









什么是通讯协议?
通讯协议又称通信规程,是指通信双方对数据传送控制的一种约定。约定中包括对数据格式,同步方式,传送速度,传送步骤,检纠错方式以及控制字符定义等问题做出统一规定,通信双方必须共同遵守,它也叫做链路控制规程。
电脑与电脑之间的沟通必须讲述相同的语言,才能互相传输信息,自然资料在国际互联网上传递,每一份都要符合一定的规格(即是相同的语言),否则中国送出的资料,在美国那边要怎么收下呢?
这些规格(语言)的规定都是事先在会议上讲好的,一般我们称之为“协议”(英文称为protocol),而这种在网络上负责定义资料传输规格的协议,我们就统称为通讯协议。
一句话就是,双方按照同样的约定去做一件事情。
如何定义通讯协议
这里小飞哥只简单介绍一下思路及比较简单的通讯协议,让小伙伴们有个了解,学会举一反三。
以MODBUS协议为例,我们看下一般协议的组成部分:
拿16功能码,写多个寄存器指令为例:

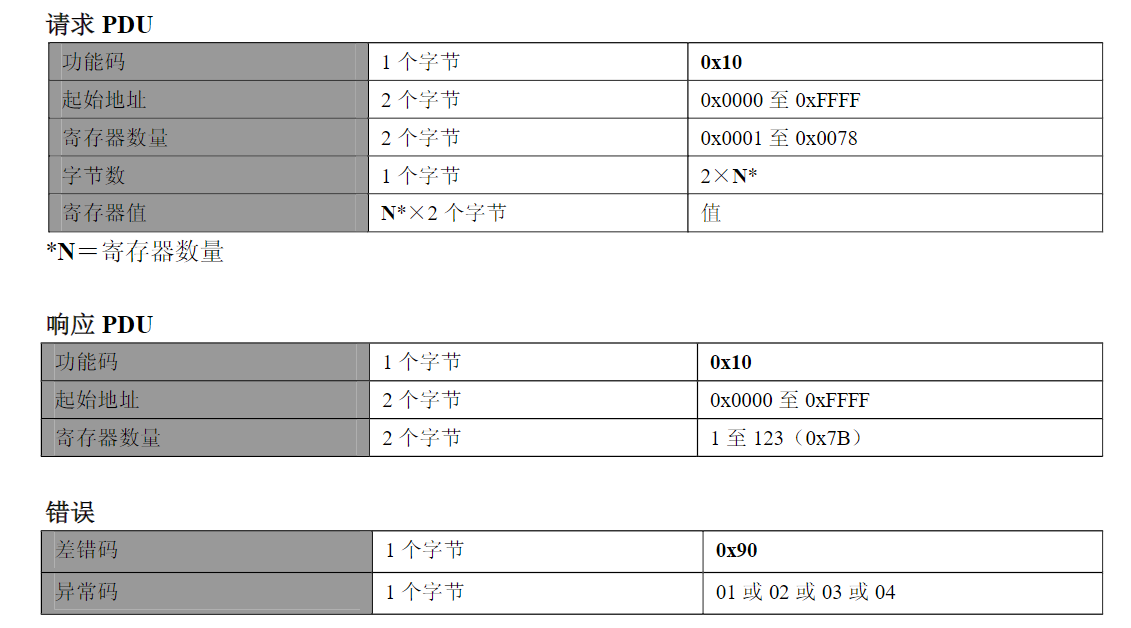
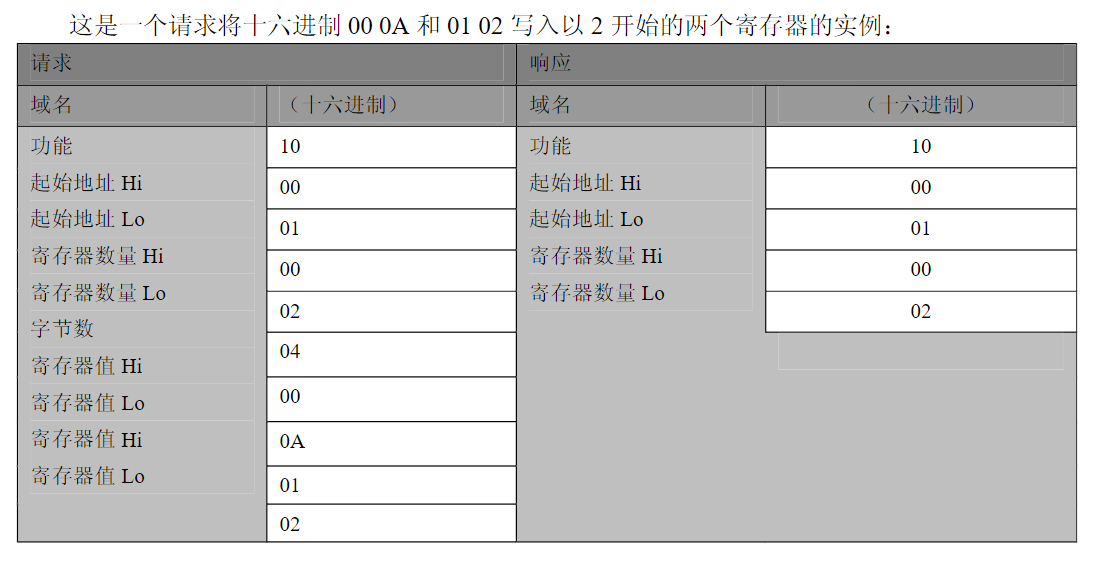
其中包括了:
地址码:1字节
功能码:1字节
起始地址:2字节
寄存器数量:2字节(即是数据段长度)
字节数:寄存器数量 * 2
寄存器值:数据
CRC校验:2字节
总结起来就是包含了地址码、功能码、数据长度、数据、校验码等要素
数据发出去一般需要接收方有个回音,确认是否接收到数据及数据是否正确,也即是上面的相应PDU、错误响应
模仿modbus协议,我们来制定字节的通讯协议,这里所说的通讯协议是应用层的,串口本身就是一种协议,采用以下的格式来定义:
数据头(2字节)+数据长度(1字节)+功能码+数据+校验码(CRC16-MODBUS)
数据头:可以采用常用的5A A5 AA 55 55 AA等,为什么采用这两个值呢,是有一定讲究的,我们增加数据头的目的是为了确认数据包是我们需要的,这个数据头受干扰出错的话要比较容易识别,从二进制来看
0xaa是1010 1010
0x55是0101 0101
在通讯编码原理中,应该尽可能避免过多的重复0或1,因为当你的传输变成一个长0/1时,一个脉冲干扰就会将你的数据截断,整加误码的机会。
这样,我们就以以下数据格式为例,进行解析:
数据格式:
AA 55 07 01 11 23 88 98 8A 9C
CRC16-MODBUS校验计算
这部分就不废话了,直接看代码就可以了,可以用查表法,也可以直接计算
查表法:
#include "crc.h"
static const unsigned char aucCRCHi[] = {
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40,
0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40
};
static const unsigned char aucCRCLo[] = {
0x00, 0xC0, 0xC1, 0x01, 0xC3, 0x03, 0x02, 0xC2, 0xC6, 0x06, 0x07, 0xC7,
0x05, 0xC5, 0xC4, 0x04, 0xCC, 0x0C, 0x0D, 0xCD, 0x0F, 0xCF, 0xCE, 0x0E,
0x0A, 0xCA, 0xCB, 0x0B, 0xC9, 0x09, 0x08, 0xC8, 0xD8, 0x18, 0x19, 0xD9,
