







 本文详细介绍了如何根据硬件配置MT9V024传感器,包括设备ID确定、16/8位数据读写、工作模式选择(同步/顺序主模式)、初始化步骤(寄存器设置)以及消隐控制。特别关注了寄存器操作和不同工作模式对帧周期的影响。
本文详细介绍了如何根据硬件配置MT9V024传感器,包括设备ID确定、16/8位数据读写、工作模式选择(同步/顺序主模式)、初始化步骤(寄存器设置)以及消隐控制。特别关注了寄存器操作和不同工作模式对帧周期的影响。
参照<MT9V024-D.PDF>手册。
1、确定Device的ID
通过SERIAL BUS DESCRIPTION部分得知,器件有4个可能的ID(0x90, 0x98,0xB0 and 0xB8),由芯片管脚S_CTRL_ADR0、S_CTRL_ADR1上的电平决定:
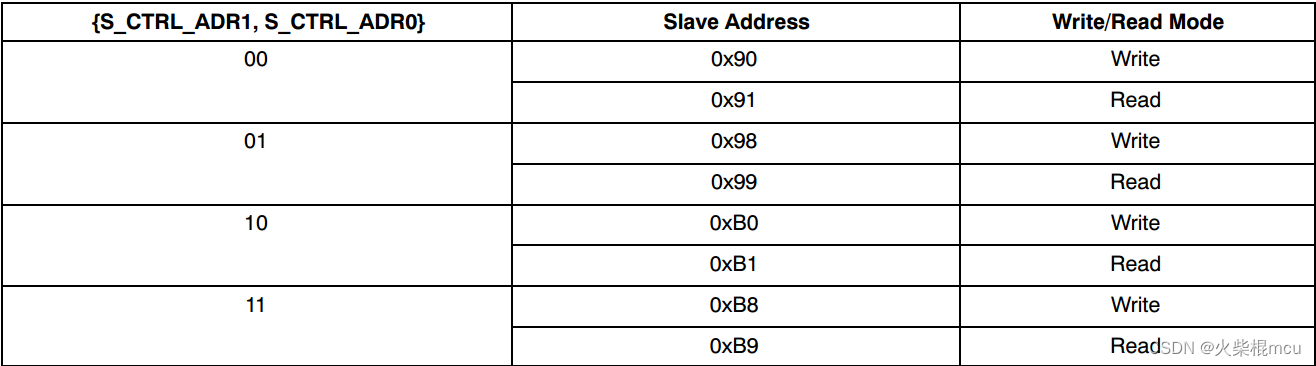
我的硬件电路上S_CTRL_ADR0和S_CTRL_ADR1管脚接的GND,所以器件的地址为0x90/0x91。
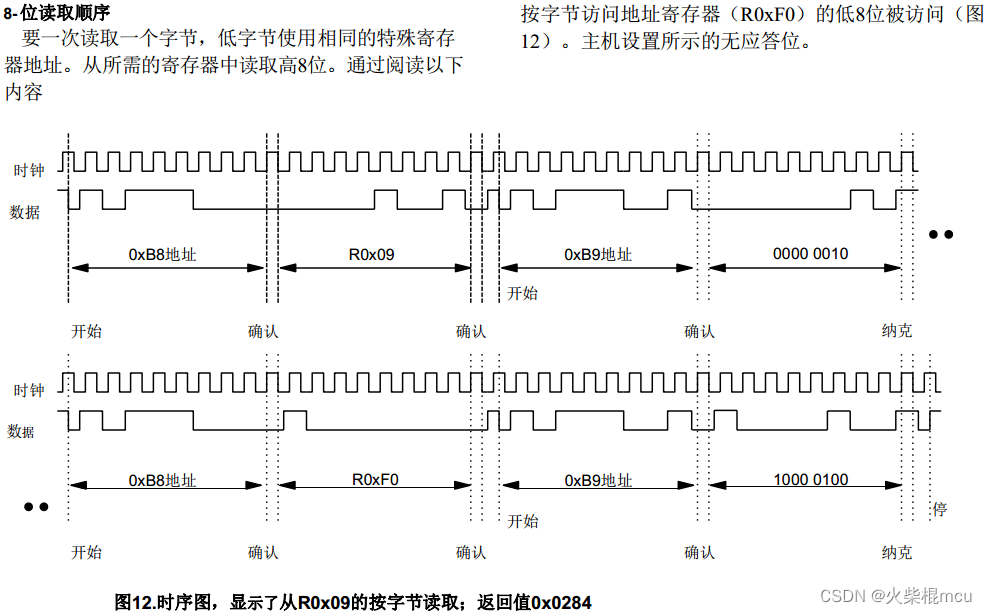
