






名词注释
<link> <!-- 机器人身体部分 -->
<visual> <!-- 部件外观描述 -->
<origin> <!-- 沿自己几何中心的偏移与旋转量 -->
<geometry> <!-- 几何形状 -->
<material> <!-- 材质子标签 -->
<collision> <!-- 碰撞属性 -->
<inertial> <!-- 质量/惯性属性 -->
</plugin> <!-- 插件 -->
URDF
URDF使用XML(Extensible Markup Language,可扩展标记语言)来描述机器人的几何结构、传感器和执行器等信息。
<?xml version="1.0"?>
<robot name="first robot">
<!-- XML 注释 -->
<link name="base link"></link>
</robot>一个UFDF的例子:first_robot.urdf
<?xml version="1.0"?>
<robot name="first_robot">
<!-- 机器人身体部分 -->
<link name="base_link">
<!-- 部件外观描述 -->
<visual>
<!-- 沿自己几何中心的偏移与旋转量 -->
<origin xyz="0 0 0" rpy="0 0 0" />
<!-- 几何形状 -->
<geometry>
<!-- 圆柱体,半径0.1m,高度 0.12m -->
<cylinder length="0.12" radius="0.10" />
</geometry>
<!-- 材质子标签-蓝色 -->
<material name="blue">
<color rgba="0.1 0.1 1.0 0.5" />
</material>
</visual>
</link>
<!-- 机器人IMU部件 -->
<link name="imu_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry>
<box size="0.02 0.02 0.02" />
</geometry>
</visual>
<material name="black">
<color rgba="0 0 0 0.5" />
</material>
</link>
<!-- 机器人关节 -->
<joint name="imu_joint" type="fixed">
<!-- 父部件 -->
<parent link="base_link" />
<!-- 子部件 -->
<child link="imu_link" />
<!-- 子部件相对父部件的平移和旋转 -->
<origin xyz="0 0 0.03" rpy="0 0 0" />
</joint>
</robot>
使用Xacro简化URDF文件
Xacro(XML Macro)是基于XML的宏语言,用于简化URDF文件的创建和维护。使用它可以将部件等定义为宏,在需要使用的时候进行调用即可。
<robot lxmlns:xacro="http://www.ros.org/wiki/xacro"name="first robot">
<!-- 声明 base 模块 -->
<xacro:macro name="base link"params="length radius">
<link name="base link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry>
<cylinder length="${length}" radius="${length}" />
</geometry>
<material name="white">
<color rgba="1.0 1.0 1.0 0.5" />
</material>
</visual>
</link>
</xacro:macro>
<!--传递参数调用 base link 模块 -->
<xacro:base link length="0.12" radius="0.1" />仿真软件Gazebo
Gazebo使用的是sdf格式,而我们的机器人建模使用的是URDF,所以要想在Gazebo中显示机器人模型,就需要将URDF转换成sdf。不用操心如何转换,因为ROS2提供了一些功能包,可以帮助我们直接实现这一转换。
