






串口通信UART
什么是串口
串口是一种在数据通讯中广泛使用的通讯接口,通常我们叫做UART (通用异步收发传输器Universal Asynchronous Receiver/Transmitter),其具有数据传输速度稳定、可靠性高、适用范围广等优点。在嵌入式系统中,串口常用于与外部设备进行通讯,如传感器、液晶显示屏、WiFi模块、蓝牙模块等。
串口通信中的 **TXD(Transmit Data)和 RXD(Receive Data)**是串口通信中的两个重要信号。
TXD是指串口发送端的数据信号。
RXD是指串口接收端的数据信号。
在串口通信中,发送端把要发送的数据发送到TXD引脚上,接收端则通过RXD引脚来接收这些数据。
TXD和RXD信号的实现方式取决于使用的芯片或模块。一般来说,它们都是通过芯片或模块的串口功能来实现的,这需要将相应的引脚连接到芯片或模块的串口引脚上。
在发送数据时,需要将要发送的数据通过串口的发送缓冲区发送到TXD引脚上,接收端通过RXD引脚接收这些数据并放入接收缓冲区中。在接收端收到完整的数据后,可以通过相应的处理进行数据的解析和处理。
需要注意的是,TXD和RXD的电平标准也需要一致,一般常见的有TTL电平和RS232电平,如果不一致则需要进行电平转换。同时,在编写程序时也需要注意串口波特率、数据位、停止位等参数的设置,以保证通信的稳定和可靠。
UART
