






RRT算法路径规划及避障程序2D
RRT算法二维路径规划与避障的MATLAB程序,基于随机采样的路径规划,快速探索随机树路径规划,程序包可运行,有简单英文注释
ID:2230734131848594
UVWY仿真编程
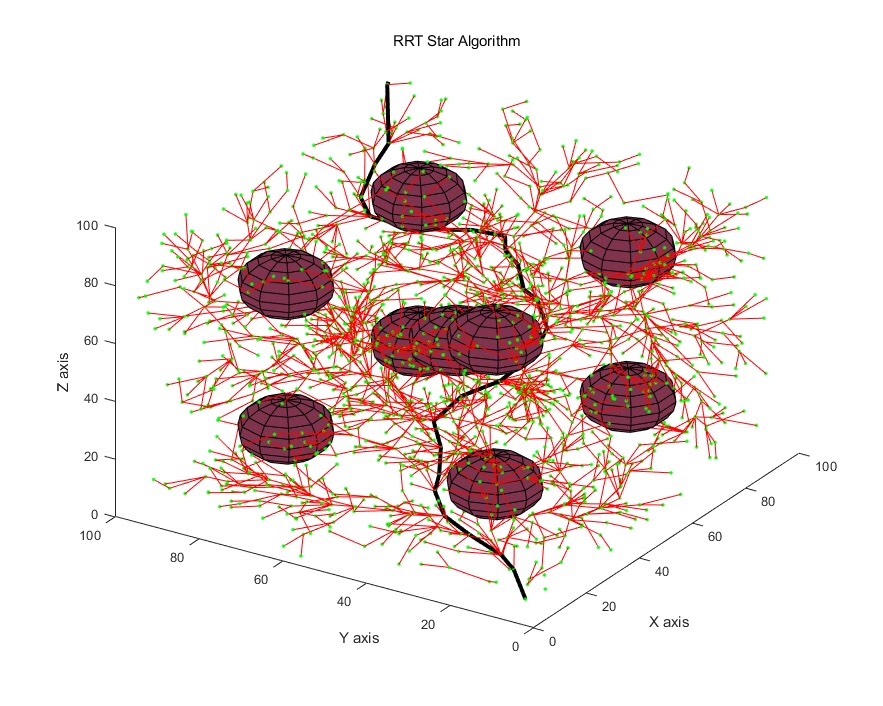
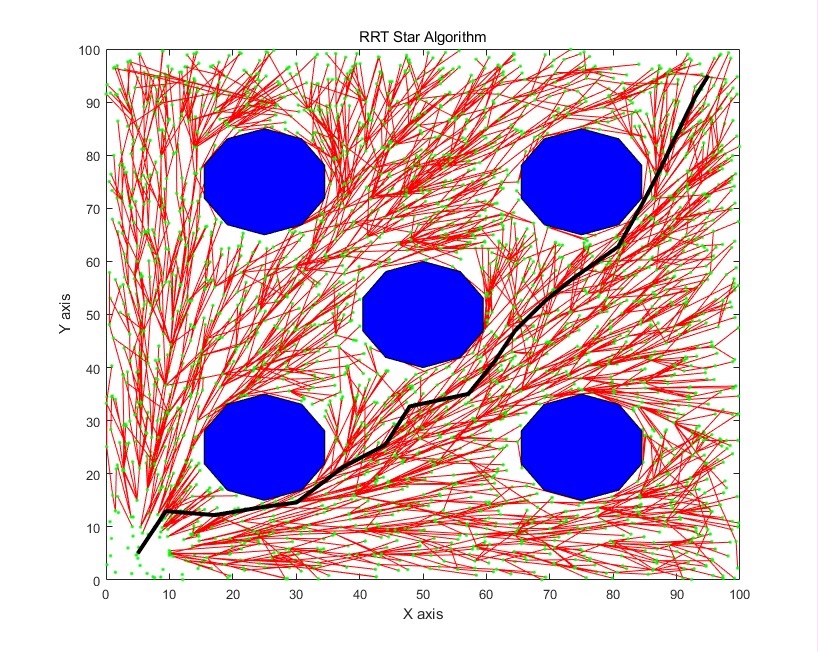
RRT算法是一种经典的路径规划算法,在二维场景中广泛应用于机器人导航和自动驾驶等领域。本文将介绍RRT算法的原理及其在路径规划与避障中的应用,以及基于MATLAB的RRT算法程序。
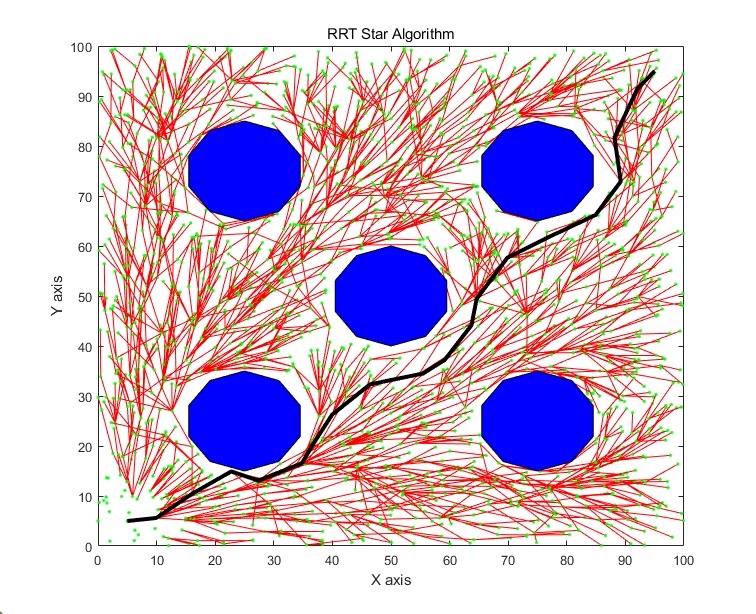
路径规划是指在给定起点和终点的情况下,寻找一条合适的路径使得机器人或车辆能够从起点到达终点。但在实际应用中,往往会有各种障碍物存在,这就给路径规划增加了一定的难度。RRT算法通过不断随机采样和扩展,快速探索出一棵树,从而找到一条从起点到终点的路径。它采用随机选择的方式,不断生成新的节点,并连接到最近的已有节点上,直到找到一条连接起点和终点的路径。
RRT算法具有以下几个关键步骤:
-
初始化RRT树:首先,需要创建一个只包含起点的树。
-
随机采样:在工作空间中随机采样一个点,作为新节点。
-