ros2将URDF模型转换为sdf文件
sudo apt install ros-$ROS_DISTRO-gazebo-ros-pkgs在gazebo中显示机器人模型的launch文件
#在gazebo中显示机器人模型的launch文件
import launch
import launch_ros
from ament_index_python.packages import get_package_share_directory
from launch.launch_description_sources import PythonLaunchDescriptionSource
def generate_launch_description():
# 获取功能包的默认路径
robot_name_in_model = "fishbot"
urdf_tutorial_path = get_package_share_directory('fishbot_description')
default_model_path = urdf_tutorial_path + '/urdf/fishbot/fishbot.urdf.xacro'
default_world_path = urdf_tutorial_path + '/world/custom_room.world'
# 为 Launch 声明参数
action_declare_arg_mode_path = launch.actions.DeclareLaunchArgument(
name='model', default_value=str(default_model_path),description='URDF 的绝对路径')
# 获取文件内容生成新的参数
robot_description = launch_ros.parameter_descriptions.ParameterValue(
launch.substitutions.Command(
['xacro ', launch.substitutions.LaunchConfiguration('model')]),
value_type=str)
robot_state_publisher_node = launch_ros.actions.Node(
package='robot_state_publisher',
executable='robot_state_publisher',
parameters=[{'robot_description': robot_description}]
)
# 通过 IncludeLaunchDescription 包含另外一个 launch 文件
launch_gazebo = launch.actions.IncludeLaunchDescription(
PythonLaunchDescriptionSource([get_package_share_directory(
'gazebo_ros'), '/launch', '/gazebo.launch.py']),
# 传递参数
launch_arguments=[('world', default_world_path),('verbose','true')]
)
# 请求 Gazebo 加载机器人
spawn_entity_node = launch_ros.actions.Node(
package='gazebo_ros',#功能包名字
executable='spawn_entity.py',#可执行文件名字
arguments=['-topic', '/robot_description',#依赖
'-entity', robot_name_in_model, ])
# 加载并激活 fishbot_joint_state_broadcaster 控制器
load_joint_state_controller = launch.actions.ExecuteProcess(
cmd=['ros2', 'control', 'load_controller', '--set-state', 'active',
'fishbot_joint_state_broadcaster'],