通用异步收发传输器Universal Asynchronous Receiver/Transmitter
功能
- 发送数据
- 接收数据
引脚
TXD:发送的线(引脚)
RXD:接收的线(引脚)
发送数据
0x55 0b01010101
TXD高电平,对方认为是1 5V 8V 1.5V
TXD低电平,对方认为是0
电平标准
TTL: UART常用的是TTL电平标准
RS232:
RS485:
波特率
串口传输的速度,每秒钟发送的码元个数
波特率:每秒钟串口发送bit数,115200 1s可以发送115200bit 9600:1s发送9600bit
0x55: 8bit
发送和接收保持波特率一致
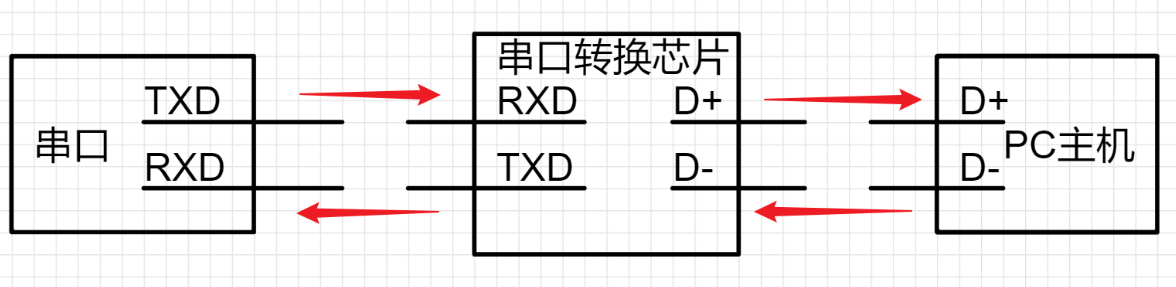
UART通信连接方式
TXD-RXD
RXD-TXD
UART引脚选择
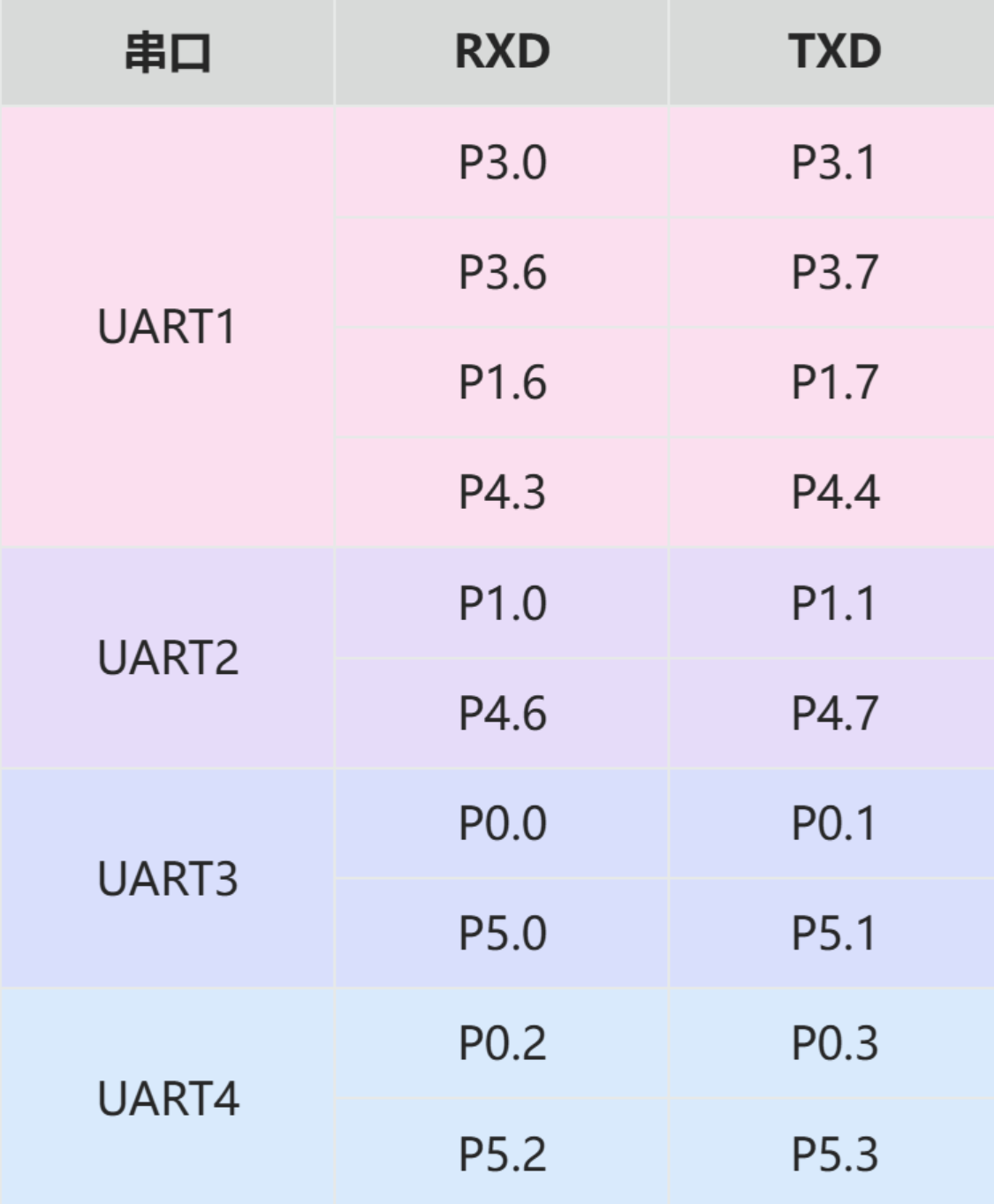
实现串口和电脑通信
- 电脑通过什么引脚和串口连接 P3.0和P3.1连接STC8 使用UART1
- 电脑支持USB信号,不能直接支持UART,需要CH340转换芯片
案例——两个STC8的通信
实现功能
通过电脑给A单片机发送数据,A单片机接收数据之后,把数据发送给B单片机,B单片机接收之后,发送给电脑
通过一个UART接收,通过另外一个UART发送
STC8H核心板串口调试
- 原理图