选择最近节点:根据欧氏距离或其他距离度量方式,找到已有树中距离新节点最近的节点。
-
扩展:将新节点与最近节点进行连接,并将新节点加入树中。
-
判断终止条件:当新节点接近终点时,可以判断路径已找到。
-
重复上述步骤:不断重复上述步骤,直到找到一条连接起点和终点的路径。
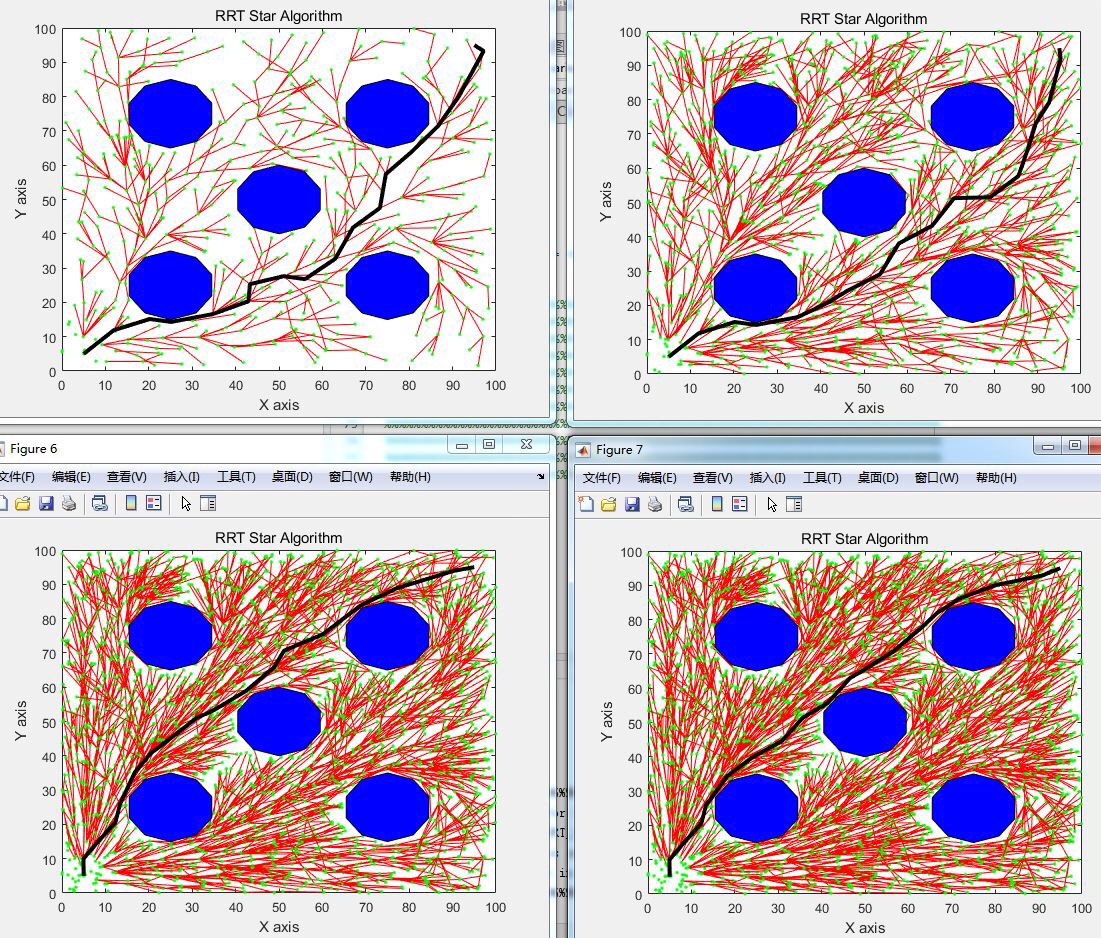
通过以上步骤,RRT算法可以快速探索出一条路径,并避开障碍物。该算法的优点在于它对障碍物不敏感,能够很好地适应复杂环境下的路径规划问题。
在MATLAB中实现RRT算法的程序包,可以帮助开发者更好地理解和应用该算法。该程序包基于随机采样的路径规划,具有快速探索随机树路径规划的特点。程序中包含了简单的英文注释,方便开发者理解代码逻辑和实现细节。
总之,RRT算法是一种有效的路径规划算法,在二维场景中具有广泛的应用。通过随机采样和树的扩展,RRT算法能够快速找到起点到终点的路径,并避开障碍物。MATLAB程序包提供了该算法的具体实现,方便开发者在实际应用中使用和改进。希望该算法能够为路径规划与避障领域的研究和应用带来更多的可能性。
【相关代码,程序地址】:http://fansik.cn/734131848594.html

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