0x1B, 0xDB, 0xDA, 0x1A, 0x1E, 0xDE, 0xDF, 0x1F, 0xDD, 0x1D, 0x1C, 0xDC,
0x14, 0xD4, 0xD5, 0x15, 0xD7, 0x17, 0x16, 0xD6, 0xD2, 0x12, 0x13, 0xD3,
0x11, 0xD1, 0xD0, 0x10, 0xF0, 0x30, 0x31, 0xF1, 0x33, 0xF3, 0xF2, 0x32,
0x36, 0xF6, 0xF7, 0x37, 0xF5, 0x35, 0x34, 0xF4, 0x3C, 0xFC, 0xFD, 0x3D,
0xFF, 0x3F, 0x3E, 0xFE, 0xFA, 0x3A, 0x3B, 0xFB, 0x39, 0xF9, 0xF8, 0x38,
0x28, 0xE8, 0xE9, 0x29, 0xEB, 0x2B, 0x2A, 0xEA, 0xEE, 0x2E, 0x2F, 0xEF,
0x2D, 0xED, 0xEC, 0x2C, 0xE4, 0x24, 0x25, 0xE5, 0x27, 0xE7, 0xE6, 0x26,
0x22, 0xE2, 0xE3, 0x23, 0xE1, 0x21, 0x20, 0xE0, 0xA0, 0x60, 0x61, 0xA1,
0x63, 0xA3, 0xA2, 0x62, 0x66, 0xA6, 0xA7, 0x67, 0xA5, 0x65, 0x64, 0xA4,
0x6C, 0xAC, 0xAD, 0x6D, 0xAF, 0x6F, 0x6E, 0xAE, 0xAA, 0x6A, 0x6B, 0xAB,
0x69, 0xA9, 0xA8, 0x68, 0x78, 0xB8, 0xB9, 0x79, 0xBB, 0x7B, 0x7A, 0xBA,
0xBE, 0x7E, 0x7F, 0xBF, 0x7D, 0xBD, 0xBC, 0x7C, 0xB4, 0x74, 0x75, 0xB5,
0x77, 0xB7, 0xB6, 0x76, 0x72, 0xB2, 0xB3, 0x73, 0xB1, 0x71, 0x70, 0xB0,
0x50, 0x90, 0x91, 0x51, 0x93, 0x53, 0x52, 0x92, 0x96, 0x56, 0x57, 0x97,
0x55, 0x95, 0x94, 0x54, 0x9C, 0x5C, 0x5D, 0x9D, 0x5F, 0x9F, 0x9E, 0x5E,
0x5A, 0x9A, 0x9B, 0x5B, 0x99, 0x59, 0x58, 0x98, 0x88, 0x48, 0x49, 0x89,
0x4B, 0x8B, 0x8A, 0x4A, 0x4E, 0x8E, 0x8F, 0x4F, 0x8D, 0x4D, 0x4C, 0x8C,
0x44, 0x84, 0x85, 0x45, 0x87, 0x47, 0x46, 0x86, 0x82, 0x42, 0x43, 0x83,
0x41, 0x81, 0x80, 0x40
};
uint16_t CRC16( unsigned char * pucFrame, uint16_t usLen )
{
unsigned char ucCRCHi = 0xFF;
unsigned char ucCRCLo = 0xFF;
int iIndex;