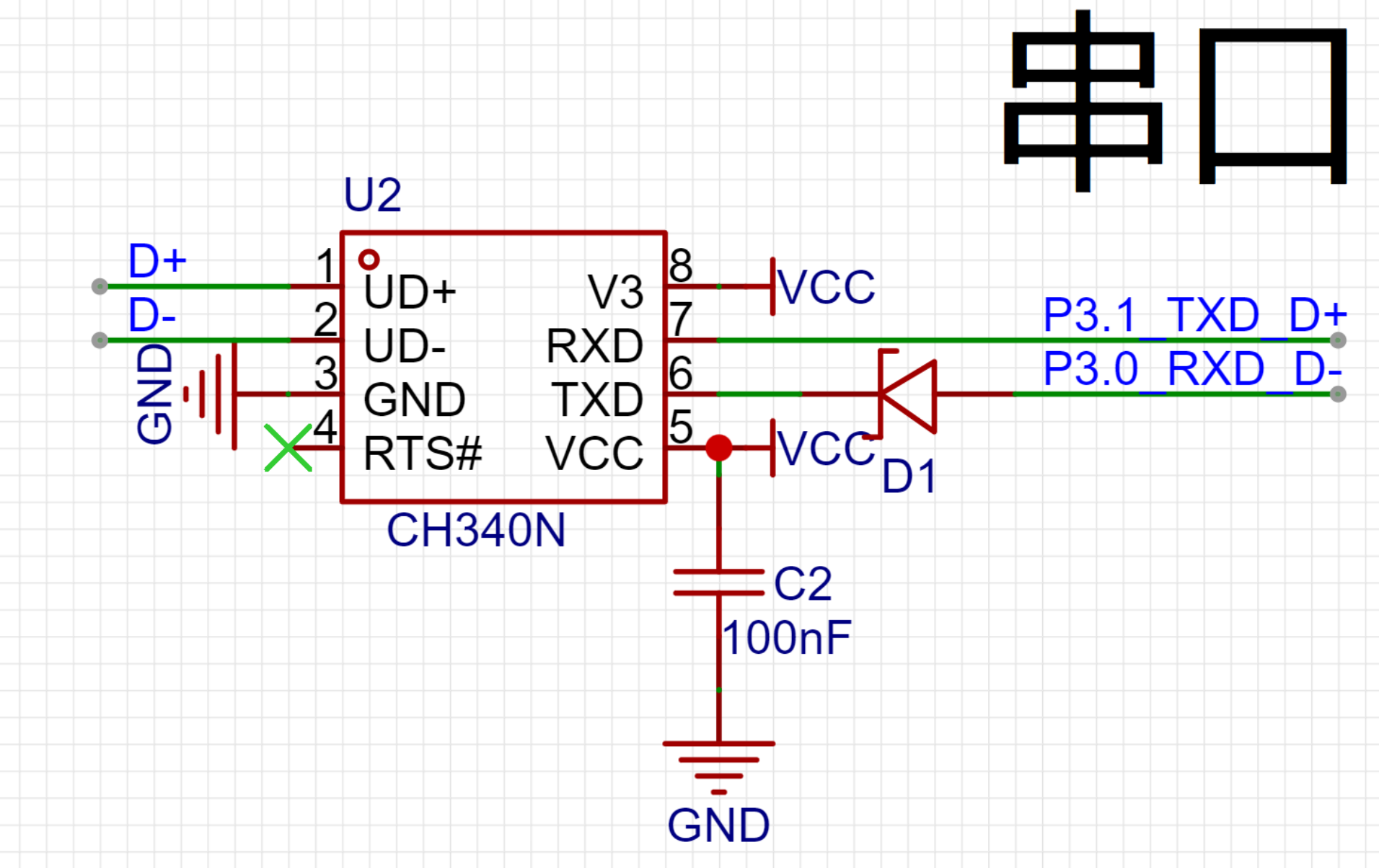
- `D+``D-`对应的usb口,和pc主机连接
- `P3.1``P3.0`对应的芯片
- 采用CH340将串口和USB之间进行转换
所以在PC机上的串口驱动,主要是用来解析CH340转换后的消息,这样PC机就能认识了
- 使用库函数编写串口通讯逻辑
需求:通过串口调试工具,发送消息给开发板,开发板原封不动的将消息传回。
开发步骤:
1. 新建项目
2. 导入库函数
3. 编写逻辑
串口调试实现
- 新建项目。新建
main.c文件 - 导入函数库。拷贝以下函数库文件到项目目录:
Config.hType_def.hGPIO.h``GPIO.cDelay.h``Delay.cUART.h``UART.c``UART_Isr.cNVIC.cNVIC.hSwitch.h
- 代码编写(发送)
#include "Config.h"
#include "GPIO.h"
#include "UART.h"
#include "Delay.h"
#include "NVIC.h"
#include "Switch.h"
/************* 功能说明 **************
双串口全双工中断方式收发通讯程序。
通过PC向MCU发送数据, MCU收到后通过串口把收到的数据原样返回, 默认波特率:115200,N,8,1.
