







安装节点:
安装后的节点如下:
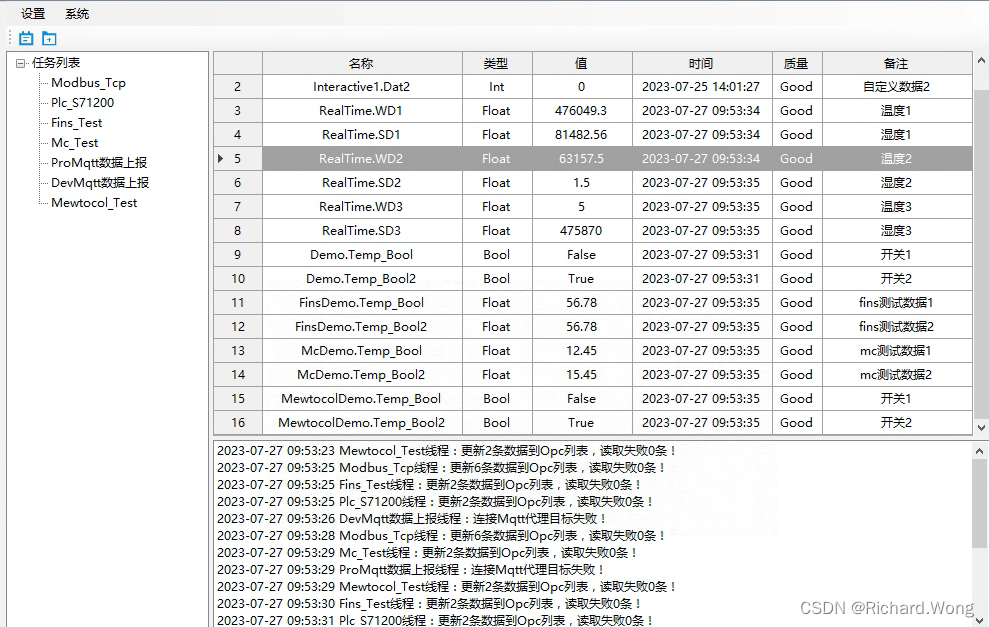
运行自主研发的工业数据交互软件,使用C#开发,可将各类协议转成Opc Da。
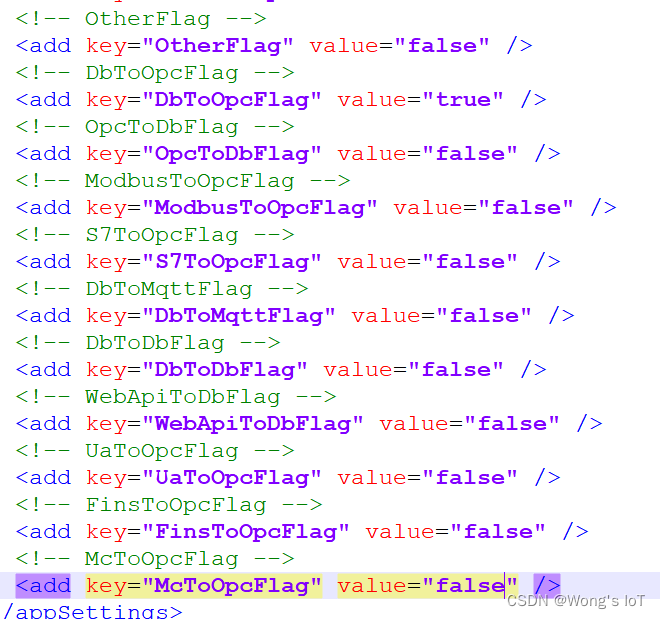
支持的功能如下:
软件运行后如下;
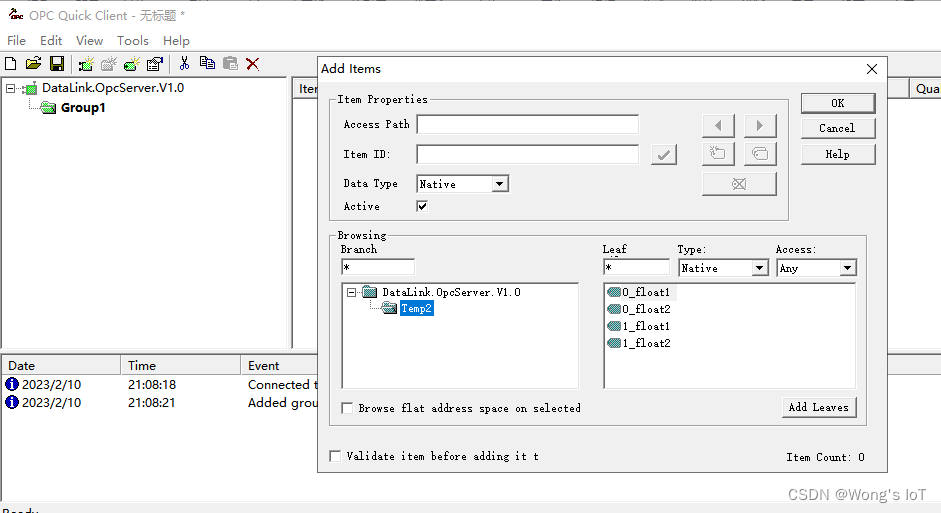
数据库转成的OPC数据:
安装节点:
安装后的节点如下:
运行自主研发的工业数据交互软件,使用C#开发,可将各类协议转成Opc Da。
支持的功能如下:
软件运行后如下;
数据库转成的OPC数据:
 1142
1142











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





 订阅专栏 解锁全文
订阅专栏 解锁全文