2、读写寄存器
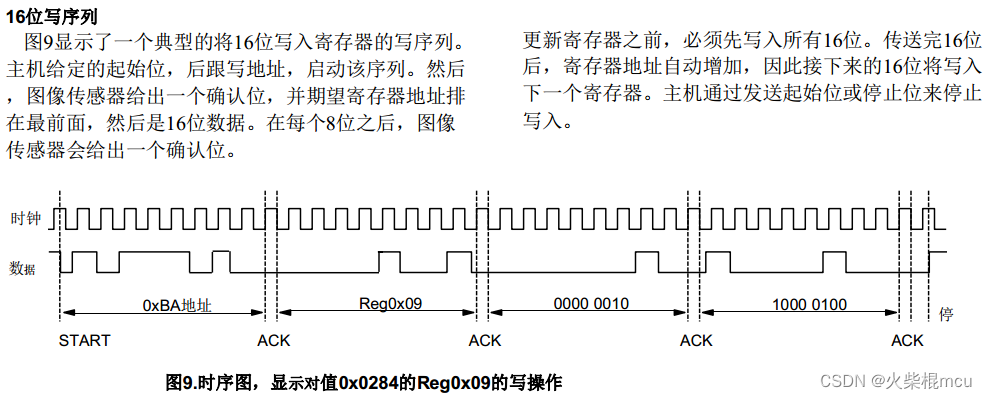
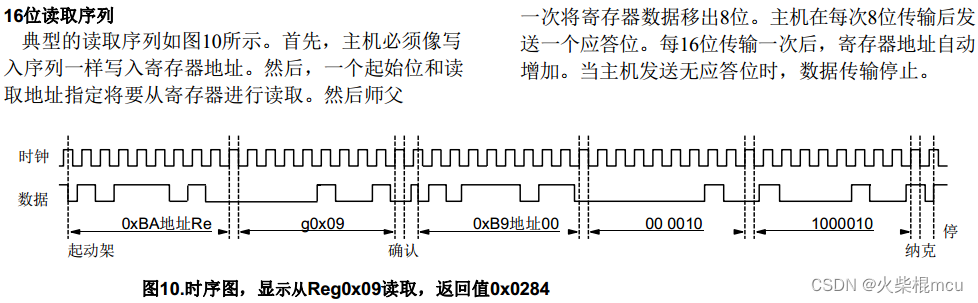
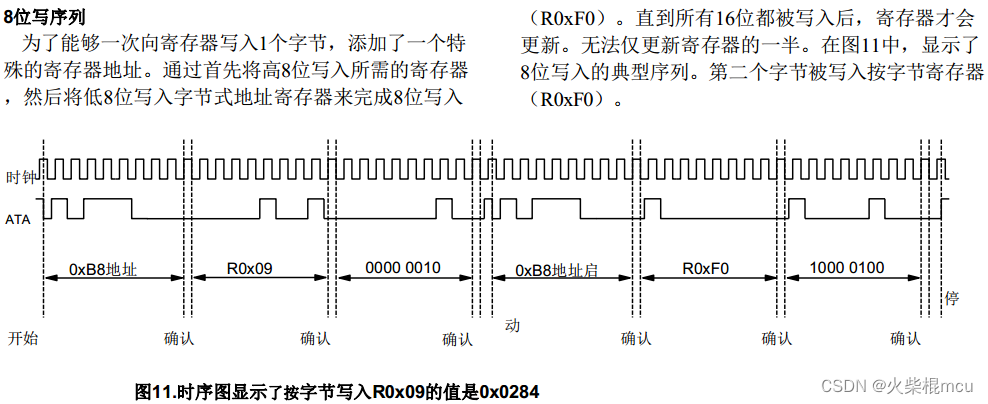
MT9V024的寄存器宽度为16位,可以一次读写8位或16位数据。如果是按16进行写操作,那么写入寄存器地址之后,连续写两个字节的数据即可,高字节在前,低字节在后。如果是按8位进行写操作,那么先将数据的高字节写入寄存器,接着将数据的低字节写入0xF0寄存器(特殊寄存器),实际上也是向寄存器写入16位数据。
 3、Sensor工作模式
3、Sensor工作模式
正常使用应配置MT9V024工作于主模式,FRAME_VALID、LINE_VALID由Sensor产生。
主模式还分为同步主模式和顺序主模式两种,同步主模式是曝光发生在数据传输期间,顺序主模式是曝光之后才进行数据传输。
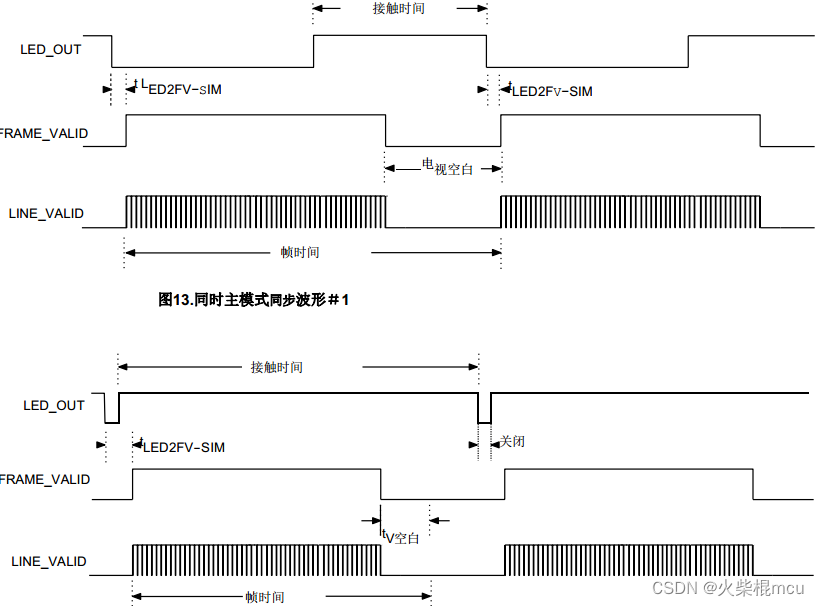
