







转载 :https://blog.csdn.net/hutongling/article/details/77053920
Android的camera 从上到下分为四个部分:
Application :应用层
Framework 层
HAL 层(hardware abstract layer)
一般面向开发者的话主要集中在Application层和framework层,但是一些厂商需要定制一些属于自己特有的东西的时候会去修改HAL层集成自己的一些东西,至于Kernel层一般的开发人员不会涉及到。
下面是一个简要的camera框架图:
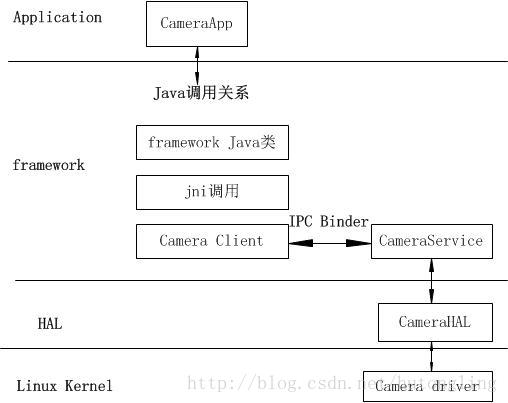
APP层通过Java调用framework层的Java类,framework层的不止包含Java类,还包含jni调用和camera client通过IPC Binder绑定获取下层的服务,然后进入HAL层。
在framework层中,Java框架通过JNI的方式调用Native框架,此处的Native作为Client端只给上层应用提供调用接口,而具体的业务实现则是由Server端(CameraService)来实现,Client和Server则是通过Binder的方式进行通讯。单独分析下Camera的C/S架构,其架构图如下
对于Android camera来说,其主要有:initialize,preview,takepicture三个关键点
由于我下载的Android源码的版本是7.1.1,版本较新,所以可能分析的内容和以前不大一样。
下面从Application层开始分析
1、camera的初始化,
Camera2的初始化流程与Camera1.0有所区别,本文将就Camera2的内置应用来分析Camera2.0的初始化过程。Camera2.0首先启动的是CameraActivity,而它继承自QuickActivity,在代码中你会发现没有重写OnCreate等生命周期方法,因为此处采用的是模板方法的设计模式,在QuickActivity中的onCreate方法调用的是onCreateTasks等方法,所以要看onCreate方法就只须看onCreateTasks方法即可
CameraActivity.java 位于package/apps/Camera2/src/com/camera/ 目录下
//CameraActivity.java
@Override
public void onCreateTasks(Bundle state) {
Profile profile = mProfiler.create("CameraActivity.onCreateTasks").start();
…
try {
//①初始化mOneCameraOpener对象和mOneCameraManager 对象
mOneCameraOpener = OneCameraModule.provideOneCameraOpener(
mFeatureConfig, mAppContext,mActiveCameraDeviceTracker,
ResolutionUtil.getDisplayMetrics(this));
mOneCameraManager = OneCameraModule.provideOneCameraManager();
} catch (OneCameraException e) {...}
…
//②设置模块信息
ModulesInfo.setupModules(mAppContext, mModuleManager, mFeatureConfig);
…
//③进行初始化
mCurrentModule.init(this, isSecureCamera(), isCaptureIntent());
…
}1234567891011121314151617181920
从上面的代码中可以看出其主要分为三个步骤:
①初始化mOneCameraOpener对象和mOneCameraManager 对象
②设置模块信息
③进行初始化
(1)、第一个步骤,初始化OneCameraOpener对象和mOneCameraManager对象,我们初始化相机就必须得打开相机,并且对打开的相机进行管理,所以这里有初始化mOneCameraOpener对象和mOneCameraManager对象,这两个对象的初始化是在OneCameraModule.java中进行的
OneCameraModule.java 位于package/apps/Camera2/src/com/camera/目录下
//OneCameraModule.java
public static OneCameraOpener provideOneCameraOpener(OneCameraFeatureConfig featureConfig,Context context,ActiveCameraDeviceTracker activeCameraDeviceTracker,DisplayMetrics displayMetrics) throws OneCameraException {
Optional<OneCameraOpener> manager = Camera2OneCameraOpenerImpl.create(
featureConfig, context, activeCameraDeviceTracker, displayMetrics);
...
return manager.get();
}
public static OneCameraManager provideOneCameraManager() throws OneCameraException {
Optional<Camera2OneCameraManagerImpl> camera2HwManager = Camera2OneCameraManagerImpl.create();
if (camera2HwManager.isPresent()) {
return camera2HwManager.get();
}
...
}1234567891011121314
它调用Camera2OneCameraOpenerImpl的create方法来获得一个OneCameraOpener对象和调用Camera2OneCameraManagerImpl的create方法来获得一个OneCameraManager对象。
//Camera2OneCameraOpenerImpl.java
public static Optional<OneCameraOpener> create(OneCameraFeatureConfig featureConfig,Context context,ActiveCameraDeviceTracker activeCameraDeviceTracker,DisplayMetrics displayMetrics) {
...
