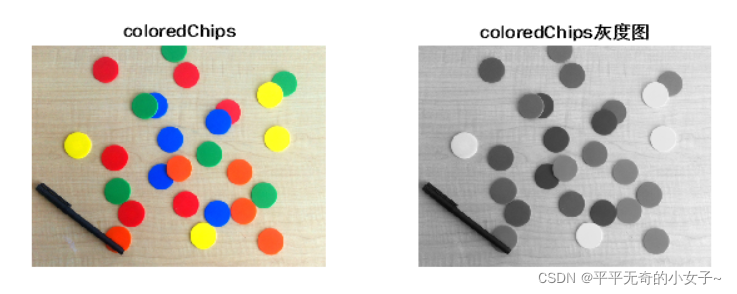
背景相当亮,大多数塑料片比背景暗。但是,默认情况下,imfindcircles 会找到比背景亮的圆形目标。因此,在 imfindcircles 中将参数 ‘ObjectPolarity’ 设置为 ‘dark’ 以搜索较暗的圆。
>> [centers,radii] = imfindcircles(rgb,[20 25],'ObjectPolarity','dark') %在 imfindcircles 中将参数 'ObjectPolarity' 设置为 'dark' 以搜索较暗的圆
centers =
[]
radii =
[]
请注意,输出 centers 和 radii 为空,这意味着未找到圆。这种情况经常发生,因为 imfindcircles 是圆形检测器,与大多数检测器类似,imfindcircles 有内部检测阈值决定其敏感度。简而言之,这意味着检测器对某个(圆形)检测的信心必须大于某个水平,才将其视为有效检测。imfindcircles 有参数 ‘Sensitivity’,可用于控制此内部阈值,从而控制算法的敏感度。较高的 ‘Sensitivity’ 值会将检测阈值设置得较低,并导致检测到更多圆。这类似于家庭安全系统中使用的运动检测器的敏感度控制。
步骤 4:提高检测敏感度
回到塑料片图像,在默认敏感度水平下,可能所有圆都低于内部阈值,因此未检测到圆。‘Sensitivity’ 是介于 0 和 1 之间的数字,默认设置为 0.85。将 ‘Sensitivity’ 提高到 0.9。
>> [centers,radii] = imfindcircles(rgb,[20 25],'ObjectPolarity','dark', 'Sensitivity',0.9) %将 'Sensitivity' 设置为 0.9
centers =
146.1895 198.5824
328.8132 135.5883
130.3134 43.8039
175.2698 297.0583
312.2831 192.3709
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









