






 本文详细介绍了三菱FX3U三轴标准程序,包括轴点动、回零、定位、主控与复位程序、手动模式、生产计数及I/O通讯模块等内容,帮助读者理解机器人控制编程和应用技巧。
本文详细介绍了三菱FX3U三轴标准程序,包括轴点动、回零、定位、主控与复位程序、手动模式、生产计数及I/O通讯模块等内容,帮助读者理解机器人控制编程和应用技巧。
三菱FX3U三轴标准程序,包含轴点动,回零,相对与绝对定位,整个项目的模块都有:主控程序,复位程序,手动,生产计数,只要弄明白这个程序,就可以非常了解整个项目的程序如何去编写,从哪里开始下手,可提供程序问题解答,程序流程清晰明了;程序还包含与机器人I O通讯模块程序,子程序调

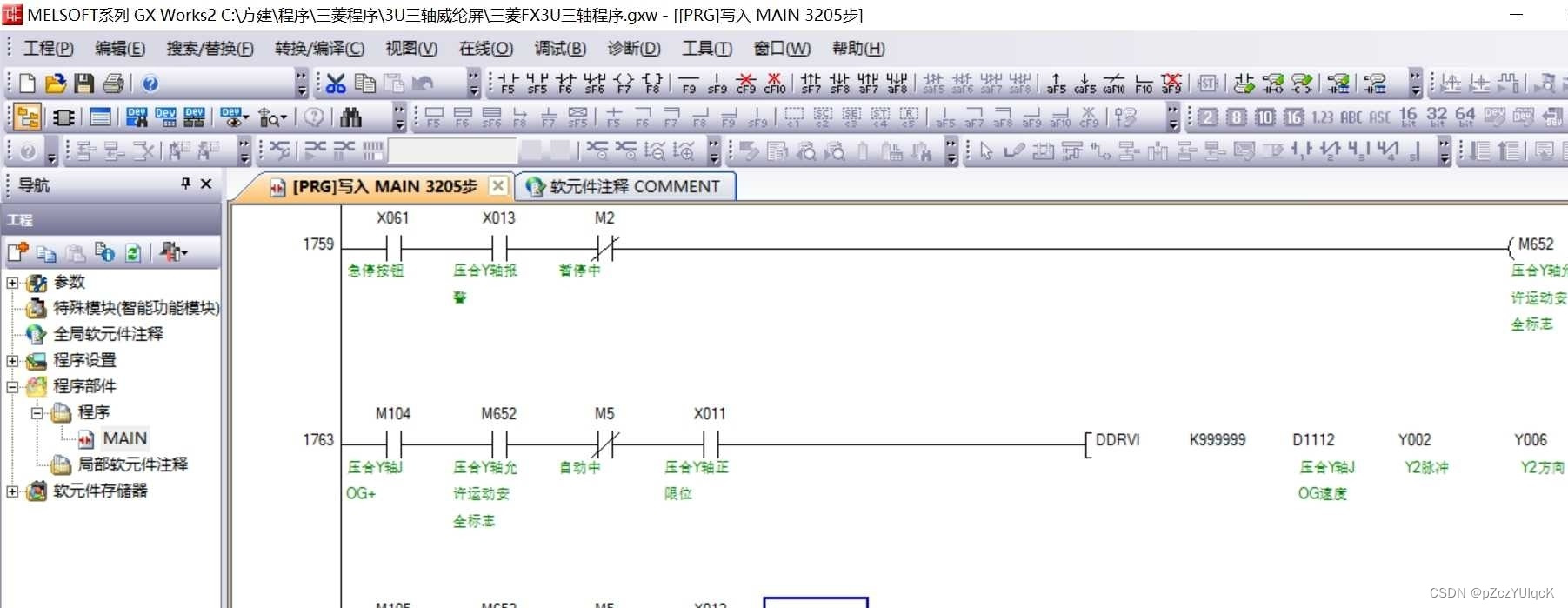
用指令程序,串口通讯,以及与伺服驱动器通讯等等。通过对这个程序的学习和分析,可以深入了解三菱FX3U在机器人控制中的应用。
首先,我们来看一下主控程序。主控程序是整个项目的核心,负责协调各个模块之间的工作。它主要包含了轴点动、回零以及相对与绝对定位等功能。轴点动功能可以让机器人在某一个轴上进行小幅度的移动,以达到精确定位的目的。回零功能则是将机器人的各个轴回到初始位置,以便进行下一次的工作。而相对与绝对定位功能则可以让机器人按照指定的坐标进行移动,实现精确的定位。
其次,我们来看一下复位程序。复位程序是在机器人出现异常情况时进行的操作,它可以将机器人恢复到初始状态,以保证机器人的正常工作。复位程序主要包含了各个轴的回零操作,以及对其他模块的初始化操作。在复位程序中,我们需要注意各个轴的回零顺序,以及初始化操作的先后顺序,以确保机器人能够正常复位。
此外,手动模式也是整个项目中的重要部分。手动模式可以让操作人员通过控制面板手动控制机器人的运动,以便进行调试和测试。手动模式主要包含了机器人各个轴的手动控制指令,以及相应的运动控制算法。通过手动模式,我们可以对机器人的各个运动参数进行调整,以达到最佳的运动效果。
另外,生产计数也是整个项目中的重要功能之一。生产计数功能可以对机器人的生产数量进行计数,以便统计和管理。生产计数功能主要包含了对计数器的初始化和累加操作,以及对计数结果的显示和保存操作。通过生产计数功能,我们可以准确地统计机器人的生产数量,为生产管理提供依据。
最后,该程序还包含了与机器人I/O通讯模块的程序。机器人I/O通讯模块负责与机器人的输入输出设备进行通讯,以实现各种功能。该模块包含了串口通讯部分、子程序调用部分以及与伺服驱动器通讯部分等。通过该模块,我们可以实现与其他设备的数据交换和控制,以满足机器人在不同应用场景下的需求。
综上所述,三菱FX3U三轴标准程序包含了多个模块,每个模块都扮演着重要的角色。通过对这个程序的学习和分析,我们可以深入了解三菱FX3U在机器人控制中的应用。同时,该程序还提供了问题解答和流程清晰明了等优点,方便我们理解和使用。通过对该程序的学习和应用,我们可以更好地掌握机器人控制的技术,为实际应用提供支持和指导。
在使用三菱FX3U三轴标准程序时,我们需要注意各个模块之间的协调和调试。同时,我们还需要根据具体应用场景进行相应的参数调整和优化。通过不断地学习和实践,我们可以逐步提高自己在机器人控制方面的技术水平,为实际应用提供更好的解决方案。
综上所述,三菱FX3U三轴标准程序是一个在机器人控制中应用广泛的程序。通过对该程序的学习和分析,我们可以深入了解三菱FX3U在机器人控制中的应用。同时,该程序还提供了问题解答和流程清晰明了等优点,方便我们理解和使用。通过对该程序的学习和应用,我们可以更好地掌握机器人控制的技术,为实际应用提供支持和指导。
相关代码,程序地址:http://lanzouw.top/662372462636.html
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