OneCameraOpener oneCameraOpener = new Camera2OneCameraOpenerImpl(featureConfig,context,cameraManager,activeCameraDeviceTracker,displayMetrics);
return Optional.of(oneCameraOpener);
}123456
//Camera2OneCameraManagerImpl.java
public static Optional<Camera2OneCameraManagerImpl> create() {
...
Camera2OneCameraManagerImpl hardwareManager =
new Camera2OneCameraManagerImpl(cameraManager);
return Optional.of(hardwareManager);
}1234567
(2)设置模块信息,即 ModulesInfo.setupModules(mAppContext, mModuleManager, mFeatureConfig);这部分内容比较重要,主要是根据配置信息,进行一系列模块的注册:
//ModulesInfo.java
public static void setupModules(Context context, ModuleManager moduleManager,OneCameraFeatureConfig config) {
...
//注册Photo模块
registerPhotoModule(moduleManager, photoModuleId, SettingsScopeNamespaces.PHOTO,config.isUsingCaptureModule());
//设置为默认的模块
moduleManager.setDefaultModuleIndex(photoModuleId);
//注册Video模块
registerVideoModule(moduleManager, res.getInteger(R.integer.camera_mode_video),SettingsScopeNamespaces.VIDEO);
if (PhotoSphereHelper.hasLightCycleCapture(context)) {//开启闪光
//注册广角镜头
registerWideAngleModule(moduleManager, res.getInteger(
R.integer.camera_mode_panorama),SettingsScopeNamespaces
.PANORAMA);
//注册光球模块
registerPhotoSphereModule(moduleManager,res.getInteger(
R.integer.camera_mode_photosphere),
SettingsScopeNamespaces.PANORAMA);
}
//若需重新聚焦
if (RefocusHelper.hasRefocusCapture(context)) {
//注册重聚焦模块
registerRefocusModule(moduleManager, res.getInteger(
R.integer.camera_mode_refocus),
SettingsScopeNamespaces.REFOCUS);
}
//如果有色分离模块
if (GcamHelper.hasGcamAsSeparateModule(config)) {
//注册色分离模块
registerGcamModule(moduleManager, res.getInteger(
R.integer.camera_mode_gcam),SettingsScopeNamespaces.PHOTO,
config.getHdrPlusSupportLevel(OneCamera.Facing.BACK));
}
int imageCaptureIntentModuleId = res.getInteger(
R.integer.camera_mode_capture_intent);
registerCaptureIntentModule(moduleManager,
imageCaptureIntentModuleId,SettingsScopeNamespaces.PHOTO,
config.isUsingCaptureModule());
}
12345678910111213141516171819202122232425262728293031323334353637383940
因为打开Camera应用,既可以拍照片也可以拍视频,此处,只分析PhotoModule的注册
private static void registerPhotoModule(ModuleManager moduleManager, final int moduleId,
final String namespace, final boolean enableCaptureModule) {
moduleManager.registerModule(new ModuleManager.ModuleAgent() {
...
public ModuleController createModule(AppController app, Intent intent) {
Log.v(TAG, "EnableCaptureModule = " + enableCaptureModule);
return enableCaptureModule ? new CaptureModule(app) : new PhotoModule(app);
}
});
}12345678910
由上面的代码可知,注册PhotoModule的关键还是在moduleManager.registerModule中的ModuleController createModule方法根据enableCaptureModule ? new CaptureModule(app) : new PhotoModule(app);来判断是进行拍照模块的注册还是Photo模块的注册。
(3)进行初始化 mCurrentModule.init();
//CaptureModule.java
public void init(CameraActivity activity, boolean isSecureCamera, boolean
isCaptureIntent) {
...
HandlerThread thread = new HandlerThread("CaptureModule.mCameraHandler");
thread.start();
mCameraHandler = new Handler(thread.getLooper());
//获取第一步中创建的OneCameraOpener 和OneCameraManager对象
mOneCameraOpener = mAppController.getCameraOpener();
...
//获取前面创建的OneCameraManager对象
mOneCameraManager = OneCameraModule.provideOneCameraManager();
`...
//新建CaptureModule的UI
mUI = new CaptureModuleUI(activity, mAppController.
getModuleLayoutRoot(), mUIListener);
//设置预览状态的监听
mAppController.setPreviewStatusListener(mPreviewStatusListener);
synchronized (mSurfaceTextureLock) {
//获取SurfaceTexture
mPreviewSurfaceTexture = mAppController.getCameraAppUI()
.getSurfaceTexture();
}
}123456789101112131415161718192021222324
先获取创建的OneCameraOpener对象以及OneCameraManager对象,然后再设置预览状态监听,这里主要分析预览状态的监听:
//CaptureModule.java
private final PreviewStatusListener mPreviewStatusListener = new
PreviewStatusListener() {
...
public void onSurfaceTextureAvailable(SurfaceTexture surface,
int width, int height) {
updatePreviewTransform(width, height, true);
synchronized (mSurfaceTextureLock) {
mPreviewSurfaceTexture = surface;
}
//打开Camera
reopenCamera();
}
public boolean onSurfaceTextureDestroyed(SurfaceTexture surface) {
Log.d(TAG, "onSurfaceTextureDestroyed");
synchronized (mSurfaceTextureLock) {
mPreviewSurfaceTexture = null;
}
//关闭Camera
closeCamera();
return true;
}
public void onSurfaceTextureSizeChanged(SurfaceTexture surface,
int width, int height) {
//更新预览尺寸
updatePreviewBufferSize();
}
...