while( usLen-- )
{
iIndex = ucCRCLo ^ *( pucFrame++ );
ucCRCLo = ( unsigned char )( ucCRCHi ^ aucCRCHi[iIndex] );
ucCRCHi = aucCRCLo[iIndex];
}
return ( uint16_t )( ucCRCHi << 8 | ucCRCLo );
}
直接计算法:
uint16_t CRC_Compute(uint8_t *puchMsg, uint16_t usDataLen)
{
uint8_t uchCRCHi = 0xFF ;
uint8_t uchCRCLo = 0xFF ;
uint32_t uIndex ;
while (usDataLen--)
{
uIndex = uchCRCHi ^ *puchMsg++ ;
uchCRCHi = uchCRCLo ^ auchCRCHi[uIndex] ;
uchCRCLo = auchCRCLo[uIndex] ;
}
return ((uchCRCHi) <<8 | (uchCRCLo) ) ;
}
协议解析
重头戏在如何解析协议,其实也简单,可以做一个状态机,不断切换状态就可以啦...
本节我们使用的是串口中断+队列的方式,对数据进行解析,除此之外,MCU有DMA的话,强烈建议使用DMA以降低MCU负荷,后面再讲结合DMA的方式,还是使用的CUBEMX配置,配置比较简单,就直接掠过啦
先来定义一些相关的变量,基本上就是一些宏定义和结构体变量之类的,采用命令与功能回调函数绑定的方式
#define UART_RXBUFFER_SIZE 256
#define UART_FRAME_SIZE 2
/*命令码*/
#define CMD_READREG 0x01
#define CMD_WRITEDREG 0x02
#define CMD_CONFIGURE 0x03
#define CMD_IAP 0x04
/*协议相关*/
#define FRAME_LEN_POS 2//数据帧长度索引
#define FRAME_CMD_POS 3//命令码索引
#define FRAME_HEAD1 0xAA
#define FRAME_HEAD2 0x55
typedef enum {
frame_head1status = 0,
frame_head2status = 0x01,
frame_lenstatus = 0x02,
frame_datastatus = 0x03
}_E_FRAME_STATUS;
typedef struct {
uint8_t len; //数据接收长度
uint8_t rxbuffer[UART_RXBUFFER_SIZE];//数据接收缓存
}_S_UART_RX;
typedef struct{
uint8_t queue_head;//队列头
uint8_t queue_tail;//对列尾
}_S_QUEUE;
typedef struct{
uint8_t cmd;//命令
uint8_t (*callback_func)(uint8_t cmd, uint8_t *msg, uint8_t len);//命令对应的函数
}_S_FUNCCALLBACK;
在串口中断中我们这么做:
/**
* @brief This function handles USART1 global interrupt.
