






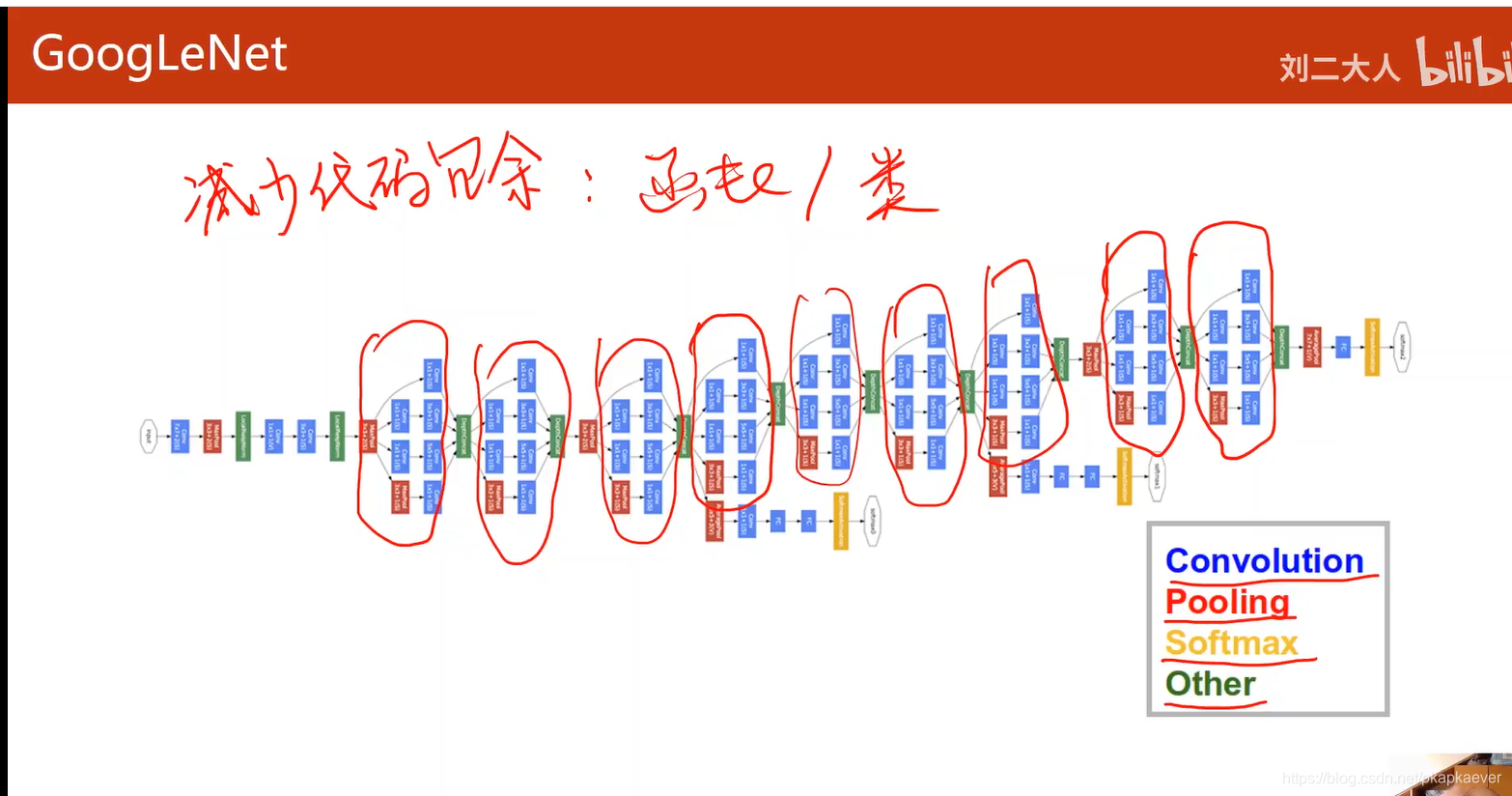
1.这个红圈圈画的块叫做Inception
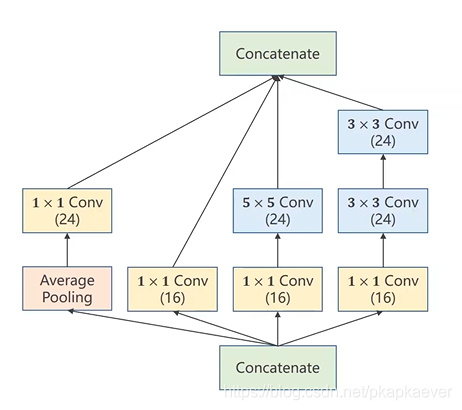
2.concatenate就是将块拼接起来(长宽一样 channel不同)
3.Average pooling 人为指定stride =1,padding = 1(均值卷积核)
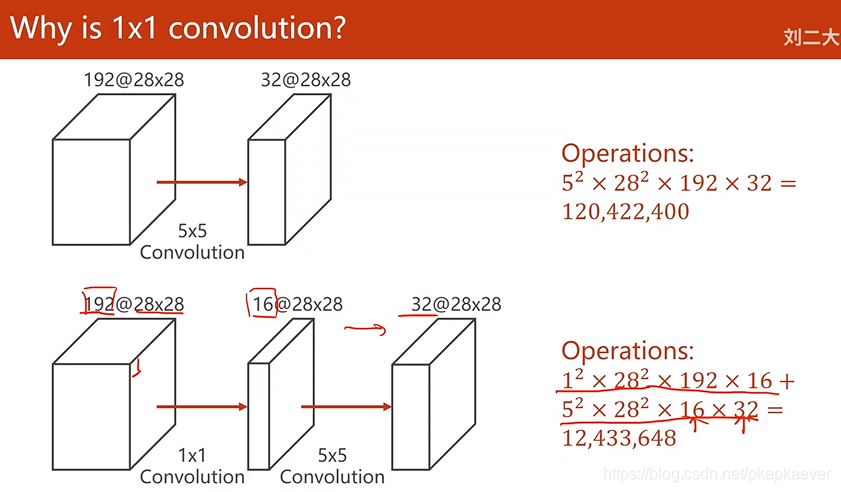
4.1*1卷积 表示卷积核也是1*1,可以融合不同通道相同位置像素的值,也就是信息融合
Inception module实现
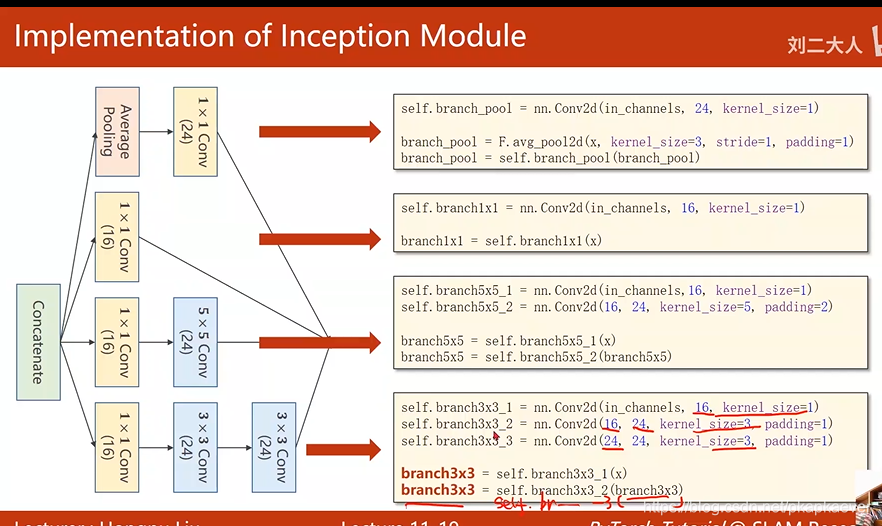
沿着channel的维度拼接起来 (dim = 1)

import torch
from torch.utils.data import DataLoader
from torchvision import transforms
from torchvision import datasets
import torch.nn.functional as F
import matplotlib.pyplot as plt
import torch.nn as nn
import time
import datetime
batch_size =64
transform = transforms.Compose([transforms.ToTensor(), transforms.Normalize((0.1307, ), (0.3081, ))])
#将原始像素数据归一到(0,1)中 并基于均值0.1307和标准差0.3081来对数据进行标准化处理
train_dataset = datasets.MNIST(root='../dataset/mnist', train=True, download=True,transform=transform)
train_loader = DataLoader(train_dataset, shuffle=True,batch_size=batch_size)
#(下载)加载训练集,之后进行batch分组
test_dataset = datasets.MNIST(root='../dataset/mnist', train=False,download=True,transform=transform)