output='screen'
)
# 加载并激活 fishbot_effort_controller 控制器
load_fishbot_effort_controller = launch.actions.ExecuteProcess(
cmd=['ros2', 'control', 'load_controller', '--set-state', 'active','fishbot_effort_controller'],
output='screen')
load_fishbot_diff_drive_controller = launch.actions.ExecuteProcess(
cmd=['ros2', 'control', 'load_controller', '--set-state', 'active','fishbot_diff_drive_controller'],
output='screen')
return launch.LaunchDescription([
action_declare_arg_mode_path,
robot_state_publisher_node,
launch_gazebo,
spawn_entity_node,
# 事件动作,当加载机器人结束后执行
launch.actions.RegisterEventHandler(
event_handler=launch.event_handlers.OnProcessExit(
target_action=spawn_entity_node,
on_exit=[load_joint_state_controller],)
),
# 事件动作,load_fishbot_diff_drive_controller
launch.actions.RegisterEventHandler(
event_handler=launch.event_handlers.OnProcessExit(
target_action=load_joint_state_controller,
on_exit=[load_fishbot_diff_drive_controller],)
),
])
使用gazebo标签扩展URDF
<xacro:macro name="laser_xacro" params="xyz">
<gazebo reference="laser_cylinder link">
<material>Gazebo/Black</material>
</gazebo>
<gazebo reference="laser link">
<material>Gazebo/Black</material>
</gazebo>
···
</xacro:macro>使用gazebo插件 (宏)
#gazebo插件格式:
<gazebo>
<plugin name='diff_drive' filename:'libgazebo_ros diff drive.so'>
<ros>
<namespace>/</namespace>
<remapping>cmd_vel:=cmd_vel</remapping>
<remapping>odom:=odom</remapping>
</ros>
</plugin>
</gazebo>
#以下是一个 使用两轮差速插件控制机器人 实例:
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro">
<xacro:macro name="gazebo_control_plugin">
<gazebo>
<!-- 插件名,插件文件名 --> <!-- 这里用了gazebo的插件,两轮差速驱动插件 -->
<plugin name='diff_drive' filename='libgazebo_ros_diff_drive.so'>
<ros>
<namespace>/</namespace>
<remapping>cmd_vel:=cmd_vel</remapping> <!-- 重映射/重命名 -->
<remapping>odom:=odom</remapping>
</ros>
<update_rate>30</update_rate>
<!-- wheels -->
