






目录
一、二叉搜索树
二叉搜索树,又称二叉排序树(Binary Search Tree),相比于普通二叉树,BST的特性有:
- 若它的左子树不为空,则左子树上所有节点的值都小于根节点的值
- 若它的右子树不为空,则右子树上所有节点的值都大于根节点的值
- 它的左右子树也分别为二叉搜索树

二叉搜索树通常在数据插入的时候便会将数据正确排序(不允许插入重复值),这样在进行数据查询的时候,一般情况下时间复杂度是,但是如果插入的数据为一个有序或接进有序的序列,即退化成了单支树,这时时间复杂度退化到
。
二、AVL树
AVL树也叫平衡二叉搜索树,是二叉搜索树的进化版,设计是原理是弥补二叉搜索树的缺陷:当插入的数据接近于有序数列时,二叉搜索树的性能严重下降。
AVL的节点设计采用三叉链结构(每个节点包含left, right, parent三个节点指针),每个节点中都有平衡因子bf。
AVL树在BST的基础上引入了一个平衡因子bf用于表示左右子树的高度差,并控制其不超过1,若在数据插入时左右子树的高度差超过1了,AVL树会寻找新的节点作为根节点进行调整树的结构,这样AVL树进行数据查询的时间复杂度就稳定在了。
AVL的特点是左子树和右子树高度差 < 2,平衡因子bf就是右子树高度 - 左子树高度的差,当bf等于2或-2时,AVL将根据不同情况进行旋转调节,使其始终保持AVL树的特性。
对于一棵AVL树,若它的节点数为n,则它的深度为。
2.1 左单旋
若数列 1,2,3 按顺序插入AVL树,则树的结构为图1:
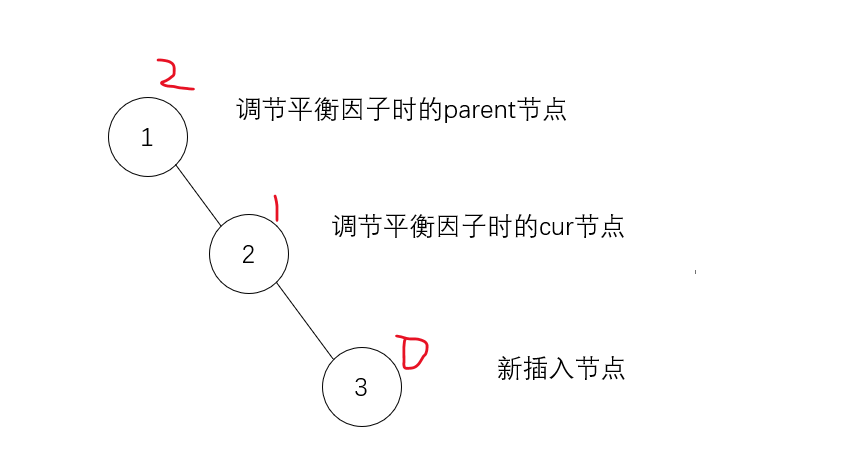
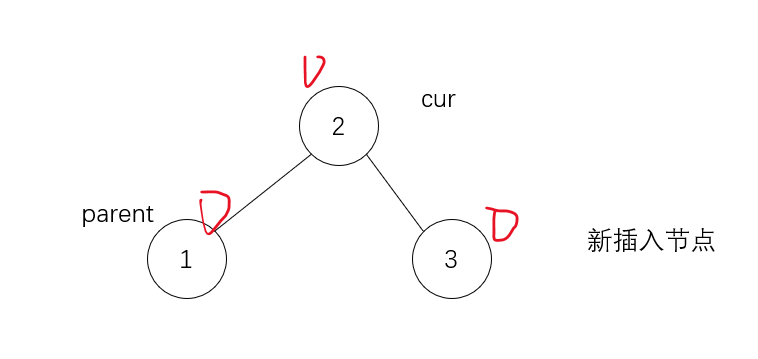
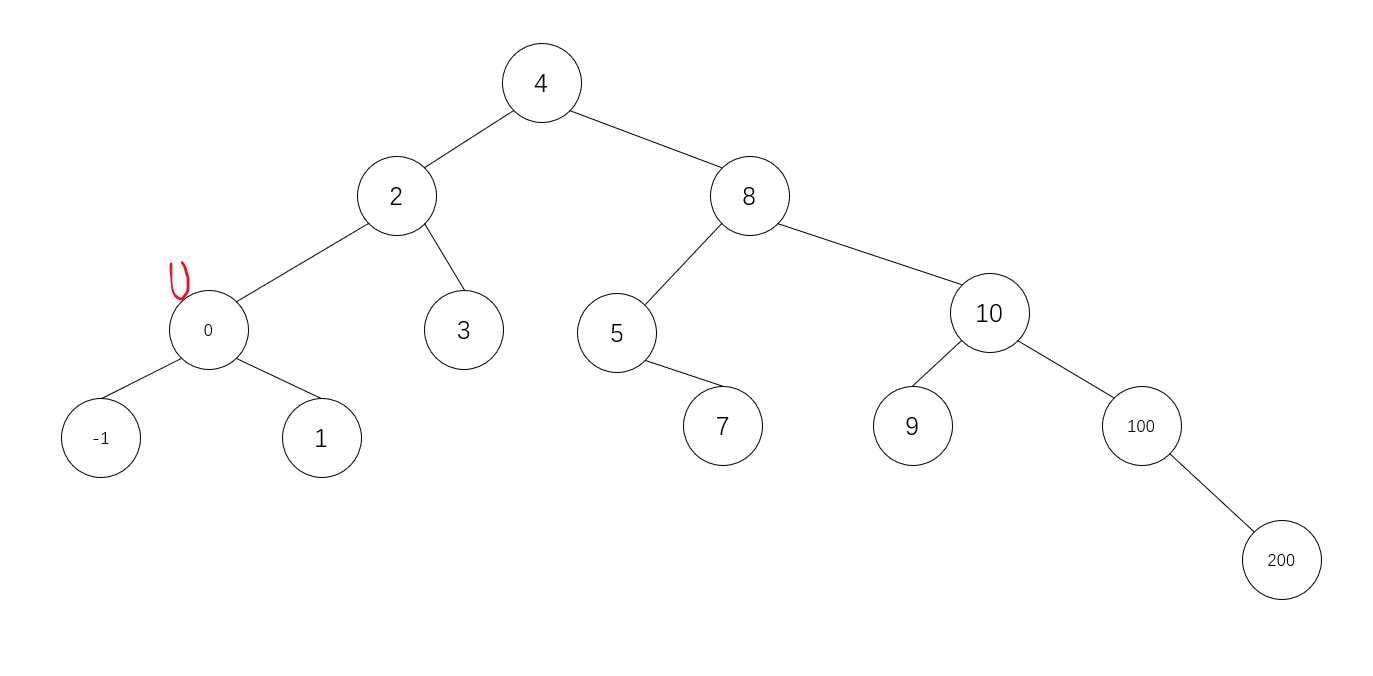
图1 中,parent节点的平衡因子bf为2,新节点向上调节时的cur节点的平衡因子为1,这种情况需要左单旋:cur节点的左子树(空)变成parent节点的右子树,parent节点变成cur节点的左子树。
2.2 右单旋
右单旋与左单旋类似,也是根据平衡因子情况进行旋转调整。