test_loader = DataLoader(test_dataset,shuffle=False ,batch_size=batch_size)
#测试集
class InceptionA(nn.Module):
def __init__(self, in_channels):
super(InceptionA, self).__init__()
self.branch1x1 = nn.Conv2d(in_channels, 16, kernel_size=1)
#1x1
self.branch5x5_1 = nn.Conv2d(in_channels, 16, kernel_size=1)
self.branch5x5_2 = nn.Conv2d(16, 24, kernel_size=5, padding=2)
#1x1 5x5
self.branch3x3_1 = nn.Conv2d(in_channels, 16, kernel_size=1)
self.branch3x3_2 = nn.Conv2d(16, 24, kernel_size=3, padding=1)
self.branch3x3_3 = nn.Conv2d(24, 24, kernel_size=3, padding=1)
#1x1 3x3 3x3
self.branch_pool = nn.Conv2d(in_channels, 24, kernel_size=1)
#1x1
def forward(self,x):
branch1x1 = self.branch1x1(x)
branch5x5 = self.branch5x5_1(x)
branch5x5 = self.branch5x5_2(branch5x5)
branch3x3 = self.branch3x3_1(x)
branch3x3 = self.branch3x3_2(branch3x3)
branch3x3 = self.branch3x3_3(branch3x3)
branch_pool = F.avg_pool2d(x, kernel_size=3, stride=1, padding=1)
branch_pool = self.branch_pool(branch_pool)
outputs = [branch1x1, branch5x5, branch3x3, branch_pool]
