






stm32写字机器人资料
主控stm32f103c8t6
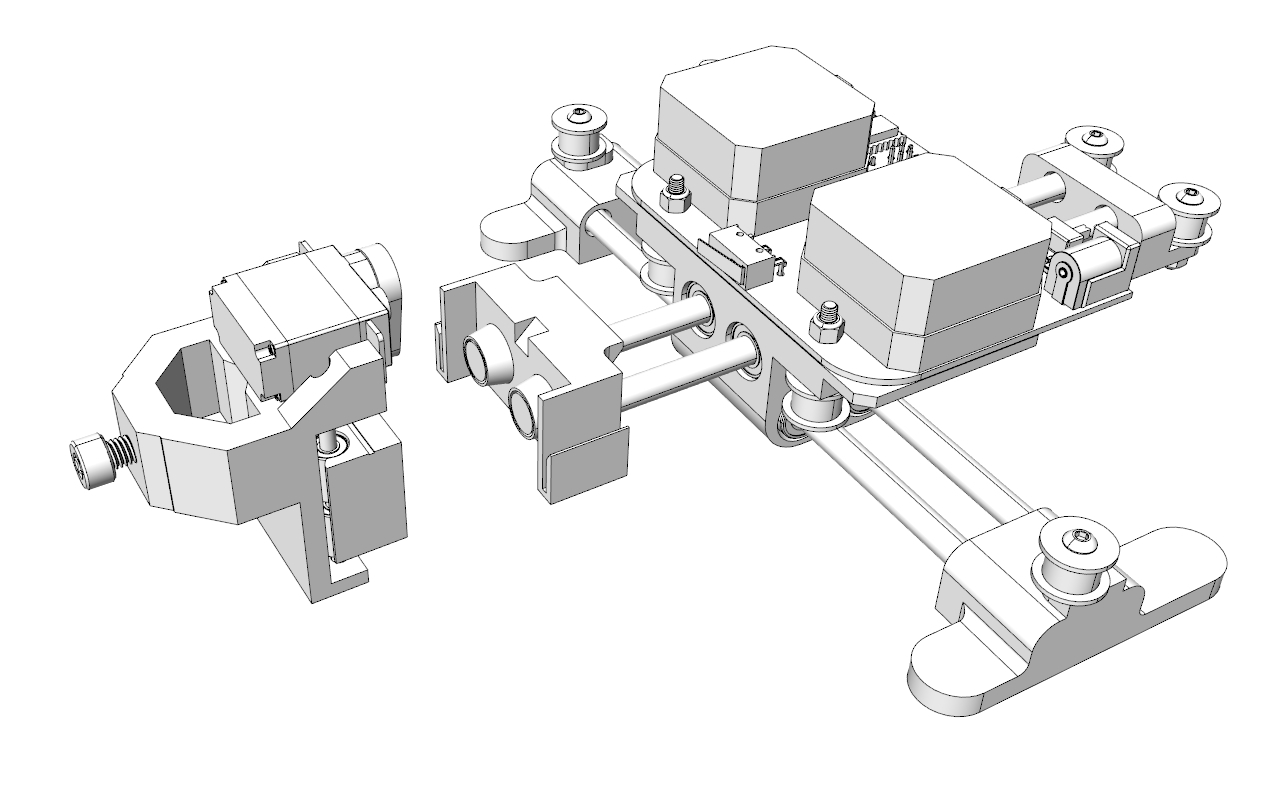
包含程序,原理图,pcb,机械结构
YID:995657049228605
lin昵称好难设置
最近,越来越多的人对于写字机器人的技术和应用产生了浓厚的兴趣。随着科技的不断进步和人们对个性化定制的追求,写字机器人逐渐成为一个备受关注的技术领域。本文将围绕着主控芯片STM32F103C8T6展开,详细介绍写字机器人的各个方面,包括程序、原理图、PCB和机械结构。
- 主控芯片STM32F103C8T6的选择
主控芯片是写字机器人的核心部件之一,它承担着控制机器人运动和书写的重要任务。在众多可选的主控芯片中,STM32F103C8T6凭借其先进的性能和丰富的外设功能,成为了写字机器人开发者的首选。本节将介绍STM32F103C8T6的主要特点和优势。