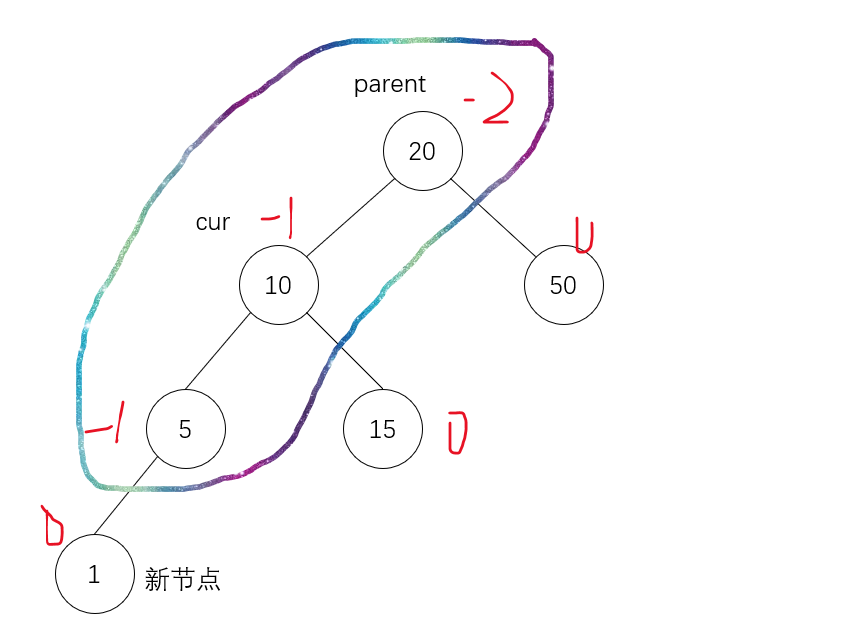
图1 新节点1插入,向上调整平衡因子,出现parent->bf == -2, cur->bf == -1,此时需要右单旋:cur节点的右子树变为parent节点的左子树,parent变成cur节点的右子树。
2.3 左右双旋
左右双旋在设计上可以调用左单旋和右单旋函数,但是需要不同情况讨论旋转后的平衡因子。
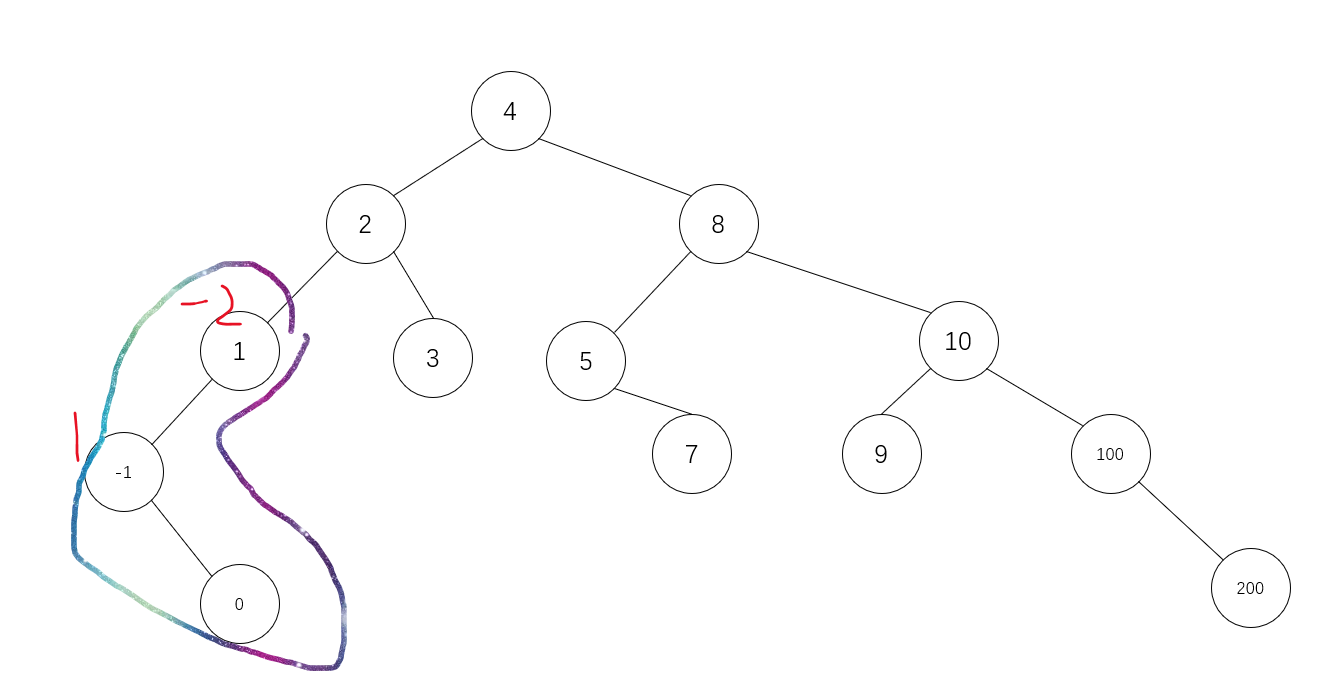
图1 新插入节点0后,parent->bf == -2, cur->bf == 1,此时需要左右双旋,即先以节点-1为父节点进行一次左单旋,再以1为父节点进行一次左单旋:节点0的左子树(空)变成节点-1的左子树,节点-1变成节点0的左子树。
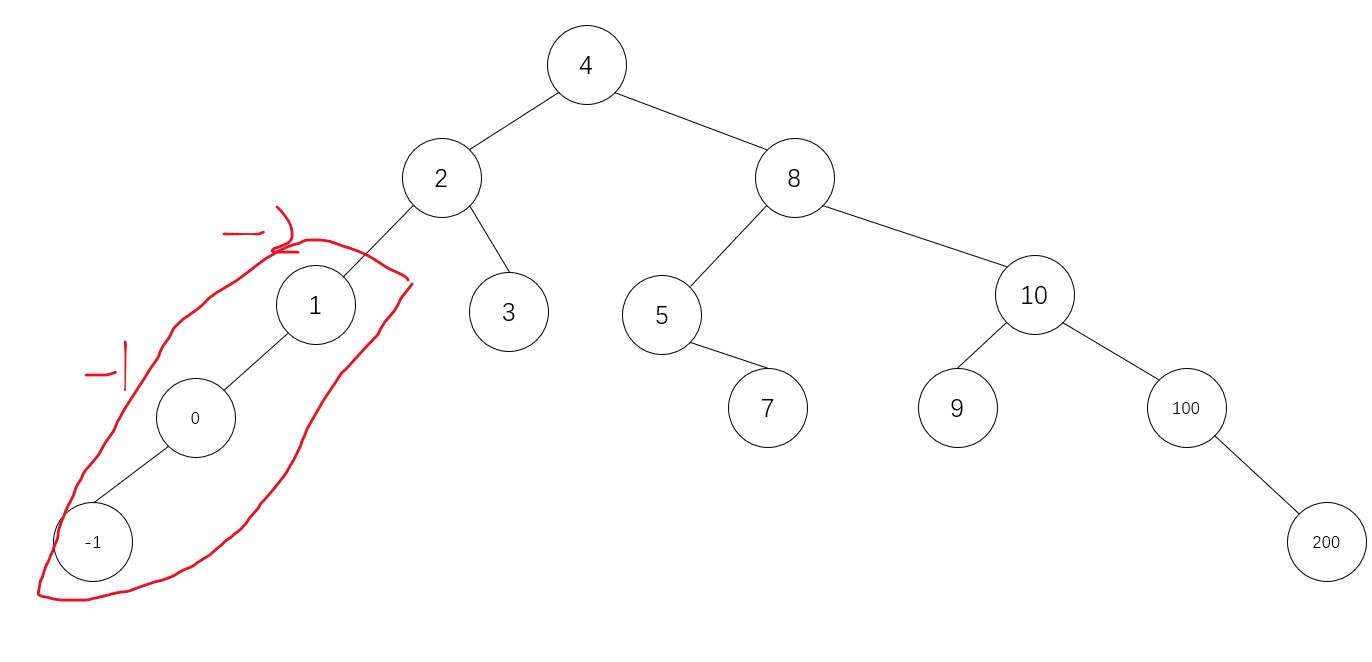
图2 完成左单旋之后再以1位父节点进行一次右单旋:节点0的右子树(空)变成节点1的左子树,节点1变成节点0的右子树。
2.4 右左双旋
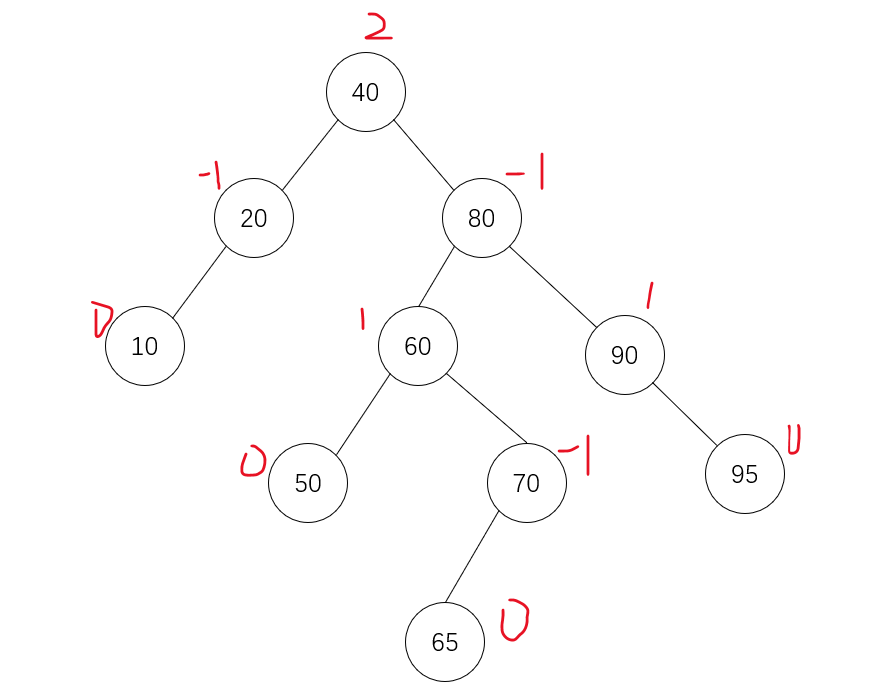
图1 中红色数字就是每个节点平衡因子,值为65的节点是新插入的节点,当其插入之后,所有节点的平衡因子更新,出现了parent平衡因子为2,cur平衡因子为1,此时需要进行旋转调节。
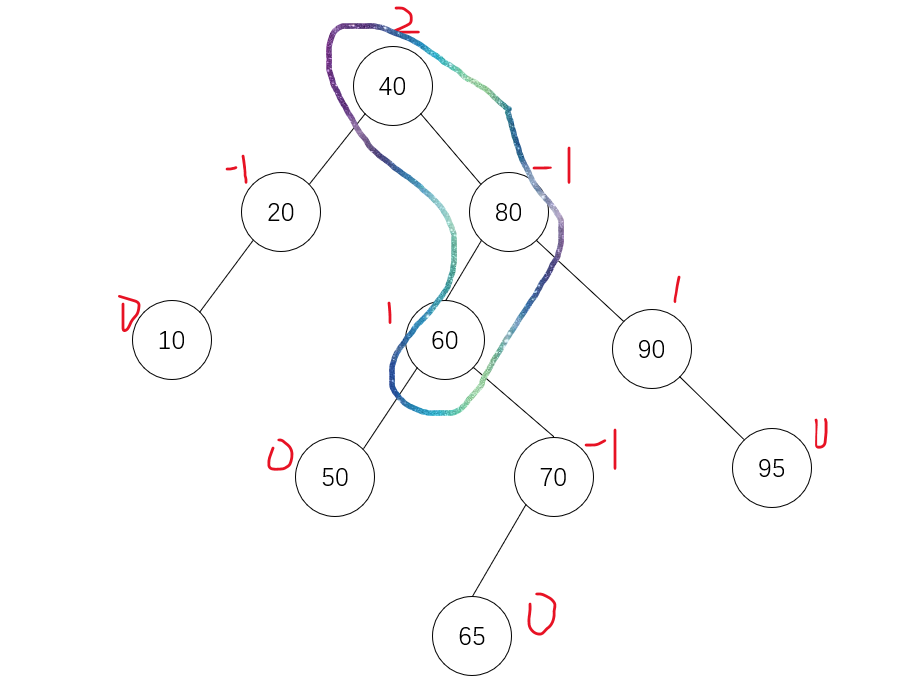
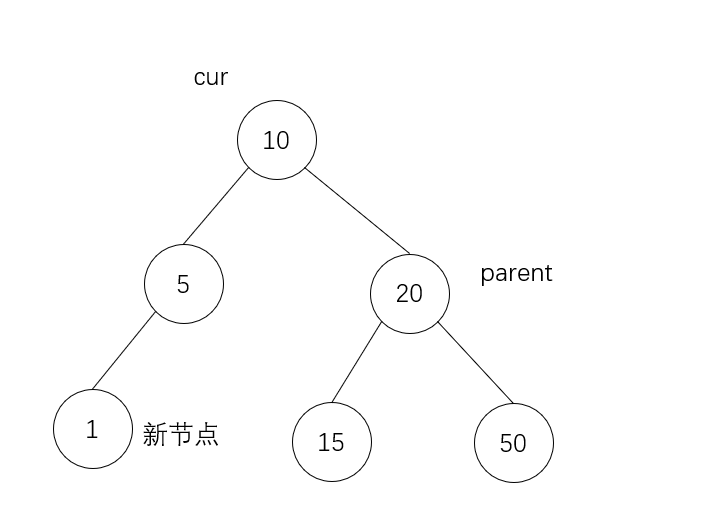
图2 观察平衡因子,决定旋转策略为右左双旋,即先进行一次右单旋,再进行一次左单旋。右单旋是以节点80为父节点进行,即节点60的右子树变成节点80的左子树,节点80变成节点60的右子树。
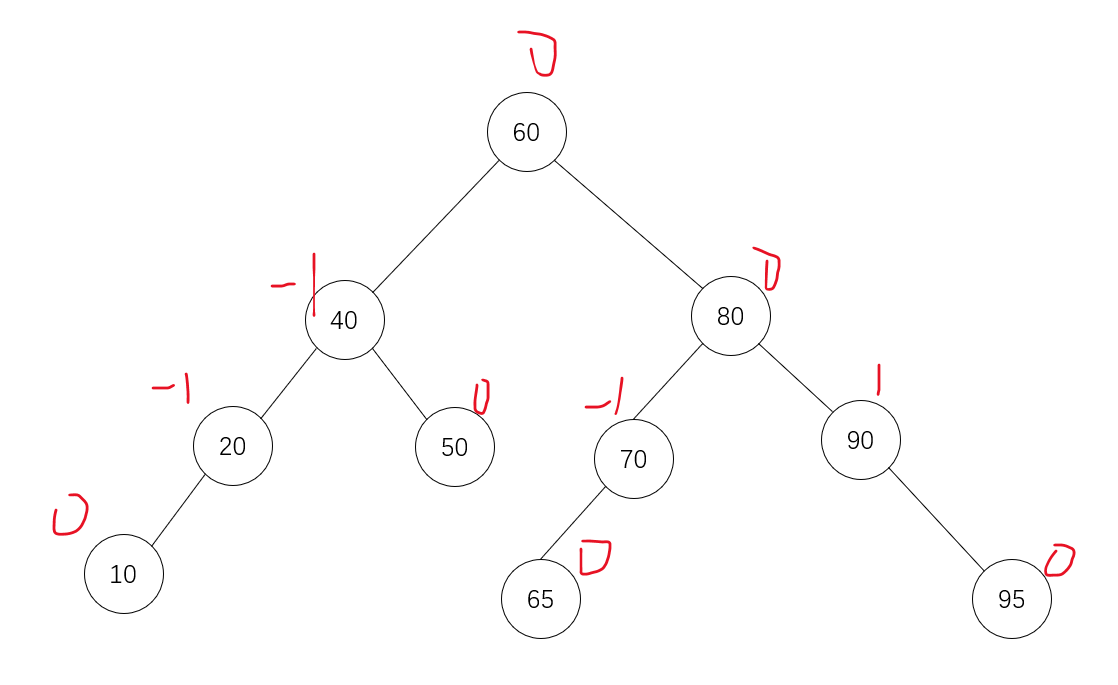
图3 右单旋结束,接下来再一次进行以节点40为父节点的左单旋,即节点60的左子树变成节点40的右子树,节点40变成节点60的左子树。
三、AVL.h
#define _CRT_SECURE_NO_WARNINGS 1