return torch.cat(outputs, dim=1) #shape: batch_size x C x H x W (经过一次Inception变换C=88)
class Net(nn.Module):
def __init__(self):
super(Net, self).__init__()
self.conv1 = nn.Conv2d(1, 10, kernel_size=5)
self.conv2 = nn.Conv2d(88, 20, kernel_size=5)
self.incep1 = InceptionA(in_channels=10)
self.incep2 = InceptionA(in_channels=20)
self.mp = nn.MaxPool2d(2)
self.fc = nn.Linear(1408, 10)
def forward(self,x):
in_seze = x.size(0)
x = F.relu(self.mp(self.conv1(x))) #输出通道数为10
x = self.incep1(x) #输出通道数为88
x = F.relu(self.mp(self.conv2(x))) #输出通道数为20
x = self.incep2(x) #输出通道数为88
x = x.view(in_seze, -1)
x = self.fc(x)
return x
model= Net()
device = torch.device('cuda:0' if torch.cuda.is_available() else 'cpu')#设置GPU
model.to(device)#将数据加载到GPU
#---计算损失和更新
criterion = torch.nn.CrossEntropyLoss()#交叉熵size_average=False
optimizer = torch.optim.SGD(model.parameters(), lr = 0.01, momentum=0.5)#, momentum=0.5
#---计算损失和更新
def train(epoch):
running_loss = 0.0 #计算loss的累积
#num = []
#loss_list = []
for batch_idx, data in enumerate(train_loader, 0):
