







主要看cat /proc/umap/motionfusion
1、陀螺仪配置,使用在线零偏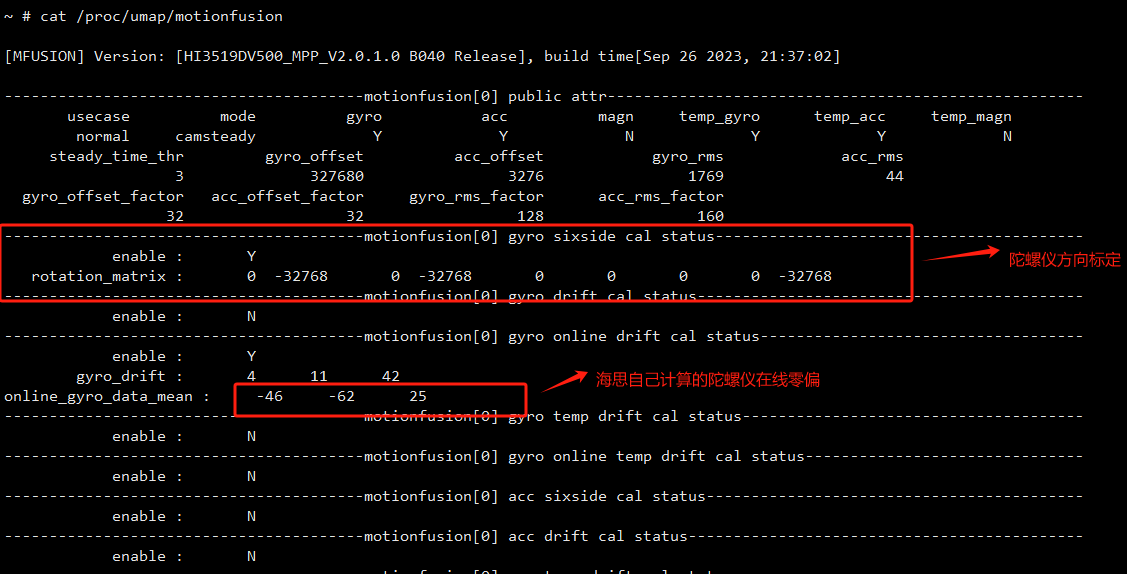
2、采集的陀螺仪数据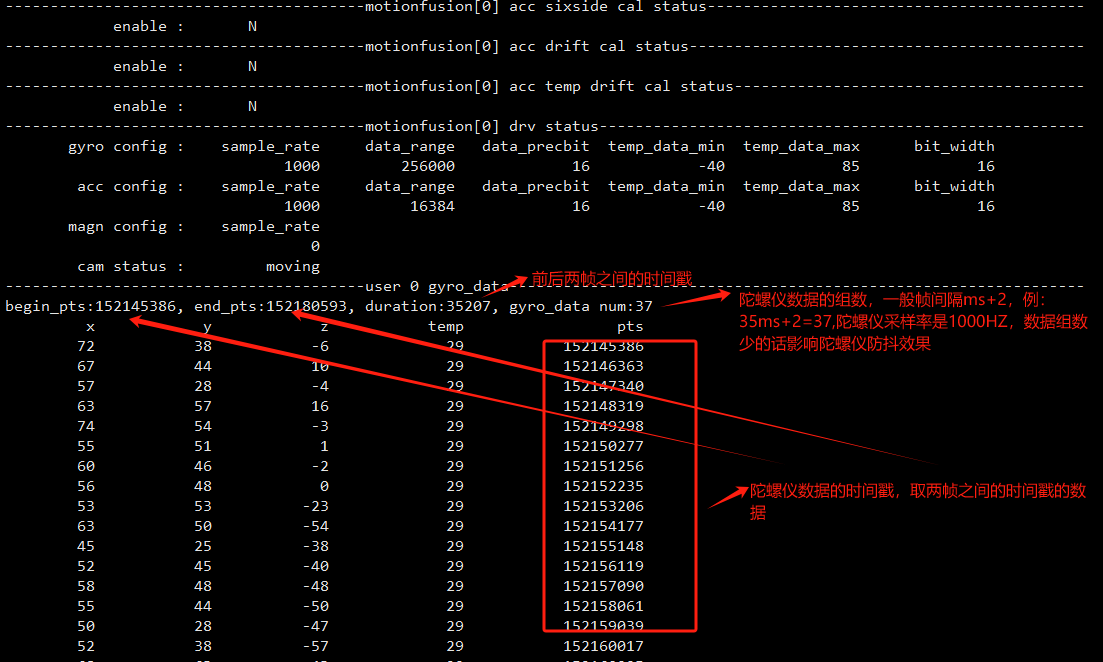
3、矫正之后的陀螺仪数据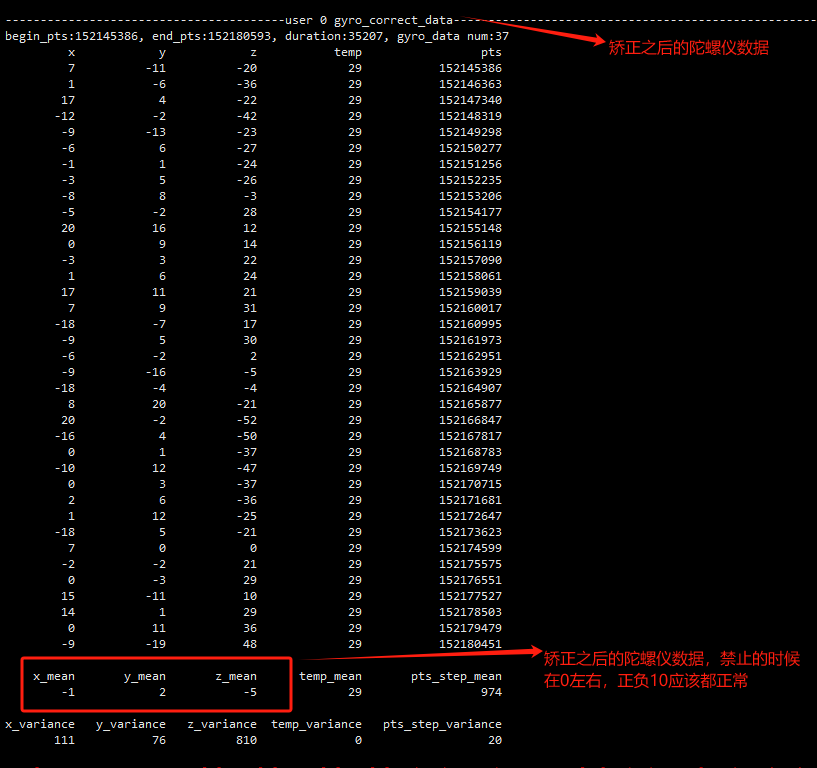
4、效果异常的情况下确认
1、镜头视场角是否异常
2、陀螺仪方向标定是否正常,正常的情况下矫正之后的数据在0上下震动
3、确认在线零偏是否正常,
4、防抖模式用的录像模式,record或者叫ipc
5、确认陀螺仪数据组数是否正常,
5.1,测试用的陀螺仪用的是 iim42652,用的fifo模式取数据,采样率为1000HZ的时候间隔时间为5ms一次,时间太长陀螺仪数据会缺失,这是针对hi3516dv500的获取数据的时候,不同的芯片不一样,根据厂家提供说明配置,测试的时候配的50ms一次,帧间隔33ms,每次智能取到一部分数据,后间隔50ms的数据还没取到