#pragma once
#include <iostream>
template<class K, class V>
struct AVLTreeNode
{
std::pair<K, V> kv;
AVLTreeNode* parent;
AVLTreeNode* left;
AVLTreeNode* right;
int bf;
AVLTreeNode(const std::pair<K, V> x)
: kv(x), parent(nullptr), left(nullptr), right(nullptr), bf(0)
{}
};
template<class K, class V>
class AVLTree
{
typedef AVLTreeNode<K, V> Node;
public:
bool Insert(const std::pair<K, V>& x)
{
if (_root == nullptr)
{
_root = new Node(x);
return true;
}
// 通过二叉搜索树找到需要插入节点的位置
Node* parent = nullptr;
Node* cur = _root;
while (cur)
{
parent = cur;
if (cur->kv.first < x.first)
cur = cur->right;
else if (cur->kv.first > x.first)
cur = cur->left;
else
return false;
}
cur = new Node(x);
cur->parent = parent;
if (parent->kv.first > x.first)
parent->left = cur;
else
parent->right = cur;
// 更新平衡因子
while (parent)
{
if (parent->left == cur)
--parent->bf;
else
++parent->bf;
if (parent->bf == 0)
{
return true;
}
else if (parent->bf == 1 || parent->bf == -1)
{
// 继续向上更新
cur = parent;
parent = parent->parent;
}
else if (parent->bf == 2 || parent->bf == -2)
{
if (parent->bf == 2 && cur->bf == 1)
_RotateLeft(parent);
else if (parent->bf == -2 && cur->bf == -1)
_RotateRight(parent);
else if (parent->bf == -2 && cur->bf == 1)
_RotateLeftRight(parent);
else if (parent->bf == 2 && cur->bf == -1)
_RotateRightLeft(parent);
break;
}
}
}
void InOrder()
{
_InOrder(_root);
std::cout << std::endl;
}
bool IsBalance()
{
return _IsBalance(_root);
}
private:
void _RotateLeft(Node* parent)
{
Node* subR = parent->right;
Node* subRL = subR->left;
parent->right = subRL;
if (subRL != nullptr)
subRL->parent = parent;
subR->left = parent;
Node* ppNode = parent->parent;
parent->parent = subR;
if (ppNode == nullptr)
{
_root = subR;
_root->parent = nullptr;
}
else
{
if (ppNode->left == parent)
ppNode->left = subR;
else
ppNode->right = subR;
subR->parent = ppNode;
}