通过开启 UART.h 头文件里面的 UART1~UART4 定义,启动不同通道的串口通信。
******************************************/
/******************* IO配置函数 *******************/
void GPIO_config(void)
{
GPIO_InitTypeDef GPIO_InitStructure; //结构定义
GPIO_InitStructure.Pin = GPIO_Pin_0 | GPIO_Pin_1; //指定要初始化的IO, GPIO_Pin_0 ~ GPIO_Pin_7
GPIO_InitStructure.Mode = GPIO_PullUp; //指定IO的输入或输出方式,GPIO_PullUp,GPIO_HighZ,GPIO_OUT_OD,GPIO_OUT_PP
GPIO_Inilize(GPIO_P3,&GPIO_InitStructure); //初始化
}
/*************** 串口初始化函数 *****************/
void UART_config(void)
{
COMx_InitDefine COMx_InitStructure; //结构定义
COMx_InitStructure.UART_Mode = UART_8bit_BRTx; //模式, UART_ShiftRight,UART_8bit_BRTx,UART_9bit,UART_9bit_BRTx
COMx_InitStructure.UART_BRT_Use = BRT_Timer1; //选择波特率发生器, BRT_Timer1, BRT_Timer2 (注意: 串口2固定使用BRT_Timer2)
COMx_InitStructure.UART_BaudRate = 115200ul; //波特率, 一般 110 ~ 115200
COMx_InitStructure.UART_RxEnable = ENABLE; //接收允许, ENABLE或DISABLE
COMx_InitStructure.BaudRateDouble = DISABLE; //波特率加倍, ENABLE或DISABLE
UART_Configuration(UART1, &COMx_InitStructure); //初始化串口1 UART1,UART2,UART3,UART4
NVIC_UART1_Init(ENABLE,Priority_1); //中断使能, ENABLE/DISABLE; 优先级(低到高) Priority_0,Priority_1,Priority_2,Priority_3
UART1_SW(UART1_SW_P30_P31); //UART1_SW_P30_P31,UART1_SW_P36_P37,UART1_SW_P16_P17,UART1_SW_P43_P44
}
/**********************************************/
void main(void)
{
// EAXSFR(); /* 扩展寄存器访问使能 */
GPIO_config();
UART_config();
EA = 1;
TX1_write2buff(0x23); // #
printf("STC8H8K64U UART1 Test Programme!\r\n"); //UART1发送一个字符串
PrintString1("STC8H8K64U UART1 Test Programme!\r\n"); //UART1发送一个字符串
while (1)
{
TX1_write2buff(0x2F); // /
delay_ms(250);
delay_ms(250);
delay_ms(250);
delay_ms(250);
}
}
- 代码编写(接收并回写)
#include "Config.h"
#include "GPIO.h"
#include "UART.h"
#include "Delay.h"
#include "NVIC.h"
#include "Switch.h"
void GPIO_config(void) {
GPIO_InitTypeDef GPIO_InitStructure; //结构定义
GPIO_InitStructure.Pin = GPIO_Pin_0 | GPIO_Pin_1; //指定要初始化的IO, P30, P31
GPIO_InitStructure.Mode = GPIO_PullUp; //指定IO的输入或输出方式,GPIO_PullUp,GPIO_HighZ,GPIO_OUT_OD,GPIO_OUT_PP
GPIO_Inilize(GPIO_P3, &GPIO_InitStructure);//初始化
}
void UART_config(void) {
COMx_InitDefine COMx_InitStructure; //结构定义
COMx_InitStructure.UART_Mode = UART_8bit_BRTx; //模式, UART_ShiftRight,UART_8bit_BRTx,UART_9bit,UART_9bit_BRTx
COMx_InitStructure.UART_BRT_Use = BRT_Timer1; //选择波特率发生器, BRT_Timer1, BRT_Timer2 (注意: 串口2固定使用BRT_Timer2)
COMx_InitStructure.UART_BaudRate = 115200ul; //波特率, 一般 110 ~ 115200
COMx_InitStructure.UART_RxEnable = ENABLE; //接收允许, ENABLE或DISABLE
COMx_InitStructure.BaudRateDouble = DISABLE; //波特率加倍, ENABLE或DISABLE
UART_Configuration(UART1, &COMx_InitStructure); //初始化串口1 UART1,UART2,UART3,UART4
NVIC_UART1_Init(ENABLE,Priority_1); //中断使能, ENABLE/DISABLE; 优先级(低到高) Priority_0,Priority_1,Priority_2,Priority_3
UART1_SW(UART1_SW_P30_P31); //UART1_SW_P30_P31,UART1_SW_P36_P37,UART1_SW_P16_P17,UART1_SW_P43_P44
}
void on_uart1_recv() {
u8 i;
// RX_Cnt收到的数据个数(字节u8 - unsigned char)
// 将收到的数据, 按字节逐个循环
for(i=0; i<COM1.RX_Cnt; i++) {
u8 dat = RX1_Buffer[i]; // 1 1 1 1 0 0 0 0 -> 0xF0
TX1_write2buff(dat); //收到的数据原样返回
}
}
/**
开启串口调试,接收数据,把收到的数据原样返回
**/
void main() {
// 初始化IO
GPIO_config();
// 初始化UART
UART_config();
// 开启中断(全局)必须要写!
