










系统简介
随着我国经济的发展,国民汽车保有量不断提高,我国许多城市出现了交通拥堵的情况。交通信号灯是保障安全高效的交通秩序的重要工具,最早的交通灯是煤气交通信号灯,只有红绿两种颜色,需要人工操作而且危险。当然,随着时代的发展,交通信号灯的组成以及控制手段都发生了很大的改变。PLC作为人工智能时代的典型代表,在自动化领域是不可或缺的存在,在交通控制领域也占有着极其重要的地位。因此,本设计提出基于PLC控制的智能交通控制系统的设计和实现。为了达到设计要求、节约成本,本设计用西门子S7-200来控制交通灯的变化,采用梯形图的方式来编写程序,并结合人机界面实现有效的监控。
关键词:西门子S7-200;智能交通;梯形图
一、系统硬件分析
基于PLC控制的智能交通控制系统所用到的主要硬件有PLC和触摸屏。本设计用到的PLC是西门子S7-200系列的PLC,其CPU型号为224,触摸屏是广州致远公司的MiniHMI-1000系列触摸屏,下面我将对它们作详细介绍,并且对I/O地址的分配和PLC的接线作初步说明。
(一)PLC概述
PLC是可编程逻辑控制器,其硬件结构基本上与微型计算机相同。它是在工业控制领域有十分突出的地位,目前比较出名的PLC有西门子、三菱、欧姆龙等,我国国内也有许多PLC的品牌,相比来说价格低廉,也有很多人在使用,但质量良莠不齐,一些使用规格和平常不一样,造成国内品牌口碑不佳。所以选用了西门子的S7-200系列PLC作为本设计的硬件核心。
- PLC的特点以及构成
S7-200系列PLC是一种小型的PLC,相比于其他的电气控制器,它具有结构设计紧凑、扩展性能好、功能模块丰富、指令系统强大以及价格低廉的特点,特别适合初学者使用与研究。S7-200系列PLC的CPU22*是CPU主机,该模块包括中央处理器CPU、数字I/O、通信口和电源。
2.CPU224的介绍
CPU是PLC的核心,主要由运算器、控制器、寄存器及实现它们之间联系的数据、控制及状态总线构成,本设计需要用到的是S7-200系列的CPU224:

图2.1 CPU224
3.PLC程序的编辑工具
系统的上位机PC机即我们的计算机作为编辑工具,首先运行STEP7 Micro/WIN V4.0编程软件,对PLC进行开发应用,编辑智能交通控制系统的运行程序。在编辑好程序后,打开S7-200仿真软件对系统进行调试,监控系统是否正常运行,及时修改。
4.PLC的通信
PLC通信可以分为PLC与PLC之间的通信,PLC和上位机通信还有PLC与其他智能设备的通信,本设计是PLC和上位机通信与PLC和触摸屏的通信PLC和上位机通信,就是我们下载到电脑所使用的STEP7 Micro/WIN V4.0编程软件,编辑好程序后,下载到PLC或者从PLC上载程序到电脑端的过程。PLC和触摸屏的通信是两者之间实现信息的交换;S7-200系列PLC通信协议是PPI协议,串口通信口为RS485口,计算机可以通过STEP7 Micro/WIN V4.0编程软件访问S7-200 CPU,从而实现通信;触摸屏与PLC采用的串口通信接口是RS232/485通信电缆,过程需要给触摸屏上24V电。
(二)人机界面
人机界面采用的是广州致远的 MiniHMI-1000系列触摸屏,PLC与MiniHMI-1000系列触摸屏的人机界面开发所需软硬件设备配置需要安装有Windows XP操作系统的个人计算机;需要组态开发软件:HMI Developer Suite(以下简称HDS)、 MiniHMI-1000系列人机界面、西门子PLC S7-200 CPU224XP CN和串口通信电缆以及以太网下载电缆。由于目前缺乏实物,只作软件设计部分。