*/
void USART1_IRQHandler(void)
{
/* USER CODE BEGIN USART1_IRQn 0 */
#if 0
/* USER CODE END USART1_IRQn 0 */
HAL_UART_IRQHandler(&huart1);
/* USER CODE BEGIN USART1_IRQn 1 */
#else
if(__HAL_UART_GET_FLAG(&huart1,UART_FLAG_RXNE)!= RESET)
{
__HAL_UART_CLEAR_FLAG(&huart1,UART_FLAG_RXNE); //清除标志
s_uart_rx[s_queue.queue_tail].rxbuffer[(s_uart_rx[s_queue.queue_tail].len)++] = (uint8_t)(USART1->DR & (uint8_t)0x00FF);
}
#endif
/* USER CODE END USART1_IRQn 1 */
}
功能函数中我们主要封装以下几个函数,写的比较草率,核心思想是没问题的哈...
/***********************************************
*函数名称:User_UartIRQInit
*函数功能:串口中断初始化
*入口参数:CMD
*返回参数:NULL
*说明:
*作用域:内部
***********************************************/
void User_UartIRQInit(uint8_t CMD)
{
if(ENABLE==CMD)
{
__HAL_UART_ENABLE_IT(&huart1,UART_IT_RXNE);
}
if(DISABLE==CMD)
{
__HAL_UART_DISABLE_IT(&huart1,UART_IT_RXNE);
}
}
顶层设计,我们不断轮训串口任务,主要是判断队列中是否有数据:
/***********************************************
*函数名称:User_UartPoll
*函数功能:串口任务轮询
*入口参数:CMD
*返回参数:NULL
*说明:
*作用域:内部
***********************************************/
uint8_t User_UartPoll(void)
{
if(0 == s_uart_rx[s_queue.queue_head].len)
{
return 0;
}
if(s_queue.queue_head == s_queue.queue_tail)
{
if(s_queue.queue_tail>UART_RXBUFFER_SIZE-1)
{
s_queue.queue_tail = 0;
}
else
{
s_queue.queue_tail++;
}
}
for(uint8_t i = 0;i<s_uart_rx[s_queue.queue_head].len;i++)
{
User_UartDataParse(s_uart_rx[s_queue.queue_head].rxbuffer[i]);
}
s_uart_rx[s_queue.queue_head].len = 0;
if(s_queue.queue_head == s_queue.queue_tail)
{
if(s_queue.queue_head>UART_RXBUFFER_SIZE-1)
{
s_queue.queue_head = 0;
}
else
{
s_queue.queue_head++;
}
}
return 1;
}
重头戏在这个函数,里面是一个状态机,通过判断不同的数据,不断地切换当前状态:
/***********************************************
*函数名称:User_UartDataParse
*函数功能:串口数据解析
*入口参数:NULL
*返回参数:NULL
*说明:
*作用域:内部
***********************************************/
uint8_t User_UartDataParse(uint8_t data)
{
static uint8_t e_frame_status = frame_head1status;
static uint8_t frame_len = 0;
static uint8_t index = 0;
static uint8_t rx_bufftemp[256] = {0};
uint16_t crc_temp = 0;
switch (e_frame_status){
case frame_head1status: //判断数据头1
if(data == FRAME_HEAD1)
{
e_frame_status = frame_head2status;
rx_bufftemp[index] = data;
index++;
}
else
{
e_frame_status = frame_head1status;
index = 0;
memset(rx_bufftemp,0,256);
}
break;
case frame_head2status://判断数据头2
if(data == FRAME_HEAD2)
{
e_frame_status = frame_lenstatus;
rx_bufftemp[index] = data;
index++;
}
else
{
e_frame_status = frame_head1status;
index = 0;
memset(rx_bufftemp,0,256);
}
break;
case frame_lenstatus://判断数据长度
if(data>0 && data <= 255)
{
e_frame_status = frame_datastatus;
rx_bufftemp[index] = data;
index++;
}
else
{
e_frame_status = frame_head1status;
index = 0;
memset(rx_bufftemp,0,256);
}
break;
case frame_datastatus://接收数据
if(index>0 && index <= 255)
{
rx_bufftemp[index] = data;
index++;
if(index == (rx_bufftemp[FRAME_LEN_POS] + 3))//根据数据长度判断接收一帧数据是否接收完成
{
crc_temp = rx_bufftemp[index-2]+(rx_bufftemp[index-1]<<8);
if(crc_temp == CRC16(rx_bufftemp+FRAME_CMD_POS,index-5))//CRC校验相同
{
User_UartFrameParse(rx_bufftemp[FRAME_CMD_POS],rx_bufftemp,index);
e_frame_status = frame_head1status;
index = 0;
memset(rx_bufftemp,0,256);
