







| 实验4三阶控制系统的稳定性分析 | |||||||||||||||||||||||||
| 一、实验目的: 1、通过学习本实验内容,学生能够掌握高阶控制系统时域分析稳定性的方法; 2、了解劳斯稳定判据的应用。 | |||||||||||||||||||||||||
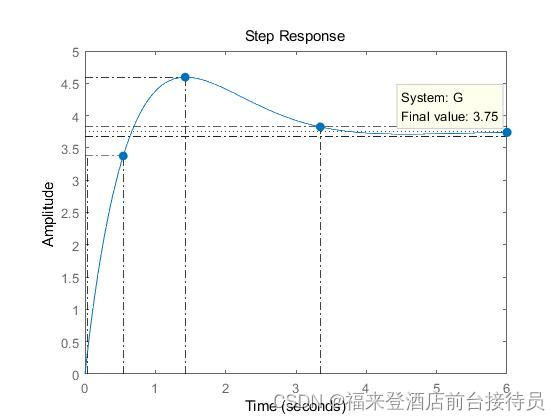
| 二、实验步骤: 1、已知三阶系统闭环传递函数为Φ(s)=10(s+1)(s+3)/(s+4)(s^2+2s+2), 求系统闭环极点及其单位阶跃响应,读取动态性能指标,填入表4-1中。
num=[10,40,30]; den=[1 ,6,10,8]; G=tf(num,den); p=pole(G) step(G,6) 代码结果: p = -4.0000 + 0.0000i -1.0000 + 1.0000i -1.0000 - 1.0000i
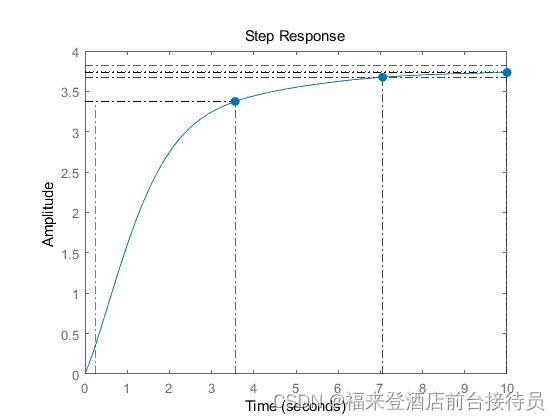
2、改变系统闭环极点的位置,Φ(s)=1.25(s+1)(s+3) /(s+0.5)(s^2+2s+2),将原极点s=-4改成s=-0.5,使闭环极点靠近虚轴,观察单位阶跃响应和动态性能指标变化。 2实验代码: num=[1.25,5,3.75]; den=[1 ,2.5,3,1]; G=tf(num,den); p=pole(G) step(G,10) 代码结果: p = -1.0000 + 1.0000i -1.0000 - 1.0000i -0.5000 + 0.0000i
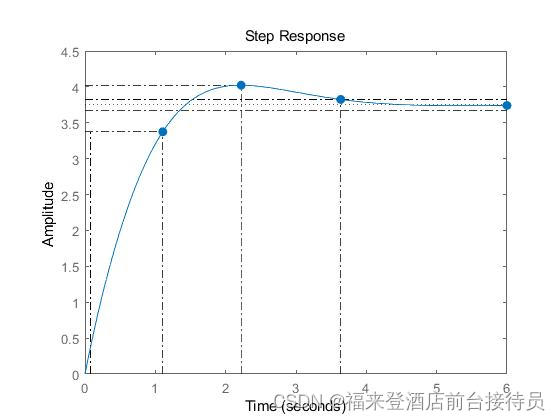
3.改变系统闭环零点的位置,将原零点z=-1改成z=-2,Φ(s)=5(s+2)(s+3)/(s+4)(s^2+2s+2),观察单位阶跃响应及其动态性能指标的变化。 3实验代码: num=[5,25,30]; den=[1 ,6,10,8]; G=tf(num,den); p=pole(G) step(G,6) 代码结果: p = -4.0000 + 0.0000i -1.0000 + 1.0000i -1.0000 - 1.0000i
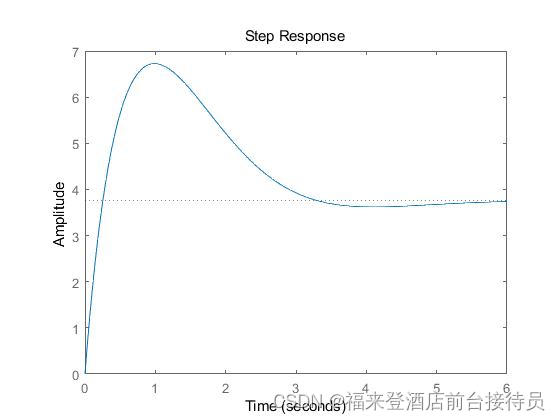
4.继续增加函数Φ(s)=20(s+0.5)(s+3)/(s+4)(s^2+2s+2),得到结果。 4实验代码: num=[20,70,30]; den=[1 ,6,10,8]; G=tf(num,den); p=pole(G) step(G,6) 代码结果: p = -4.0000 + 0.0000i -1.0000 + 1.0000i -1.0000 - 1.0000i
表4-1:高阶系统动态性能分析比较(▲=2%)
|
结论:
闭环系统极点越靠近虚轴,系统响应越慢。零点越远离虚轴,系统响应越慢。当零点靠近虚轴而极点远离虚轴时,系统响应变快。
我的其他专栏:


关注我了解更多



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