parent->bf = subR->bf = 0;
}
void _RotateRight(Node* parent)
{
Node* subL = parent->left;
Node* subLR = subL->right;
parent->left = subLR;
if (subLR != nullptr)
subLR->parent = parent;
subL->right = parent;
Node* ppNode = parent->parent;
parent->parent = subL;
if (ppNode == nullptr)
{
_root = subL;
_root->parent = nullptr;
}
else
{
if (ppNode->left == parent)
ppNode->left = subL;
else
ppNode->right = subL;
subL->parent = ppNode;
}
parent->bf = subL->bf = 0;
}
void _RotateLeftRight(Node* parent)
{
Node* subL = parent->left;
Node* subLR = subL->right;
int bf = subLR->bf;
_RotateLeft(subL);
_RotateRight(parent);
if (bf == 0)
{
subLR->bf = 0;
subL->bf = 0;
parent->bf = 0;
}
else if (bf == -1)
{
subLR->bf = 0;
subL->bf = 0;
parent->bf = 1;
}
else if (bf == 1)
{
subLR->bf = 0;
subL->bf = -1;
parent->bf = 0;
}
}
void _RotateRightLeft(Node* parent)
{
Node* subR = parent->right;
Node* subRL = subR->left;
int bf = subRL->bf;
_RotateRight(subR);
_RotateLeft(parent);
if (bf == 0)
{
subRL->bf = 0;
subR->bf = 0;
parent->bf = 0;
}
else if (bf == -1)
{
subRL->bf = 0;
subR->bf = 1;
parent->bf = 0;
}
else if (bf == 1)
{
subRL->bf = 0;
subR->bf = 0;
parent->bf = -1;
}
}
void _InOrder(Node* root)
{
if (root == nullptr)
return;
_InOrder(root->left);
std::cout << "<" << root->kv.first << "," << root->kv.second << ">" << " ";
_InOrder(root->right);
}
int _Height(Node* root)
{
if (root == nullptr)
return 0;
int leftHeight = _Height(root->left);
int rightHeight = _Height(root->right);
return leftHeight > rightHeight ? leftHeight + 1 : rightHeight + 1;
}
bool _IsBalance(Node* root)
{
if (root == nullptr)
return true;
int leftHeight = _Height(root->left);
int rightHeight = _Height(root->right);
if (rightHeight - leftHeight != root->bf)
{
std::cout << "平衡因子异常" << std::endl;
return false;
}
return abs(rightHeight - leftHeight) < 2
&& _IsBalance(root->left)
&& _IsBalance(root->right);
}
private:
Node* _root = nullptr;
};
四、test.cpp
#define _CRT_SECURE_NO_WARNINGS 1
#include "AVL.h"
void Test1()
{
int a[] = { 2, 4, 5, 8, 10, 1, 3, 5, 7, 9, 100, 200, -100, 0 };
AVLTree<int, int> t;
for (auto e : a)
{
t.Insert(std::make_pair(e, e * 2));
}
t.InOrder();
std::cout << t.IsBalance() << std::endl << std::endl;
}
void Test2()
{
int a[] = { 16, 3, 7, 11, 9, 26, 18, 14, 15 };
AVLTree<int, int> t;
for (auto e : a)
{
t.Insert(std::make_pair(e, e * 2));
}
t.InOrder();
std::cout << t.IsBalance() << std::endl << std::endl;
}
void Test3()
{
int a[] = { 4, 2, 6, 1, 3, 5, 15, 7, 16, 14 };
AVLTree<int, int> t;
for (auto e : a)
{
t.Insert(std::make_pair(e, e * 2));
}
t.InOrder();
std::cout << t.IsBalance() << std::endl << std::endl;
}
int main()
{
Test1();
Test2();
Test3();
return 0;
}















 990
990











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











