






https://ghproxy.com/ (GitHub 文件 , Releases , archive , gist , raw.githubusercontent.com 文件代理加速下载服务)
在这个网址后面直接加上github的网址,如:
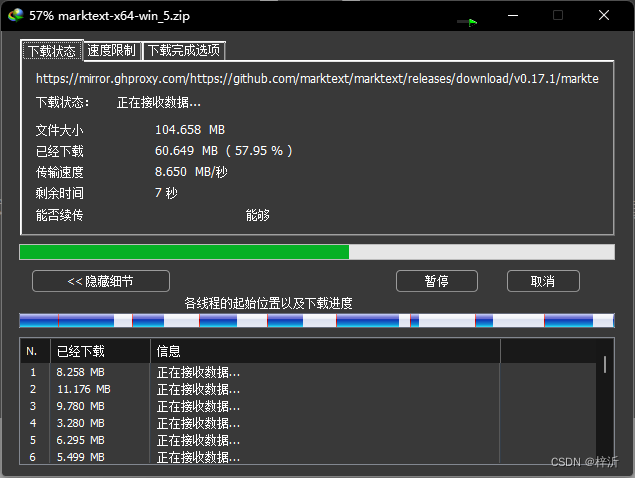
下载速度起来了,平均4~8M。
100M的文件秒传。

https://ghproxy.com/ (GitHub 文件 , Releases , archive , gist , raw.githubusercontent.com 文件代理加速下载服务)
在这个网址后面直接加上github的网址,如:
下载速度起来了,平均4~8M。
100M的文件秒传。
 9万+
8626
9万+
8626

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