EA = 1;
// 写一个字节
TX1_write2buff(0x23);
// 通过PrintString1输出字符串
PrintString1("STC8H8K64U UART1 Test Programme!\r\n"); //UART1发送一个字符串
// 通过printf输出字符串
printf("STC8H8K64U UART1 Test Programme!\r\n"); //UART1发送一个字符串
while(1) {
// 超时计数
// 一旦收到了一个字节数据,RX_TimeOut会初始化一个值(例如:5)
if((COM1.RX_TimeOut > 0) && (--COM1.RX_TimeOut == 0))
{
if(COM1.RX_Cnt > 0)
{
// 收到数据了,on_uart1_recv();
on_uart1_recv();
}
// 处理完数据,将数据个数清零
COM1.RX_Cnt = 0;
}
// 注意这里delay代码的位置,属于while
delay_ms(10);
}
}
- 调试
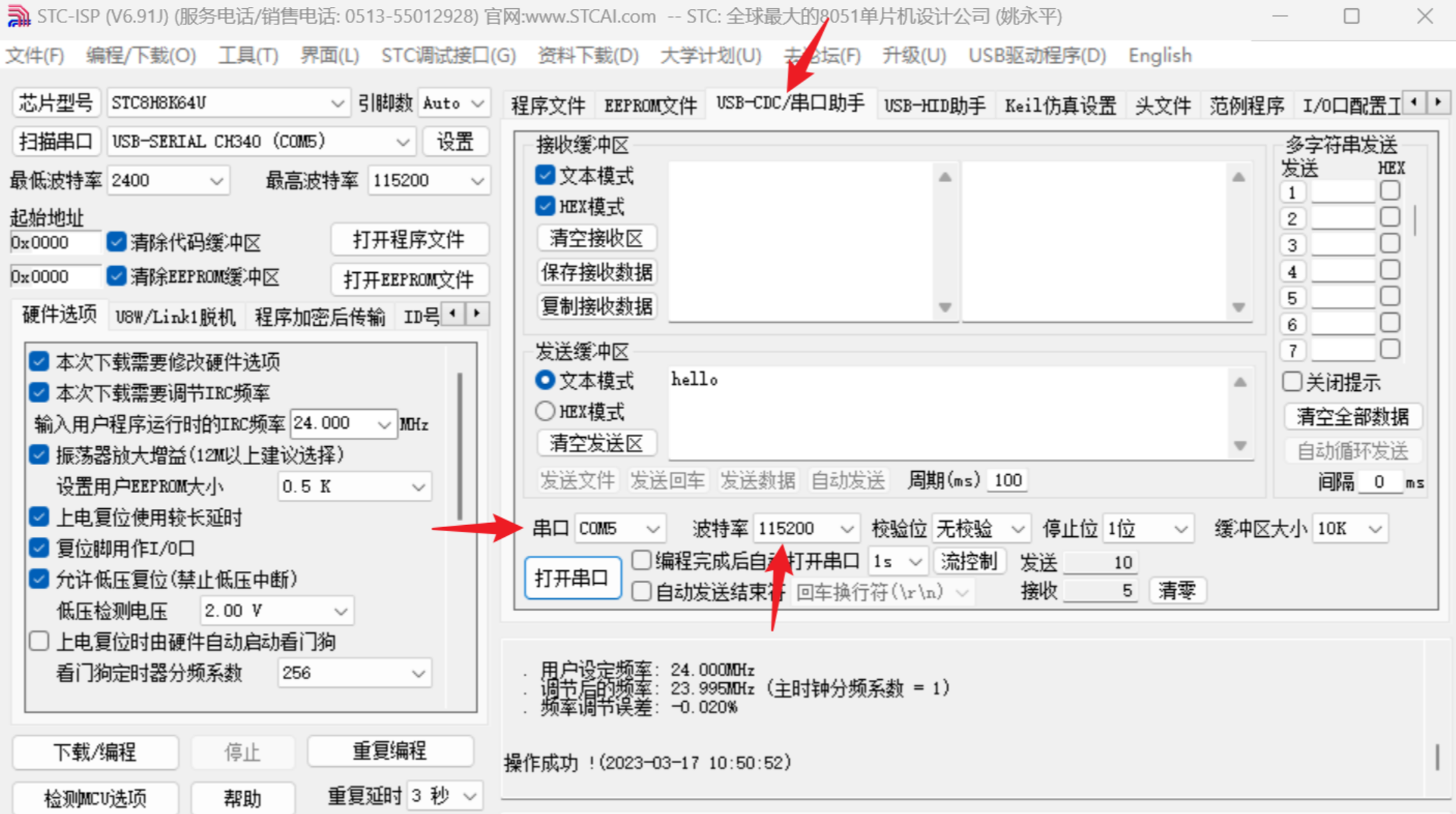
使用STC-ISP调试工具进行调试。切换好串口助手,选择正确的串口,设置和代码中相同的波特率。
通过发送区进行数据发送,通过接收区观察接收内容。
串口调试重难点
功能配置
- 配置IO的工作模式:如果不配置工作模式,会导致串口不工作。(UART1的当前代码中的引脚
P3.0和P3.1默认是准双向口,可以不配置,但是不要存在侥幸心理,导致其他的串口使用中没有配置准双向口) - 配置UART的串口工作模式
**UART_Mode**:UART_ShiftRight同步移位输出:按位传输,效率低,通常不用。**UART_8bit_BRTx**** 8位数据,可变波特率**:常用。发送和接收的数据为8位。UART_9bit9位数据,固定波特率,即无法在运行时动态更改波特率。UART_9bit_BRTx9位数据,可变波特率:发送和接收的数据为9位。最后一位为奇偶校验位。
- 配置UART的波特率