inputs, target = data
inputs, target = inputs.to(device), target.to(device)#将数据加载到GPU
optimizer.zero_grad()
#forward + backward + update
outputs = model(inputs)
loss = criterion(outputs, target)
loss.backward()
optimizer.step()
running_loss += loss.item()
if batch_idx % 300 == 299:#每训练300个数据输出一次
print('[%d, %5d] loss: %.3f' % (epoch + 1, batch_idx + 1, running_loss / 2000))
running_loss = 0.0
'''num.append(batch_idx)
loss_list.append(loss.item())
plt.plot(num, loss_list)
plt.xlabel('num')
plt.ylabel('loss')
plt.show() # 绘图'''
def test():
correct = 0
total = 0
with torch.no_grad():#不计算梯度
for data in test_loader:
images, labels = data
images, labels = images.to(device), labels.to(device)#将数据加载到GPU
outputs = model(images)
_, predicted = torch.max(outputs.data, dim=1)
total += labels.size(0)
correct += (predicted == labels).sum().item()
print('Accuracy on test set: %d %% [%d/%d]' % (100 * correct / total, correct, total))
return correct / total
if __name__ == '__main__':
time_start = time.time() # 开始计时
Accurancy = []
epoch_list = []
for epoch in range(10):
train(epoch)
#test()
Accurancy.append(test())
epoch_list.append(epoch)
time_end = time.time() # 结束计时
print(datetime.timedelta(seconds= (time_end - time_start)))
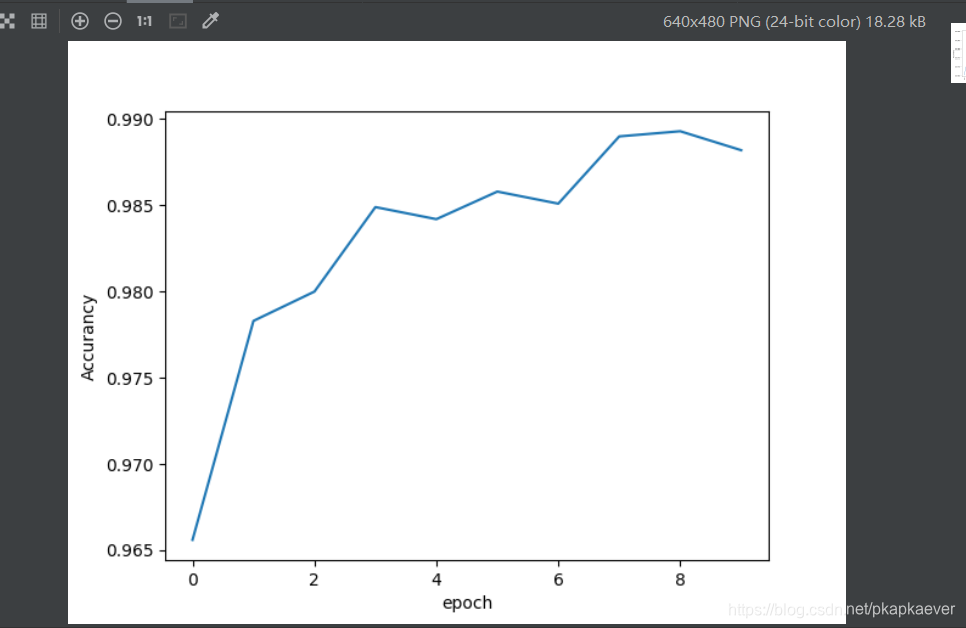
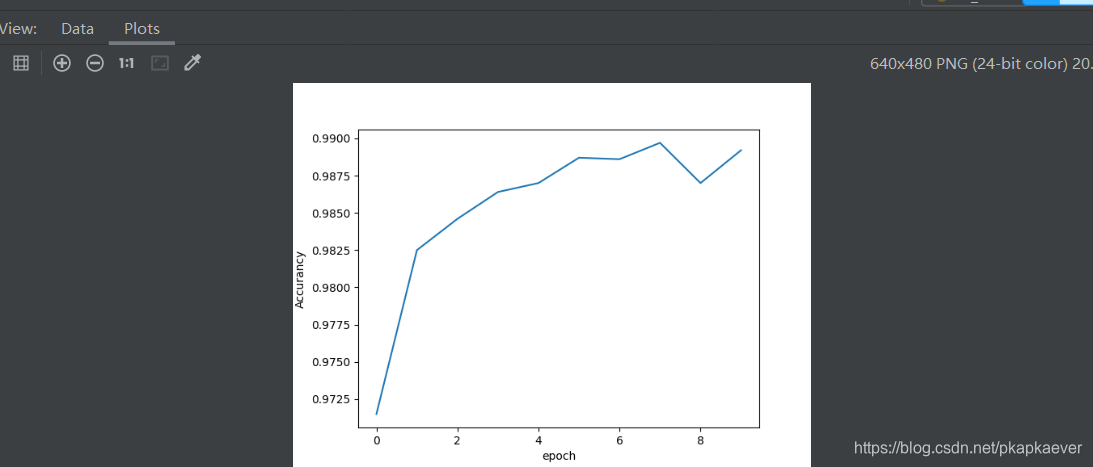
plt.plot(epoch_list, Accurancy)
plt.xlabel('epoch')
plt.ylabel('Accurancy')
plt.show()#绘图
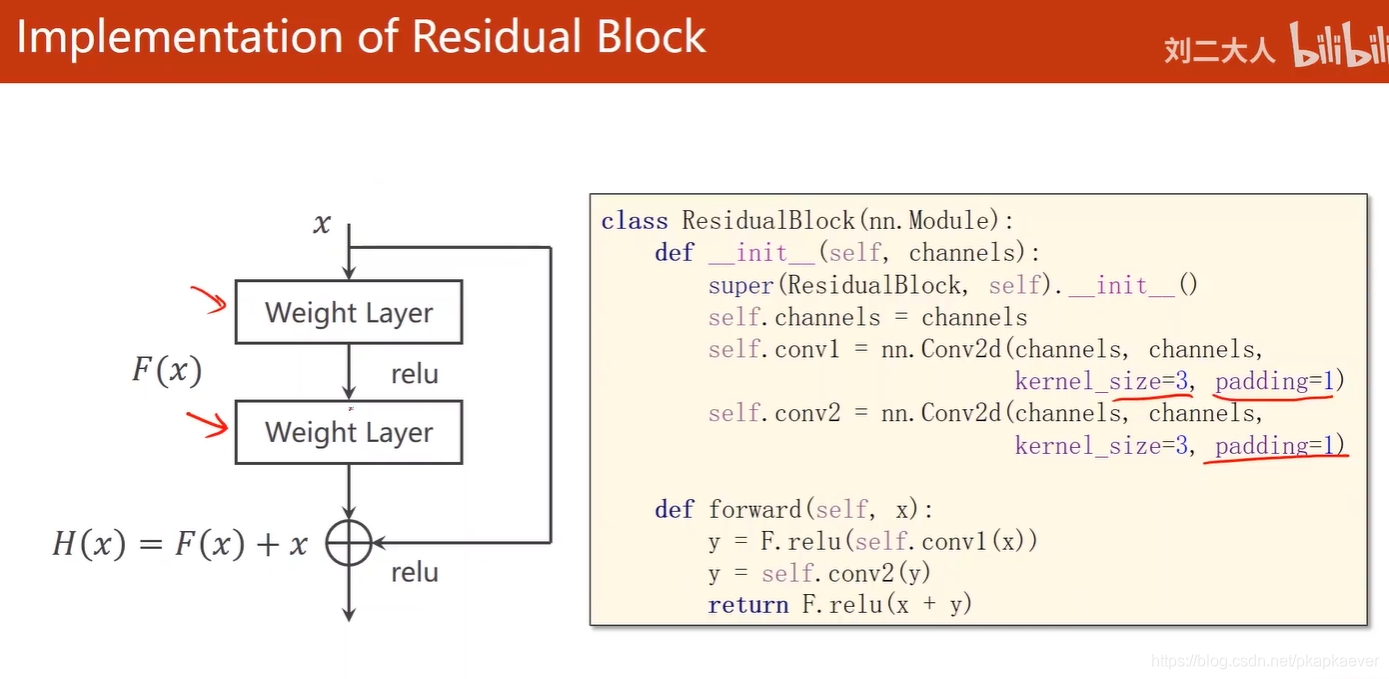
为了解决卷积层叠加太多导致梯度消失
Deep Residual Learning
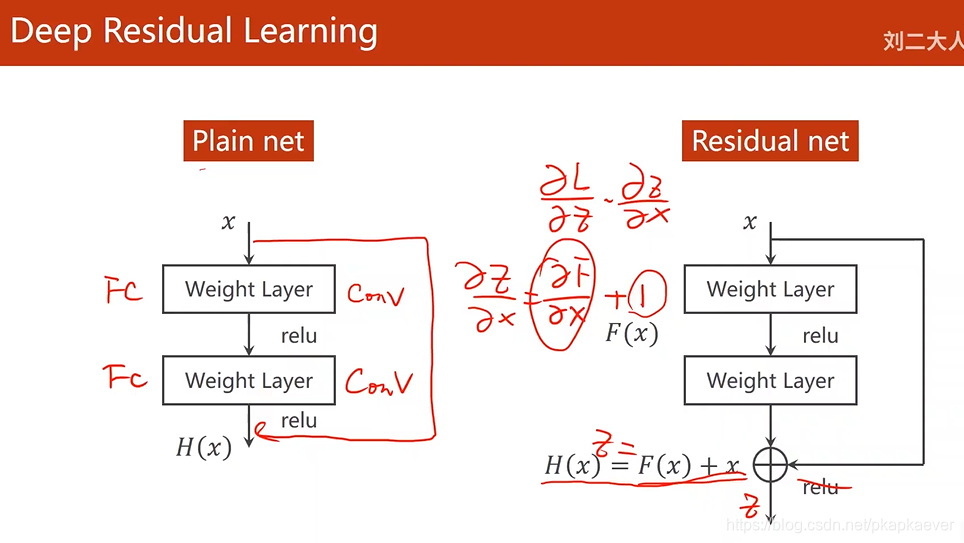
这样数据就会在1附近,多个相乘不会为0,由于要加上x,所以Weight层输出维度要与x张量维度相同。才能做此运算,这种块叫做Residual Block(残差块)
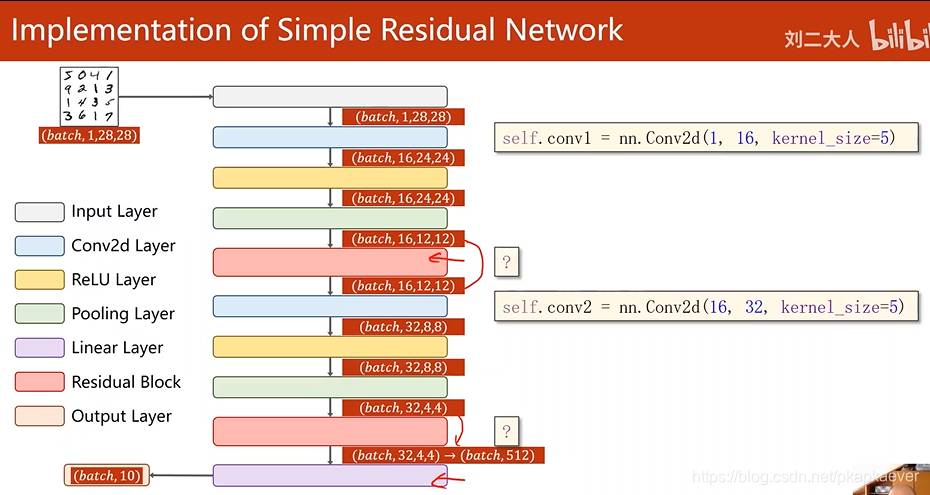
实现一个简单的Residual Network
import torch
from torch.utils.data import DataLoader
from torchvision import transforms
from torchvision import datasets
import torch.nn.functional as F
import matplotlib.pyplot as plt
import torch.nn as nn
import time
import datetime
batch_size =64
transform = transforms.Compose([transforms.ToTensor(), transforms.Normalize((0.1307, ), (0.3081, ))])
#将原始像素数据归一到(0,1)中 并基于均值0.1307和标准差0.3081来对数据进行标准化处理