(三)电感式传感器
本设计使用电感式传感器來检测车辆的存在,当车辆通过电感式传感器时,传感器将压力转化为磁阻变化,将模拟量输入转化为数字量输出。在车流量的计算中用到电感式传感器,一组传感器中要有一个放置在十字路口交叉点,另一个要与它保持一定距离,当车辆经过时,我们就能得出车流量的数值。车流量的计算是智能交通控制系统的关键,和传统的定时循环系统相比,本设计在根据车流量来调整信号灯时序,在车流量偏高即高峰期时,延长南北绿灯时间或者东西绿灯时间,使车辆排队恢复到平峰期状态。
(四)交通灯控制系统设计
1.控制要求
基于PLC控制的智能交通控制系统所控制的是十字路口的交通灯,每个路口都是双向车道,下图为路况示意图:
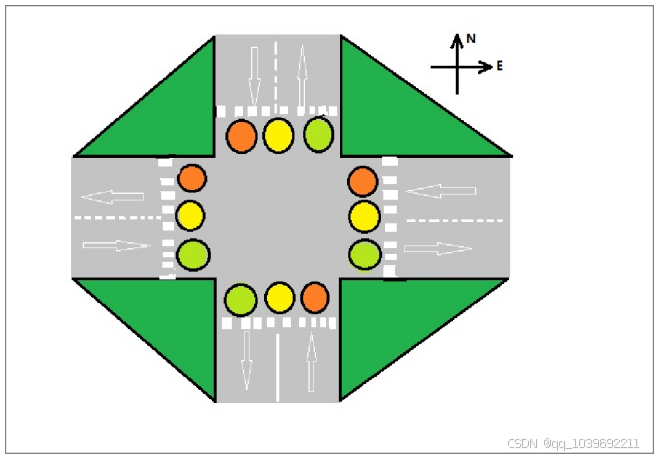
图2.2 路况示意图
3.PLC接线图
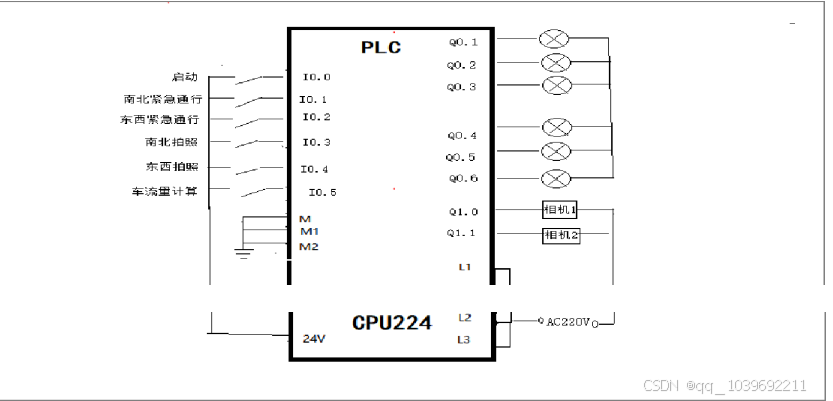
图2.3 PLC接线图
I0.0为接入启动的传输信号,I0.1为接入南北紧急通行的传输信号,I0.2为接入东西紧急通行的传输信号,I0.3为接入南北拍照的传输信号,I0.4为接入东西拍照的传输信号,I0.5接车流量计算。Q0.1接南北红灯,Q0.2接东西绿灯,Q0.3接东西黄灯,Q0.4接南北绿灯,Q0.5接东西红灯,Q0.6接南北黄灯,Q1.0接相机1拍照,Q1.1接相机2拍照。因为CPU224的输入输出点足以满足系统设计需求,我们也就无需加入I/O拓展模块了。程序的设计操作者对每个输入输出端口有清晰的认识和记忆,I/O分配表和PLC接线图更加清晰地表现出智能交通控制系统硬件细节的部分,能够让人迅速找到某个触点的位置,方便我们记忆与整理。
二、智能交通控制系统的软件设计
西门子PLC的编程软件是STEP7 Micro/win 、STEP7 Micro/win SMART、STEP7 V5.5和STEP7 V11,其中STEP7 Micro/win是西门子S7- 200的编程软件,本设计用到的是STEP7 Micro/WIN V4.0编程软件,它支持LAD、FBD和STL语言,我们用到LAD即语言进行程序编辑。根据基于PLC控制的智能交通控制系统的设计要求,作者首先确定了主程序的流程,而主程序中又包含了正常时序流程和自动调整流程。
(一)主程序
当车流量在0-45辆/s时,是平峰期,采用正常时序循环控制,当车流量在45辆/s以上时,是高峰期,根据车流量自动调整。每当灯置红时,相机抓拍,使用信号沿控制。如果有南北紧急通行或者东西紧急通行的信号传入,该方向的绿灯亮起,需要重置南北/东西方向的信号,绿灯才会熄灭。如果有南北拍照或者东西拍照的信号传入,相机1或相机2也可以进行手动拍照。主要思路如下:按下启动按钮IO.0,车辆检测器IO.5检测到车流量存在,并将其数据传送到PLC中,PLC通过计算得到车流量σ,当σ 小于等于45的时候执行正常时序流程,而σ大于45的时候执自动调整流程。车流量的检测是一直不断地进行下去的,当自动调整流程使σ减小,直到σ小于等于45的时候,返回到正常时序流程,这两个程序不断进行。当有需要紧急通行的时候,我们按下南北紧急通行按钮IO.1,可以使南北绿灯亮起来;我们按下东西紧急通行按钮IO.2,可以使东西绿灯亮起来。每次南北方向绿灯结束的时候,南北相机自动拍照,我们按下南北拍照按钮IO.3也可以使南北相机拍照。每次东西方向绿灯结束的时候,东西相机自动拍照,我们按下东西拍照按钮IO.4也可以使东西相机拍照。紧急通行和拍照可以作为中断,不影响正常时序和自动调整的流程。
(二)正常时序