**RaudRate**:根据实际情况来定,波特率越高,传输越快,但是出现丢帧的概率越高。通常115200就够用。单位是bit/s - 配置UART的波特率发生器
BRT_Use:系统提供了4个发生器,通常一一对应。BRT_Timer1BRT_Timer2BRT_Timer3BRT_Timer4
- 配置UART是否接收
RxEnable:可以获取RXD接收的数据。 - 配置UART波特率加倍
BaudRateDouble:默认不加倍,配置加倍会导致波特率是设定的双倍,过高会导致丢帧。 - 配置UART中断
Interrupt和优先级Priority:UART的数据收发是通过中断实现的,如果不配置,则无法对外发送数据,TXD和RXD不工作。 - 配置UART的端口
P_SW:串口通道可以通过几组引脚来实现,但是需要指明是哪一组。
UART的接收与发送
- 关于接收
接收是通过接收缓冲区进行接收。
在死循环中,间隔一定时间到缓冲区中去取数据,有数据,说明就是接收了
- 关于发送
发送是通过发送缓冲区进行发送。
发送提供了单个字节发送的API: TX1_write2buff(byte)
发送提供了字符串发送的API: PrintString1(str)
配置printf
修改了UART.h的printf输出串口配置为UART1,才能通过printf打印日志
打开UART.h头文件,保留用到的UART宏
#define UART1 1 //使用哪些串口就开对应的定义,不用的串口可屏蔽掉定义,节省资源
//#define UART2 2
//#define UART3 3
//#define UART4 4
指定printf函数使用UART1串口
#define PRINTF_SELECT UART1 //选择 printf 函数所使用的串口,参数 UART1~UART4
注意:
如果串口窗口出现**乱码**内容,通常原因有两个:
- 烧录时,选择的IRC频率不是
24.000 MHz - 连接串口时,选择的波特率和代码中的不一致,通常为
115200
:::color4
重要的事情说三遍:
使用UART一定要记得打开中断总开关!!!EA = 1;
使用UART一定要记得打开中断总开关!!!EA = 1;
使用UART一定要记得打开中断总开关!!!EA = 1;
:::


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