train_dataset = datasets.MNIST(root='../dataset/mnist', train=True, download=False,transform=transform)
train_loader = DataLoader(train_dataset, shuffle=True,batch_size=batch_size)
#(下载)加载训练集,之后进行batch分组
test_dataset = datasets.MNIST(root='../dataset/mnist', train=False,download=False,transform=transform)
test_loader = DataLoader(test_dataset,shuffle=False ,batch_size=batch_size)
#测试集
class ResidualBlock(nn.Module):
def __init__(self,channels):
super(ResidualBlock,self).__init__()
self.channels = channels
##输出的通道数要和x的通道数(输入的通道数)相同
self.conv1 = nn.Conv2d(channels,channels,
kernel_size=3,
padding=1)
#为了保证输出图像大小不变,padding=1
self.conv2 = nn.Conv2d(channels, channels,
kernel_size=3,
padding=1)
def forward(self,x):
y = F.relu(self.conv1(x))
y = self.conv2(y)
return F.relu(x+y)
#先求和后激活
class Net(nn.Module):
def __init__(self):
super(Net,self).__init__()
self.conv1 = nn.Conv2d(1,16,kernel_size=5)
self.conv2 = nn.Conv2d(16,32,kernel_size=5)
self.mp = nn.MaxPool2d(2)
self.rblock1 = ResidualBlock(16)
self.rblock2 = ResidualBlock(32)
self.fc = nn.Linear(512,10)
def forward(self,x):