User_UartFrameParseEnd();
}
else//不同
{
//校验值不同数据错误,执行错误逻辑,返回错误码等
}
}
}
else
{
e_frame_status = frame_head1status;
index = 0;
memset(rx_bufftemp,0,256);
}
break;
default:
e_frame_status = frame_head1status;
index = 0;
memset(rx_bufftemp,0,256);
break;
}
}
接下来是对用的功能函数,这部分主要用到了回调函数的方式,命令码与任务绑定,随便定义了4组命令,小伙伴们可以根据自己的需要,修改即可,而不用动框架:
/***********************************************
*函数名称:User_ReadRegCallback
*函数功能:
*入口参数:
*返回参数:NULL
*说明:
*作用域:内部
***********************************************/
uint8_t User_ReadRegCallback(uint8_t cmd, uint8_t *msg, uint8_t len)
{
uint8_t TestData[5] = {0x01,0x02,0x03,0x04,0x05};
User_UartFrameSend(cmd,TestData,msg,5);
}
/***********************************************
*函数名称:User_WriteRegCallback
*函数功能:
*入口参数:
*返回参数:NULL
*说明:
*作用域:内部
***********************************************/
uint8_t User_WriteRegCallback(uint8_t cmd, uint8_t *msg, uint8_t len)
{
uint8_t TestData[5] = {0x01};
User_UartFrameSend(cmd,TestData,msg,5);
}
/***********************************************
*函数名称:User_ConfigCallback
*函数功能:
*入口参数:
*返回参数:NULL
*说明:
*作用域:内部
***********************************************/
uint8_t User_ConfigCallback(uint8_t cmd, uint8_t *msg, uint8_t len)
{
uint8_t TestData[5] = {0x01,0x02,0x03};
User_UartFrameSend(cmd,TestData,msg,5);
}
/***********************************************
*函数名称:User_IAPCallback
*函数功能:
*入口参数:
*返回参数:NULL
*说明:
*作用域:内部
***********************************************/
uint8_t User_IAPCallback(uint8_t cmd, uint8_t *msg, uint8_t len)
{
uint8_t TestData[5] = {0x01,0x02,0x03,0x04};
User_UartFrameSend(cmd,TestData,msg,5);
}
_S_FUNCCALLBACK callback_list[]=
{
{ CMD_READREG,User_ReadRegCallback},
{ CMD_WRITEDREG,User_WriteRegCallback},
{ CMD_CONFIGURE,User_ConfigCallback},
{ CMD_IAP,User_IAPCallback},
};
/***********************************************
*函数名称:User_UartFrameParse
*函数功能:串口功能响应函数
*入口参数:NULL
*返回参数:NULL
*说明:
*作用域:内部
***********************************************/
void User_UartFrameParse(uint8_t cmd, uint8_t *msg, uint8_t len)
{
uint8_t cmd_indexmax = sizeof(callback_list) / sizeof(_S_FUNCCALLBACK);
uint8_t cmd_index = 0;
for (cmd_index = 0; cmd_index < cmd_indexmax; cmd_index++)
{
if (callback_list[cmd_index].cmd == cmd)
{
if(callback_list[cmd_index].callback_func != NULL)
{
callback_list[cmd_index].callback_func(cmd, msg, len);
}
}
}
}
然后是回复函数:
/***********************************************
*函数名称:User_UartFrameSend
*函数功能:串口发送数据组包
*入口参数:NULL
*返回参数:NULL
*说明:
*作用域:内部
***********************************************/
uint8_t User_UartFrameSend(uint8_t cmd,uint8_t *pdata, uint8_t *msg, uint8_t len)
{
uint8_t index = 0;
uint16_t crc_temp = 0;
msg[index++] = FRAME_HEAD1;
msg[index++] = FRAME_HEAD2;
msg[index++] = len;
msg[index++] = cmd;
for(uint8_t i = 0;i<len;i++)
{
msg[index++] = pdata[i];
}
crc_temp = CRC16(msg+FRAME_CMD_POS,index-3);
msg[index++] = crc_temp & 0x00FF;
msg[index++] = crc_temp>>8 & 0x00FF;
HAL_UART_Transmit(&huart1,msg,index,100);
return index;
}
到这里就完结了,还是比较简单的,希望能够帮到对数据解析还有些没迷茫的小伙伴
经验交流
扫码添加小飞哥好友即可,回复“进群”,进入嵌入式交流群,快来成为“人类高质量嵌入式开发者”吧



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