首先,STM32F103C8T6采用了基于ARM Cortex-M3内核的32位微控制器。它具备高性能和低功耗的特点,适合于要求高速运算和低功耗的应用场景。此外,该芯片内置了丰富的外设接口,包括通用输入输出口、定时器、串口通信口等,为写字机器人的功能拓展提供了广泛的可能性。
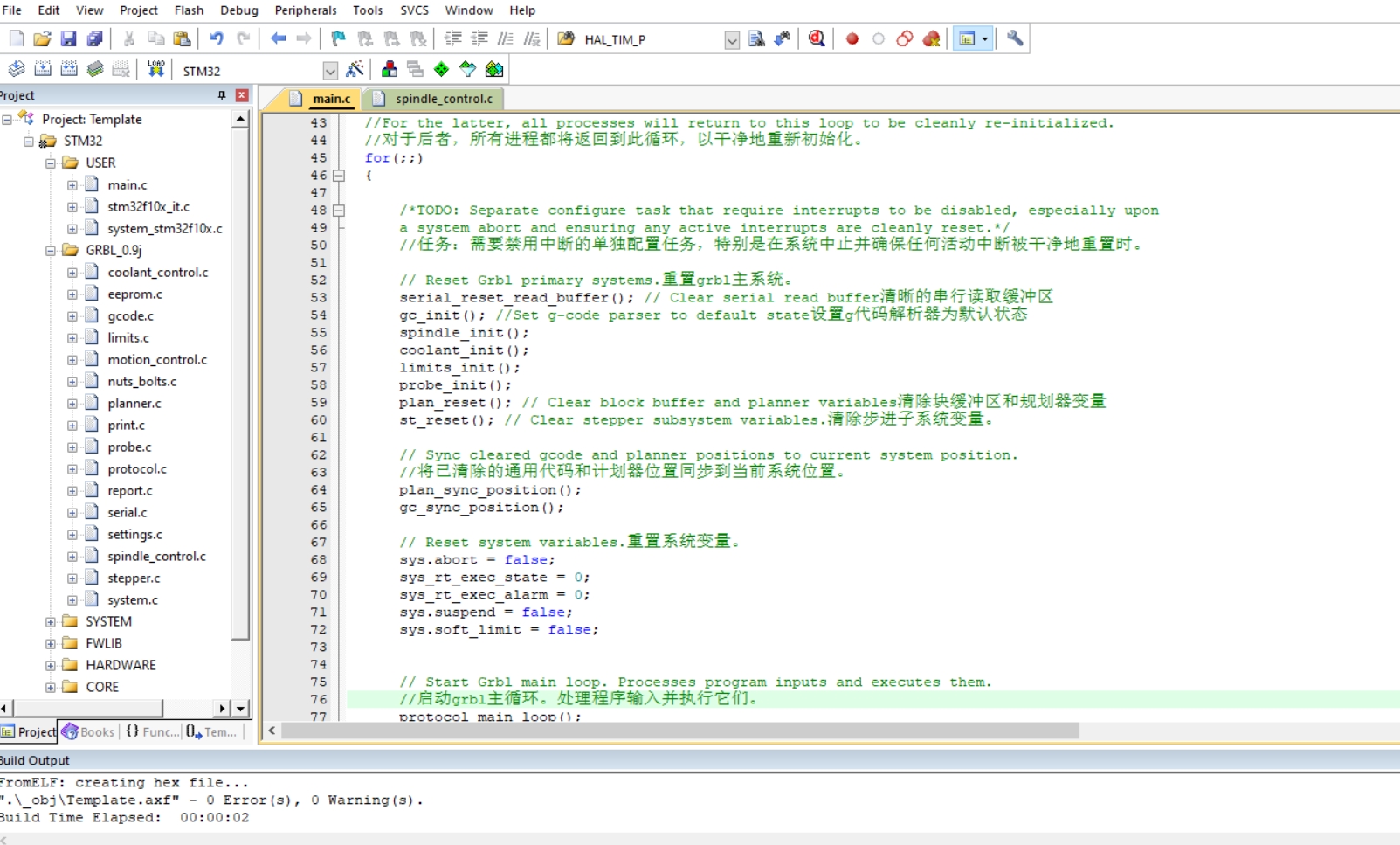
- 程序设计
在写字机器人的开发过程中,程序设计是至关重要的一环。本节将针对STM32F103C8T6的特点,介绍写字机器人的程序设计方法和实践经验。
首先,我们可以利用STM32的开发环境,如Keil或者IAR Embedded Workbench,进行程序的开发和调试。通过这些工具,开发者可以方便地编写C语言代码,并通过仿真和调试功能进行程序的测试和优化。
其次,需要针对写字机器人的特定需求,设计合适的算法和控制逻辑。例如,可以采用逆运动学算法来实现机械臂的精确控制,从而实现书写的准确性和流畅性。此外,在程序设计过程中还需要考虑到运动规划、路径规划等问题,以确保机器人能够按照期望的轨迹进行书写。