in_size = x.size(0)
x = self.mp(F.relu(self.conv1(x)))
x = self.rblock1(x)
x = self.mp(F.relu(self.conv2(x)))
x = self.rblock2(x)
x = x.view(in_size,-1)
x = self.fc(x)
return x
model= Net()
device = torch.device('cuda:0' if torch.cuda.is_available() else 'cpu')#设置GPU
model.to(device)#将数据加载到GPU
#---计算损失和更新
criterion = torch.nn.CrossEntropyLoss()#交叉熵size_average=False
optimizer = torch.optim.SGD(model.parameters(), lr = 0.01, momentum=0.5)#, momentum=0.5
#---计算损失和更新
def train(epoch):
running_loss = 0.0 #计算loss的累积
#num = []
#loss_list = []
for batch_idx, data in enumerate(train_loader, 0):
inputs, target = data
inputs, target = inputs.to(device), target.to(device)#将数据加载到GPU
optimizer.zero_grad()
#forward + backward + update
outputs = model(inputs)
loss = criterion(outputs, target)
loss.backward()
optimizer.step()
running_loss += loss.item()
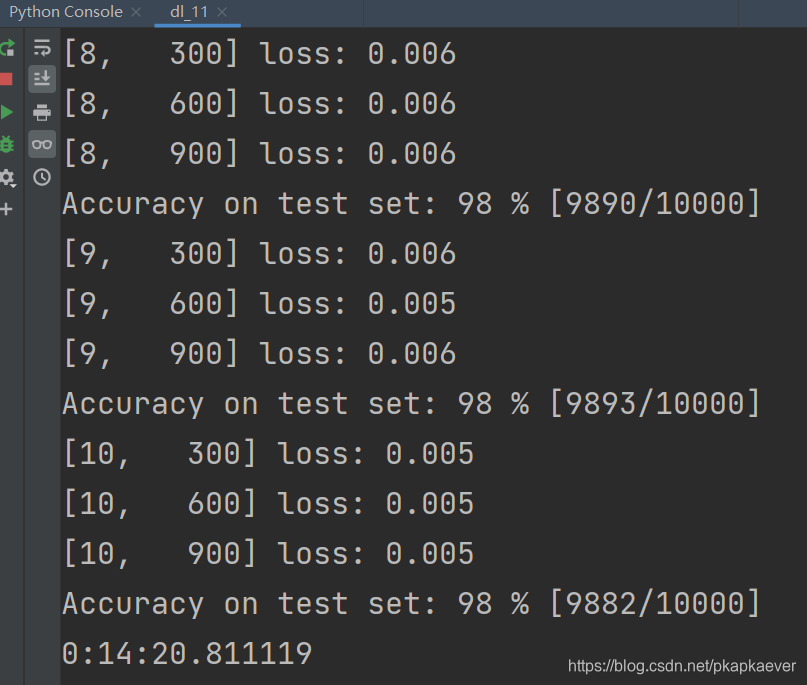
if batch_idx % 300 == 299:#每训练300个数据输出一次
print('[%d, %5d] loss: %.3f' % (epoch + 1, batch_idx + 1, running_loss / 2000))
running_loss = 0.0