陀螺仪驱动中设置spi采集频率,间隔多久采样一次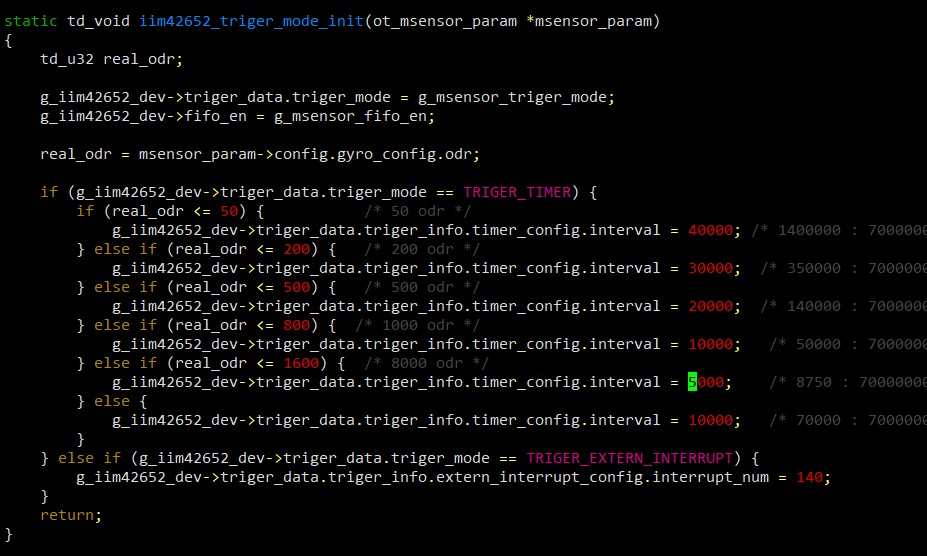 5.2 hi3516dv300在vi获取的陀螺仪数据,设置裁剪坐标之后在vpss做的裁剪
5.2 hi3516dv300在vi获取的陀螺仪数据,设置裁剪坐标之后在vpss做的裁剪
6、防抖效果尽量在曝光时间小于10ms的时候测,太小的话效果不佳
7、默认spi通信10M的通信数据,i2c的话数据低有可能数据拿到不及时
8. vi chn开低延时的时候,开陀螺仪防抖画面会来回缩放,关闭vi chn的低延时就好














 1591
1591











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