<left_joint>left_wheel_joint</left_joint>
<right_joint>right_wheel_joint</right_joint>
<!-- kinematics运动学 -->
<wheel_separation>0.2</wheel_separation>
<wheel_diameter>0.064</wheel_diameter>
<!-- limits -->
<max_wheel_torque>20</max_wheel_torque>
<max_wheel_acceleration>1.0</max_wheel_acceleration>
<!-- output -->
<publish_odom>true</publish_odom>
<publish_odom_tf>true</publish_odom_tf>
<publish_wheel_tf>true</publish_wheel_tf>
<odometry_frame>odom</odometry_frame>
<robot_base_frame>base_footprint</robot_base_frame>
</plugin>
</gazebo>
</xacro:macro>
</robot>
ros2_control介绍与安装
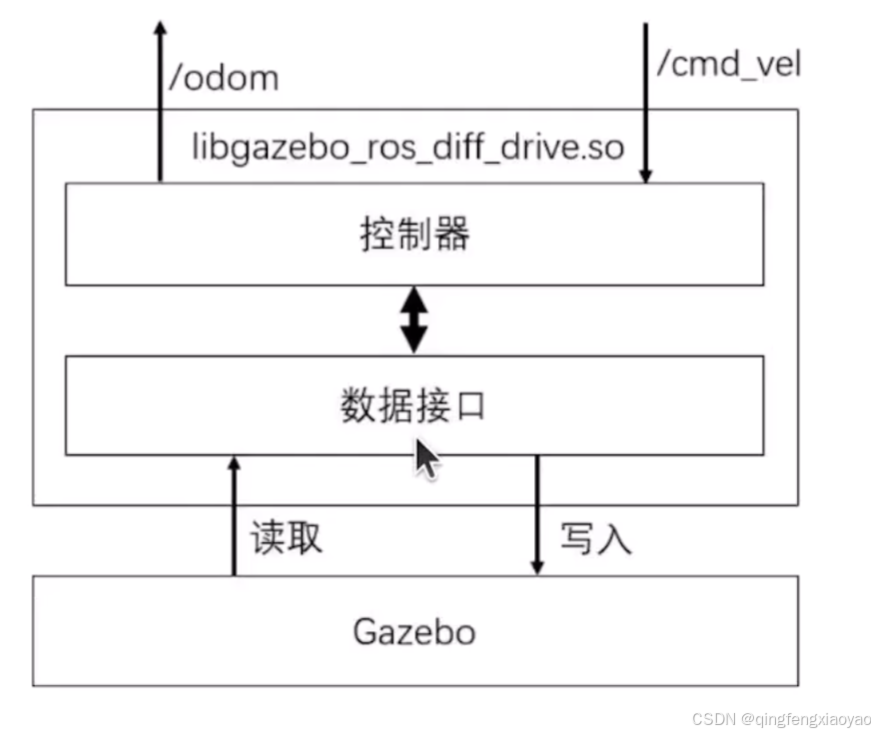
gazebo插件模式架构
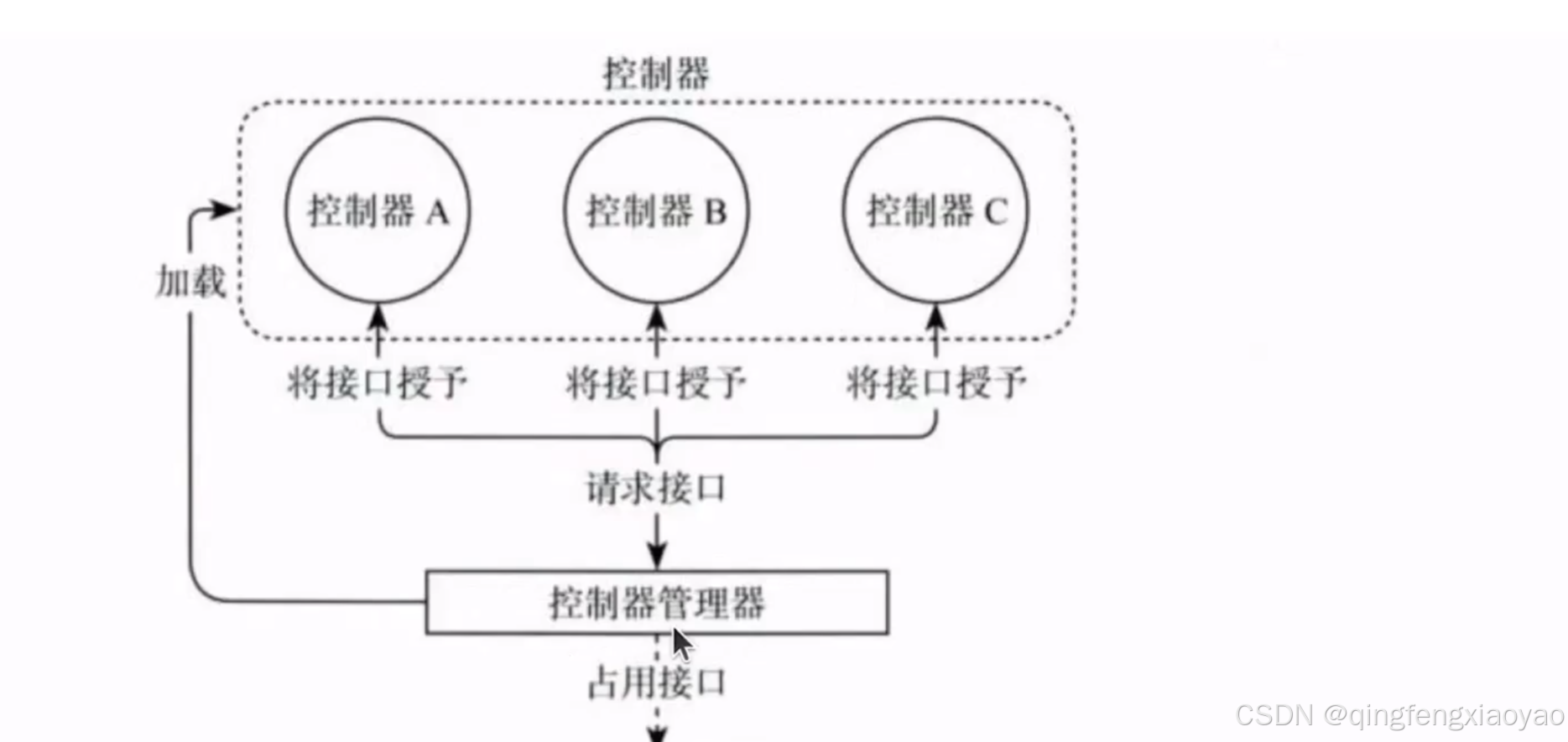
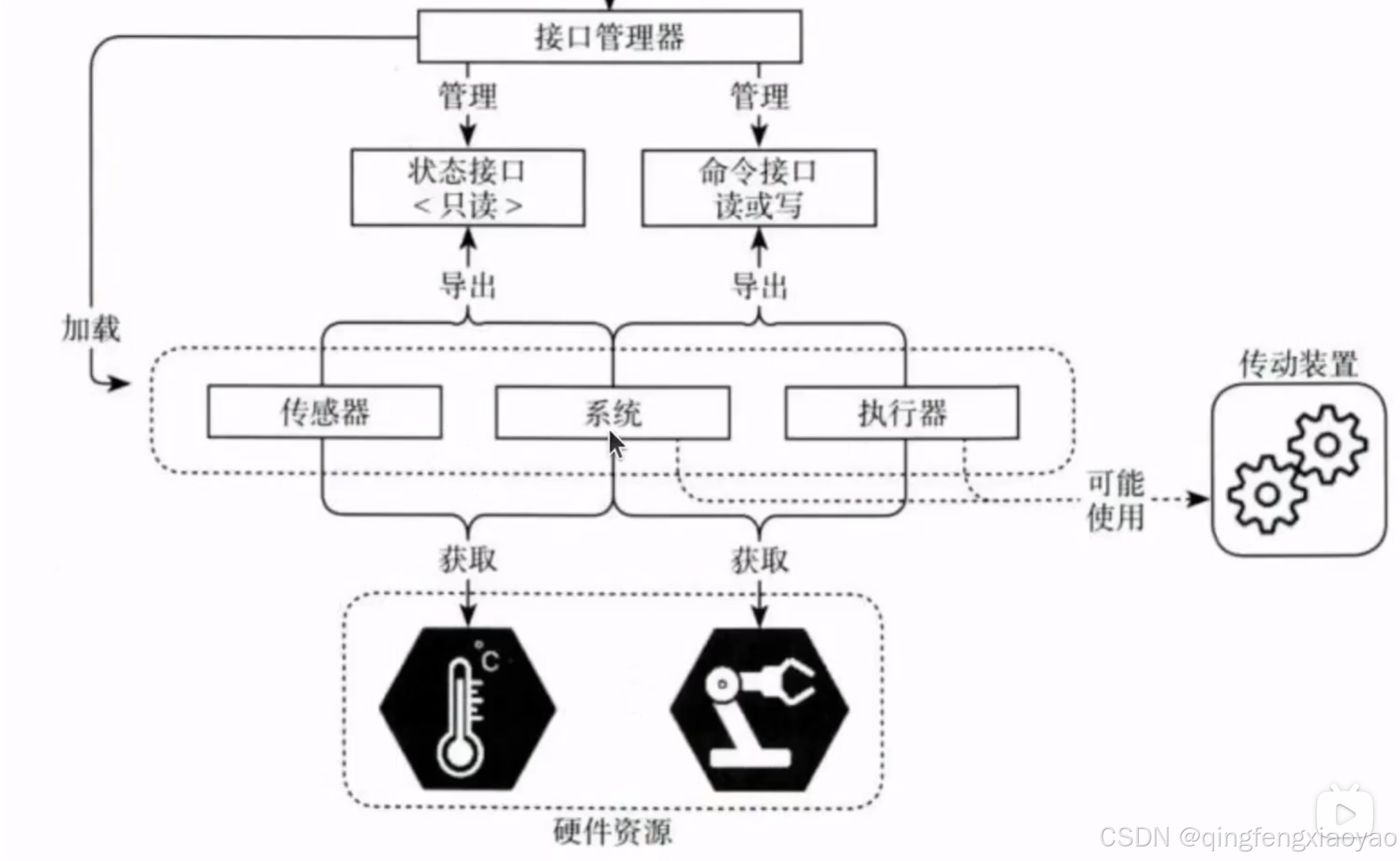
ros2_control模式架构
安装代码
sudo apt install ros-$ROS_DISTRO-ros2-control
sudo apt install ros-$ROS_DISTRO-ros2-controllers
Gazebo接入ros2_control
Gazebo接入ros2_control,其实就是让Gazebo按照rcs2_control指定的接口提供数据。在ROS 2中利用相应的Gazebo插件,可以方便的实现Gazebo和ros2_control的对接。
安装代码
sudo apt install ros-$ROS_DISTRO-gazebo-ros2-controlros2_control的宏(使用gazebo 介入ros2_control)
<!-- 使用gazebo 介入ros2_control -->
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro">
<!-- 定义了一个fishbot_ros2_control 宏,标签ros2_control 描述硬件资源。 -->
<xacro:macro name="fishbot_ros2_control">
<ros2_control name="FishBotGazeboSystem" type="system">
<!-- 驱动库 -->
<hardware>
<plugin>gazebo_ros2_control/GazeboSystem</plugin>
</hardware>
<!-- 下面的关节joint,定义了左右两个轮子,有控制接口跟状态接口。 -->
<joint name="left_wheel_joint">
<!-- 命令接口 -->
<command_interface name="velocity">
<param name="min">-1</param>
<param name="max">1</param>
</command_interface>
<command_interface name="effort">
<param name="min">-0.1</param>
<param name="max">0.1</param>
</command_interface>
<!-- 状态接口 -->
<state_interface name="position" />
<state_interface name="velocity" />
<state_interface name="effort" />
</joint>
<joint name="right_wheel_joint">