'''num.append(batch_idx)
loss_list.append(loss.item())
plt.plot(num, loss_list)
plt.xlabel('num')
plt.ylabel('loss')
plt.show() # 绘图'''
def test():
correct = 0
total = 0
with torch.no_grad():#不计算梯度
for data in test_loader:
images, labels = data
images, labels = images.to(device), labels.to(device)#将数据加载到GPU
outputs = model(images)
_, predicted = torch.max(outputs.data, dim=1)
total += labels.size(0)
correct += (predicted == labels).sum().item()
print('Accuracy on test set: %d %% [%d/%d]' % (100 * correct / total, correct, total))
return correct / total
if __name__ == '__main__':
time_start = time.time() # 开始计时
Accurancy = []
epoch_list = []
for epoch in range(10):
train(epoch)
#test()
Accurancy.append(test())
epoch_list.append(epoch)
time_end = time.time() # 结束计时
print(datetime.timedelta(seconds= (time_end - time_start)))
plt.plot(epoch_list, Accurancy)
plt.xlabel('epoch')
plt.ylabel('Accurancy')
plt.show()#绘图
不同的设计
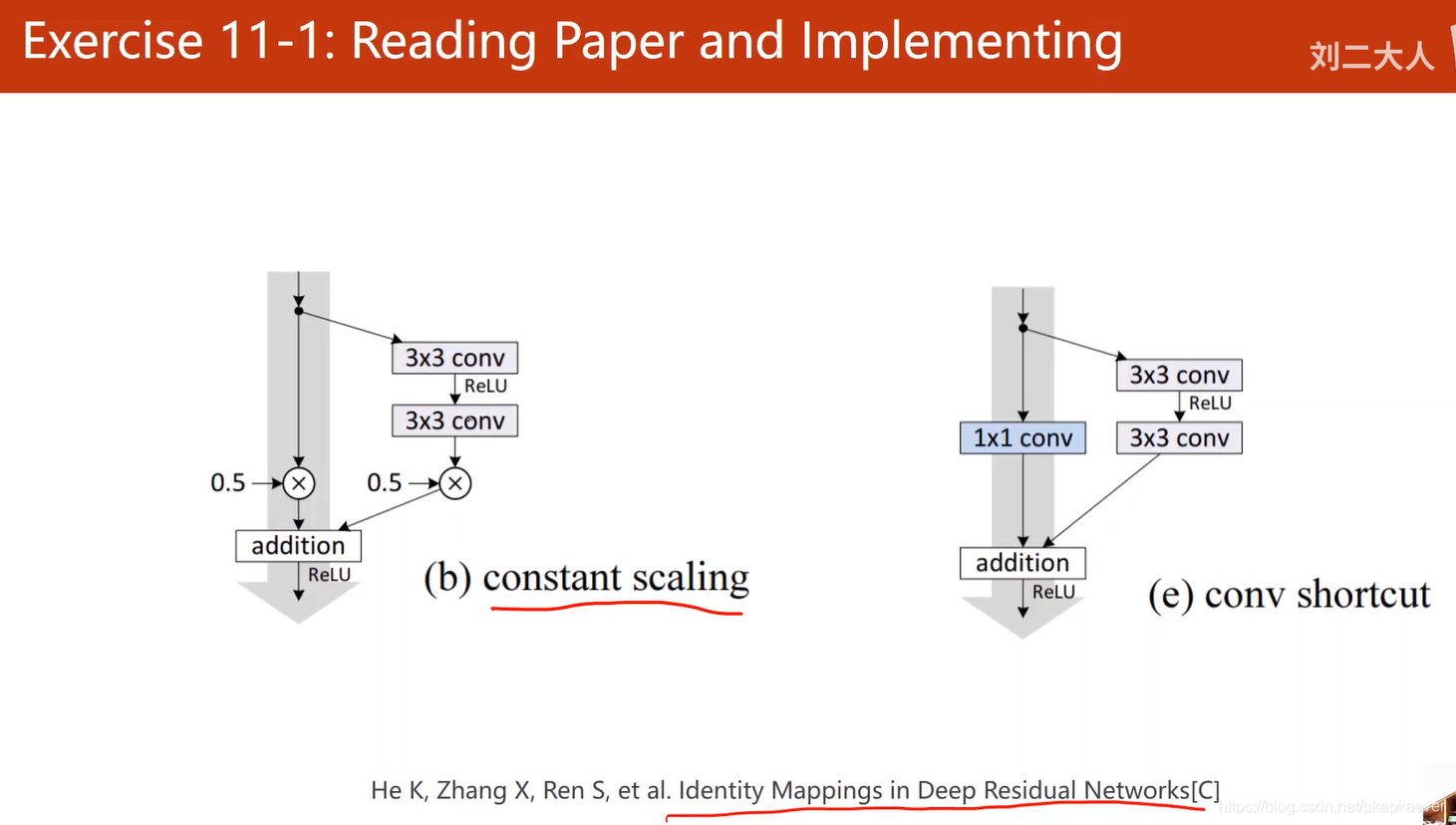
这篇论文给了很多关于 residual block的设计


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









