







| 实验6 基于Matlab控制系统的根轨迹及其性能分析 | ||||||||||||||||||||||||||||
| 一、实验目的: 1、通过学习本实验内容,学生能够掌握使用 MATLAB绘制控制系统零极点图和根轨迹图的方法; 2、学会分析控制系统根轨迹的一般规律; 3、能够利用根轨迹图进行系统性能的分析; 4、研究闭环零极点对系统性能的影响。 | ||||||||||||||||||||||||||||
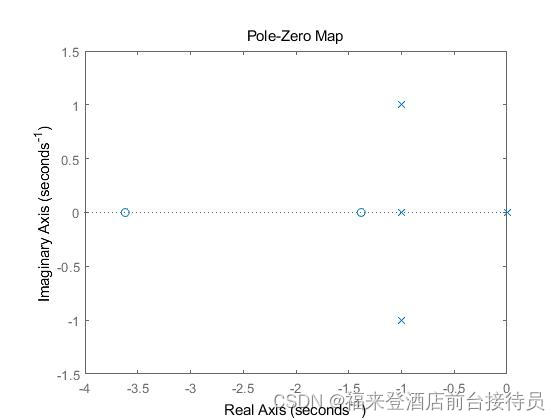
| 二、实验步骤: 1、绘制系统的零极点图 已知系统的开环传递函数G(s)H(s)=(s^2+5s+5)/s(s+1)(s^2+2s+2)绘制系统的零极点图,读取数据填入表6-1中,总结规律。 绘制系统的零极点图 代码: num=[1 5 5];den=[1 ,3 ,4, 2 ,0];sys=tf(num,den);figure;pzmap(sys) 零极点曲线
(用鼠标点击右键来查看参数) 表6-1 系统零极点图
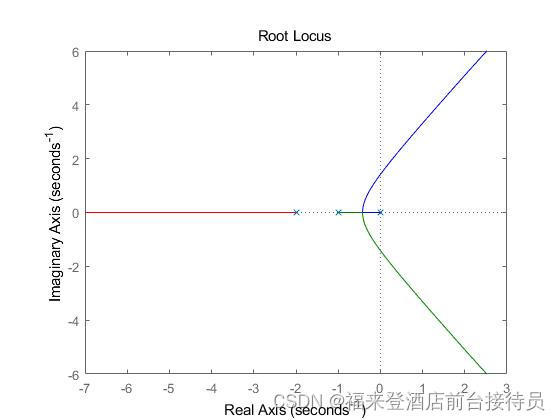
2、绘制控制系统的根轨迹图并分析根轨迹的一般规律 若已知系统开环传递函数G(s)H(s)= k/s(s+1)(s+2),绘制控制系统的根轨迹图,并完成填空: 代码: clear all; close all;num=[1];den=[1 3 2 0];sys=tf(num,den);rlocus(sys) 根轨迹曲线:
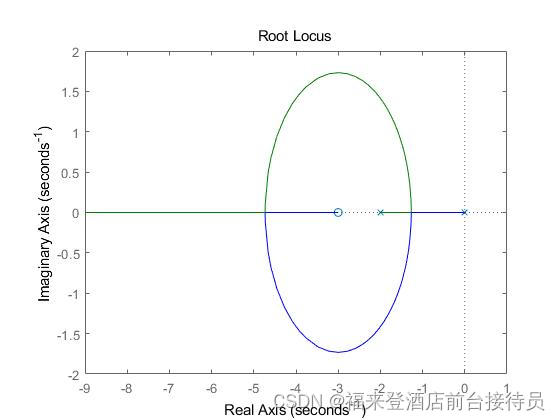
(1) 根轨迹有__ 3__条。 (2) 位于负实轴上的根轨迹(-∞,2)和(1,0)区段,其对应的阻尼ζ_____ 1_____,超调量为__ 0____,系统处于_ 临界阻尼 __状态,而且在远离虚轴的方向,随着增益K增大,振荡频率ω__ 增加___,系统动态相应衰减速率___增加 _____。 (3) 在根轨迹的分离点为___-0.423 ____,对应于阻尼ζ___1 ____,超调量为_0_ __,开环增益K=__ __,系统处于____ 临界阻尼_____状态。 (4) 根轨迹经过分离点后离开实轴,朝5右半平面运动。当根轨迹在分离点与虚轴这个区间时,闭环极点由___ -0.423____变为____0 ____,对应阻尼0<ζ<1,系统处于__ _欠阻尼___状态,其动态响应将出现__减幅_ ___振荡,而且越靠近虚轴,增益K越大,阻尼越小,超调量_ 增加 _,振荡频率ω__增加 __。 (5) 当根轨迹与虚轴相交时,闭环根位于虚轴上,闭环极点是一对纯虚根__+1.41i,-1.41i_ ____,阻尼___0 ___,超调量达到__100% ____,系统处于___ 临界阻尼___状态,其动态响应将出现__ 等幅____振荡。此时称为临界稳定增益K2=_ __6___。 3、根据控制系统的根轨迹,分析控制系统的性能。 已知一负反馈系统的开环传递函数为G(s)H(s)= k(s+3)/s(s+2)
(1)使用代码: clear all; close all;num=[1 3];den=[1 2 0];sys=tf(num,den);rlocus(sys) 得到根轨迹图:
【鼠标右键点击,增益(gain),极点(pole),阻尼比(damping),超调量(overshoot),频率(frequency)】 (2)确定系统呈现欠阻尼状态时的开环增益范围。 0.536<k<7.46 (3)确定系统最小阻尼比时的闭环极点。 Z=0时的阻尼比最小 我的其他专栏: 关注我了解更多 |




















评论

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言
查看更多评论
添加红包