<command_interface name="velocity">
<param name="min">-1</param>
<param name="max">1</param>
</command_interface>
<command_interface name="effort">
<param name="min">-0.1</param>
<param name="max">0.1</param>
</command_interface>
<state_interface name="position" />
<state_interface name="velocity" />
<state_interface name="effort" />
</joint>
</ros2_control>
<!-- 插件 -->
<!-- 下面的gazebo标签定义了用来解析ros2_control的标签的插件。里面的参数需要config目录新建文件:fishbot_ros2_controller.yaml -->
<gazebo>
<plugin filename="libgazebo_ros2_control.so" name="gazebo_ros2_control">
<parameters>$(find fishbot_description)/config/fishbot_ros2_controller.yaml</parameters>
<ros>
<remapping>/fishbot_diff_drive_controller/cmd_vel_unstamped:=/cmd_vel</remapping><!-- 重映射 -->
<remapping>/fishbot_diff_drive_controller/odom:=/odom</remapping>
</ros>
</plugin>
</gazebo>
</xacro:macro>
</robot>
ros2 control 命令
#加载控制器
ros2 control load_controller --set-state configure fishbot_diff_drive_controller
#启动已加载的控制器
ros2 control set_controller_state fishbot_diff_drive_controller start
#一次性加载并启动控制器
ros2 control load_start_controller fishbot_diff_drive_controller
导航
构建第一张导航地图
sudo apt install ros-$ROS_DISTRO-slam-toolbox
ros2 launch slam_toolbox online_async_launch.py use_sim_time:=True将地图保存为文件
room.yaml
image: room.pgm
mode: trinary #类型
resolution: 0.05 #分辨率 5cm
origin: [-10.4, -6.53, 0] #地图原点
negate: 0 #是否对地图进行取反 0表示不取反
occupied_thresh: 0.65 #占据,自由,未知之间的分界线
free_thresh: 0.25 #占据,自由,未知之间的分界线 机器人导航框架Navigation 2
编写launch并启动导航
# 导入操作系统接口库(用于文件路径处理)
import os
# 导入ROS 2核心启动模块(定义节点、参数等基础功能)
import launch
# 导入ROS 2节点操作模块(包含Node、LifecycleNode等关键类)
import launch_ros
# 从ament索引工具获取ROS 2包的资源路径(如package.xml所在目录)
from ament_index_python.packages import get_package_share_directory
# 支持包含其他Python格式的launch文件(用于模块化启动设计)
from launch.launch_description_sources import PythonLaunchDescriptionSource
def generate_launch_description():