按下启动按钮后,一开始是南北红灯亮长亮25秒,这25秒里面东西绿灯先亮20秒,然后东西绿灯闪烁3秒,然后东西接绿灯熄灭,紧接着东西黄灯亮,并维持2秒,东西黄灯熄灭、南北红灯熄灭,这个过程持续25秒。下一个25秒中,东西红灯亮长亮25秒,这25秒里面南北绿灯先亮20秒,然后南北绿灯闪烁3秒,然后南北接绿灯熄灭,接着南北黄灯亮,并维持2秒,南北黄灯熄灭、东西红灯熄灭,这个过程也是持续25秒。上述动作循环进行,一个正常时序的时间长度是50s。正常时序是程序设定好的,当没有其他数据输入干扰时,将一直循环执行。这是比较死板的程序控制,在过去交通控制系统没有智能化的时候,类似正常时序这种定时循环控制相当普遍。如今,因为这种定时循环的绿占比低,红灯时间长,单位时间内通过的车辆数少,所以它只能适用于车辆较少的平峰期。对于高峰期来说,最好是根据车辆來控制交通信号灯相位,因为城市道路交通的路面状况并不是均匀的,大多数时候的高峰期是某一方向的车辆激增,而另外的方向车辆减少,如果交通系统继续采用定时循环控制,会大大增加车辆排队长度,造成交通拥堵。由此,本设计提出在某一方向车流量超过45辆/s时,延长其绿灯时间,让车辆迅速通过,减少排队时间,达到过段时间后该方向车流量减少的要求。
(三)自动调整
按下启动按钮后,正常时序控制,此时车流量计算已经开始,检测经过各路口车流量数。判断南北方向车流量是否溢满,如果没有溢满,车流量数少于等于45,则继续执行正常时序流程;如果溢满,当车流量数>45的时候启动45s计时器延长南北方向的绿灯时间;45s计时器动作完成后,再次判断车流量是否溢满,如果没有溢满,车流量数少于等于45,则返回执行正常时序流程;如果溢满,当车流量数>45的时候启动45s计时器延长南北方向的绿灯时间,如此循环。判断东西方向车流量是否溢满,如果没有溢满,车流量数少于等于45,则继续执行正常时序流程;如果溢满,当车流量数>45的时候启动45s计时器延长东西方向的绿灯时间;计时器动作完成后,再次判断车流量是否溢满,如果没有溢满,车流量数少于等于45,则返回执行正常时序流程;如果溢满,当车流量数>45的时候启动45s计时器延长东西方向的绿灯时间,如此循环。车流量的计数是一直存在的,在接通45s计时器后,车辆检测仍然在进行,45s计时器动作后,车流量没有溢满才跳出延长绿灯的循环。
智能交通控制系统自动调整流程是有关于车流量控制的设计,该流程中包含正常时序和绿灯延长,可以在平峰期和高峰期状态中自由切换。使用这种控制手段的交通控制系统明显能在高峰期通过更多的车辆,极大程度地减少车辆排队时间,节约了许多宝贵的时间, 带来巨大的经济效益和时间效益。这种以人为本、人性化、可以自动调节的控制手段,我们称之为智能化。车流量的计算是基于PLC 控制智能交通控制系统的智能化体现的关键,我们用S7-200系列的PLC可以实现。
(四)PLC编程程序
本设计用到STEP7 Micro/WIN V4.0编程软件,使用了梯形图作为控制程序。因为梯形图相较于工业控制领域的其它编程语言来说,编程中逻辑设计更加直观明了,更加方便快捷,它的流概念的思维让设计者或者读者更能很好的了解程序的逻辑,完成控制要求。PLC 是通过STEP7 Micro/WIN V4.0编程软件编写好的程序进行对智能交通控制系统进行控制的,所以简单明了的程序对于PLC处理和运行有着至关重要的作用。STEP7 Micro/WIN V4.0编程软件支持梯形图和语句表的相互转化,通过观察梯形图来了解实现的功能的同时STL语句表可以让读者或者设计者明白程序的逻辑,了解智能交通控制系统的实现流程。