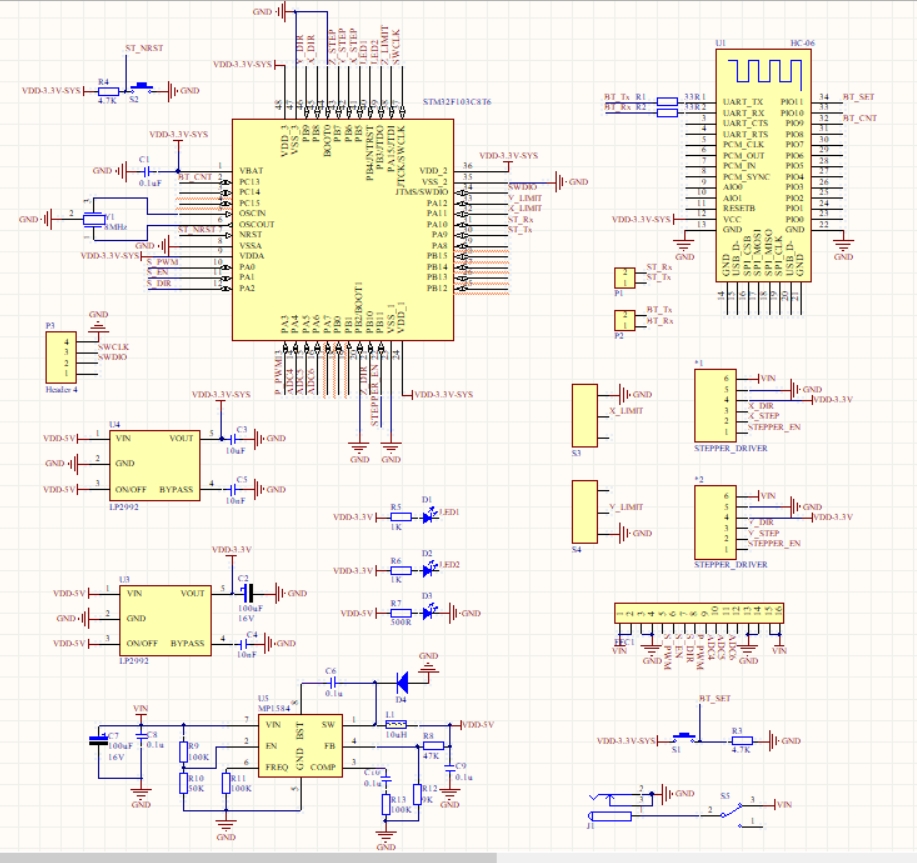
- 原理图设计
原理图是写字机器人电路设计的重要组成部分。通过绘制清晰的原理图,可以帮助开发者理清各个电路模块之间的连接关系,从而更好地进行电路设计和优化。本节将介绍写字机器人原理图设计的一般方法和注意事项。
在进行原理图设计前,需要对写字机器人的各个功能模块进行合理的划分和组织。例如,可以将电源模块、主控模块、驱动模块等进行分类,并分别进行原理图设计。在设计过程中,需要注意各个模块之间的连接方式和信号传输的可靠性。
此外,为了提高电路的稳定性和可靠性,可以采用一些常见的电路保护措施,如过压保护、过流保护等。同时,还需注意地线和电源线的布局和分离,以降低干扰和噪声对电路的影响。
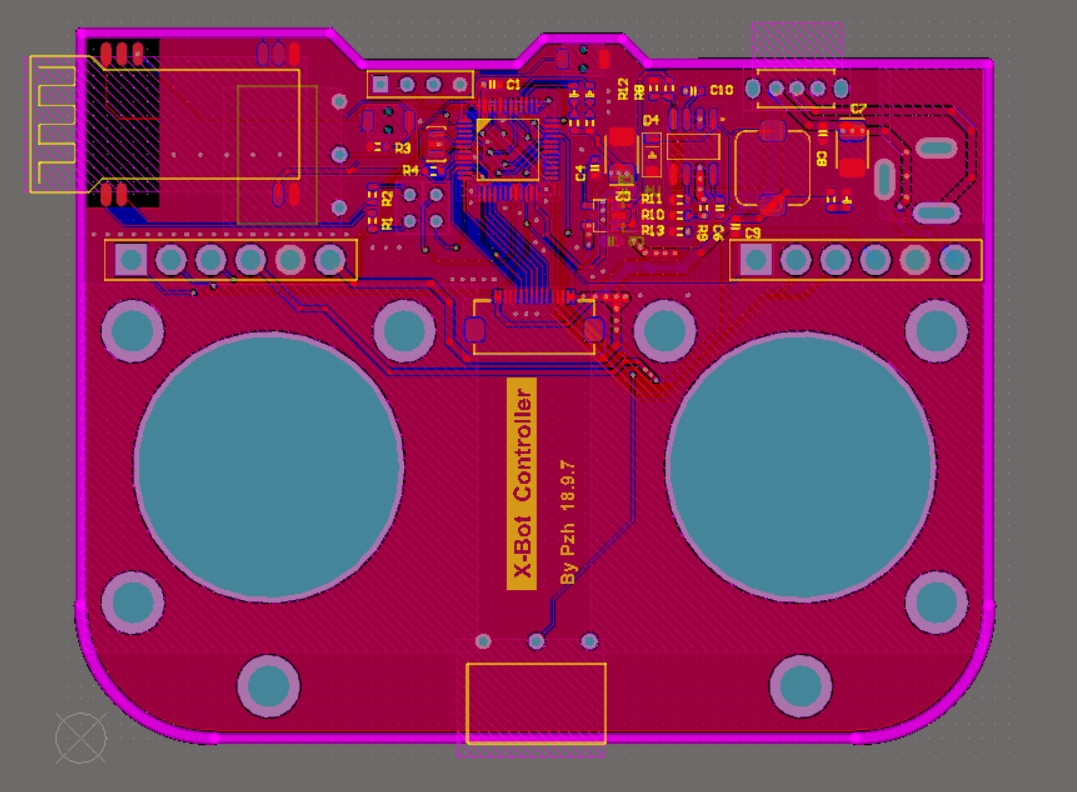
- PCB设计
PCB设计是将原理图转化为实际电路板的过程,它直接影响着写字机器人的性能和可靠性。本节将介绍写字机器人PCB设计的一般步骤和技巧。
首先,在进行PCB设计前,需要对原理图进行细致的审查,并根据电路板的尺寸和布局要求进行合理的调整。在布局过程中,需要注意各个功能模块的位置布置和信号线的走向,以最大限度地减少信号干扰和噪声。
其次,在进行布线时,需要根据信号传输的特点和频率要求,合理选择信号线的宽度和间距,并采取适当的屏蔽措施,以提高信号的传输质量。同时,还需要注意电源线和地线的布局和走线方式,以确保电路的稳定供电和低噪声。
总结:
本文围绕着主控芯片STM32F103C8T6,详细介绍了写
相关的代码,程序地址如下:http://coupd.cn/657049228605.html
















 364
364











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