# 获取与拼接默认路径
fishbot_navigation2_dir = get_package_share_directory(
'fishbot_navigation2')# 获取功能包的路径
nav2_bringup_dir = get_package_share_directory('nav2_bringup')
rviz_config_dir = os.path.join(
nav2_bringup_dir, 'rviz', 'nav2_default_view.rviz')
# 创建 Launch 配置
use_sim_time = launch.substitutions.LaunchConfiguration(
'use_sim_time', default='true')#是否使用仿真时间
map_yaml_path = launch.substitutions.LaunchConfiguration(
'map', default=os.path.join(fishbot_navigation2_dir, 'maps', 'room.yaml'))
nav2_param_path = launch.substitutions.LaunchConfiguration(
'params_file', default=os.path.join(fishbot_navigation2_dir, 'config', 'nav2_params.yaml'))
return launch.LaunchDescription([
# 声明新的 Launch 参数
# 声明ROS 2启动参数:仿真时间开关 # 作用:控制节点是否使用仿真时间(如Gazebo/Webots等),而非系统实时时钟
launch.actions.DeclareLaunchArgument(
'use_sim_time', # 参数名称(需与节点参数名一致)
default_value=use_sim_time, # 默认值应为字符串(ROS 2自动转换类型)
description='Use simulation (Gazebo) clock if true' # 参数描述(命令行中通过-h查看)
),
launch.actions.DeclareLaunchArgument(
'map', # 参数名称(需与节点参数名一致)
default_value=map_yaml_path,# 导航参数文件默认路径
description='地图文件完整路径' # 参数用途说明
),
launch.actions.DeclareLaunchArgument(
'params_file',
default_value=nav2_param_path,# 导航参数文件默认路径
description='参数文件完整路径' # 参数用途说明
),
# 包含Nav2的启动文件
launch.actions.IncludeLaunchDescription(
PythonLaunchDescriptionSource(
[nav2_bringup_dir, '/launch', '/bringup_launch.py'# Nav2主启动文件路径
]),
# 使用 Launch 参数替换原有参数
launch_arguments={
'map': map_yaml_path,# 覆盖地图路径参数
'use_sim_time': use_sim_time,# 仿真时间设置
'params_file': nav2_param_path# 覆盖参数文件路径
}.items(),# 将字典转换为键值对列表
),
# 启动RViz2可视化工具
launch_ros.actions.Node(
package='rviz2',
executable='rviz2',
name='rviz2', # 节点名称
arguments=['-d', rviz_config_dir],# 指定RViz配置文件
parameters=[{'use_sim_time': use_sim_time}],# 传递仿真时间参数
output='screen'),# 输出显示在控制台
])

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