由于过去复杂的电气控制接线已经无法满足人们对简单明了的控制系统的渴望与要求,特别是亚洲地区的技术人员表示需要编程逻辑更加直观的设计语言,梯形图编程语言应运而生,梯形图在继承继电器控制系统的优点的同时改进了程序的复杂性,使逻辑更加简单清晰,使功能更加容易实现,特别满足亚洲人的直线思维,受到世界各地广大电气领域的技术人员的喜爱与广泛应用。在智能交通控制系统程序的设计过程中,梯形图网络由各种基本逻辑指令和数字运数指令以及计时器等组成。能流在设计好的梯形图程序中流转,会经过触点到达线圈、计数器、定时器等位置,当PLC检测到相应器件发生动作时,CPU会进行处理这些信息,使之经过一定的逻辑关系然后输出信号。能流与程序的执行顺序都是先由左至右或由上至下,编程时我们还可以为梯形图某个触点、线圈或者功能块加上注释,方便读者在更加充分了解程序的逻辑关系,或者让设计者在调试过程中查询错误的时候迅速找到位置。
三、调试
调试是PLC系统设计必不可少的过程,是检验我们系统设计的有效性的重要手段。对于程序来说,一个程序能正常运行是最基本的要求,我们不单要程序能正常运行,更需要它解决我们所提出的问题。软件调试就是检查程序能否按我们的要求去控制各个组件,使它能够及时作出反应。硬件调试主要检查实物与程序之间的连接与实际使用情况是否与设计要求相符合。对基于PLC控制的智能交通控制系统的调试分为硬件调试和软件调试,我们主要是对软件调试做说明。
(一)硬件调试
在此仅提出硬件调试的思路:首先目测元件是否完好,连接线是否已经全部连接?有无错接?接着给元件加电,用万用表测试连接点,查看所有连接点是否正常。然后连机测试,看智能交通控制系统能否正常使用。如果出现异常,应该按照先分后合原则和就近原则去处理,分步测试各单元,按照逻辑距离由近到远,一步一步排查。
(二)软件调试
软件调试是在梯形图程序设计好以后执行程序是否存在语法或者逻辑错误。然后用STEP7 Micro/WIN V4.0将已经编写好的程序导出为.awl的格式,到S7-200模拟器中选择双击西门子CPU区域选择CPU型号为CPU224,导入程序,选择导入程序块,将CPU设为运行模 式,进行系统功能测试。在这里我们可以打开语句表或者梯形图来查看程序,点击程序监控状态按钮,可以看到PLC的运行状态,蓝色代表接通。
结论
智能交通控制系统涉及电气控制技术领域内的PLC控制,与我们的日常生活密切相关,我们要建立起从身边挖掘和发现新事物的理念。独立完成本设计,结合软件和硬件以及人机界面的综合性调试任务,有助于设计者独立建立工程的经验,有助于更加了解控制系统内部的细节技术问题。我更加深刻地体会到模型的运作需要创造怎样的硬件条件和结合软件实现逻辑功能。完成这个设计对我来说是艰辛而又充满喜悦的,从无到有的过程很漫长,但是偶然发现的不了解知识突然明白了让人欢呼雀跃忘乎所以。PLC是新时代控制领域的一个典型,是现代工业生产工艺的重要工具,是当代理工科大学生必需学习了解的知识。智能交通控制模型能很好地体现出PLC自身的特点,增强我们对PLC控制的认识,加强我们对本专业知识的巩固和实践。未来,基于PLC的智能交通控制系统还会有很多的改进,让我们努力学习,继续前行,为新时代社会主义现代化作贡献。在不久的将来,我们就要面临人生重要的转折点,我希望走向社会的自己不要忘记在学校学到的知识和能力,坚持自主学习,充实完善自我;不要忘记本次设计给予的经验和教训,在发现错误和用于改进中成长。不论将来是起是落,我们都不要骄傲自大或者妄自菲薄,要保持平常心,理智看待身边事物。不要急功近利,要坚定不移地坚持自己的理想和信念,不忘初心,方得始终。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