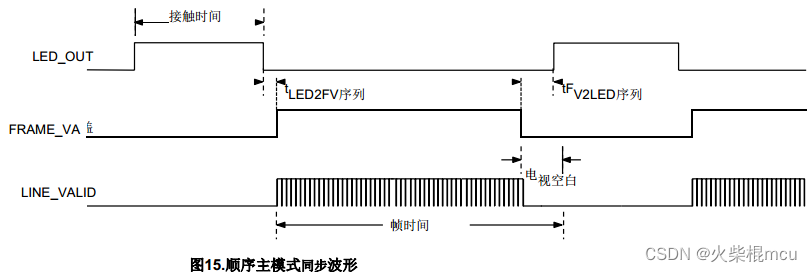 由于顺序主模式曝光在数据传输之前,所以在其它配置相同的情况下,顺序主模式比同步主模式的帧周期更长,顺序主模式的帧周期是同步主模式的帧周期两倍少一点。
由于顺序主模式曝光在数据传输之前,所以在其它配置相同的情况下,顺序主模式比同步主模式的帧周期更长,顺序主模式的帧周期是同步主模式的帧周期两倍少一点。
4、Sensor初始化
{0xFE,0xBEEF}, //unlock reg.
{0x07,0x0388}, //bit15=0选用上下文A,bit9=1使能像素校正,bit8=1同步主模式,bit7=1打开并行输出模式,bit[4:3]主模式.
{0x03,0x01e0}, //Height:480.
{0x04,0x0280}, //Width:640.
{0xFE,0xDEAD}, //lock reg.5、消隐控制
水平消隐寄存器0x05的默认值为0x5e,垂直消隐寄存器0x06的默认值为0x2d。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