};1234567891011121314151617181920212223242526272829
当SurfaceTexture的状态变成可用的时候,会调用reopenCamera()方法来打开Camera,分析reopenCamera()方法:
private void reopenCamera() {
if (mPaused) {
return;
}
AsyncTask.THREAD_POOL_EXECUTOR.execute(new Runnable() {
@Override
public void run() {
closeCamera();
if(!mAppController.isPaused()) {
//开启相机并预览
openCameraAndStartPreview();
}
}
});
}123456789101112131415
继续分析openCameraAndStartPreview();
//CaptureModule.java
private void openCameraAndStartPreview() {
...
if (mOneCameraOpener == null) {
...
//释放CameraOpenCloseLock锁
mCameraOpenCloseLock.release();
mAppController.getFatalErrorHandler().onGenericCameraAccessFailure();
guard.stop("No OneCameraManager");
return;
}
// Derive objects necessary for camera creation.
MainThread mainThread = MainThread.create();
//查找需要打开的CameraId
CameraId cameraId = mOneCameraManager.findFirstCameraFacing(mCameraFacing);
...
//打开Camera
mOneCameraOpener.open(cameraId, captureSetting, mCameraHandler,
mainThread, imageRotationCalculator, mBurstController,
mSoundPlayer,new OpenCallback() {
public void onFailure() {
//进行失败的处理
...
}
@Override
public void onCameraClosed() {
...
}
@Override
public void onCameraOpened(@Nonnull final OneCamera camera) {
Log.d(TAG, "onCameraOpened: " + camera);
mCamera = camera;
if (mAppController.isPaused()) {
onFailure();
return;
}
...
mMainThread.execute(new Runnable() {
@Override
public void run() {
//通知UI,Camera状态变化
mAppController.getCameraAppUI().onChangeCamera();
//使能拍照按钮
mAppController.getButtonManager().enableCameraButton();
}
});
//至此,Camera打开成功,开始预览
camera.startPreview(new Surface(getPreviewSurfaceTexture()),
new CaptureReadyCallback() {
@Override
public void onSetupFailed() {
...
}
@Override
public void onReadyForCapture() {
//释放锁
mCameraOpenCloseLock.release();
mMainThread.execute(new Runnable() {
@Override
public void run() {
...
onPreviewStarted();
...
onReadyStateChanged(true);
//设置CaptureModule为Capture准备的状态监听
mCamera.setReadyStateChangedListener(
CaptureModule.this);
mUI.initializeZoom(mCamera.getMaxZoom());
mCamera.setFocusStateListener(
CaptureModule.this);
}
});
}
});
}
}, mAppController.getFatalErrorHandler());
guard.stop("mOneCameraOpener.open()");
}
}1234567891011121314151617181920212223242526272829303132333435363738394041424344454647484950515253545556575859606162636465666768697071727374757677787980818283
这里主要会调用Camera2OneCameraOpenerImpl的open方法来打开Camera,并定义了开启的回调函数,对开启结束后的结果进行处理,如失败则释放mCameraOpenCloseLock,并暂停mAppController,如果打开成功,通知UI成功,并开启Camera的Preview(在回调new OpenCallback中打开预览函数camera.startPreview()),并且定义了Preview的各种回调操作(如new CaptureReadyCallback()中的是否设置失败onSetupFailed,是否准备好拍照onReadyForCapture),针对Open过程,所以继续分析:
//Camera2OneCameraOpenerImpl.java
public void open(
...
mActiveCameraDeviceTracker.onCameraOpening(cameraKey);
//打开Camera,此处调用framework层的CameraManager类的openCamera,进入frameworks层
mCameraManager.openCamera(cameraKey.getValue(),
new CameraDevice.StateCallback() {
private boolean isFirstCallback = true;
...
public void onOpened(CameraDevice device) {
//第一次调用此回调
if (isFirstCallback) {
isFirstCallback = false;
try {
CameraCharacteristics characteristics = mCameraManager
.getCameraCharacteristics(device.getId());
...
//创建OneCamera对象
OneCamera oneCamera = OneCameraCreator.create(device,
characteristics, mFeatureConfig, captureSetting,
mDisplayMetrics, mContext, mainThread,
imageRotationCalculator, burstController, soundPlayer,
fatalErrorHandler);
if (oneCamera != null) {
//如果oneCamera不为空,则回调onCameraOpened,后面将做分析
openCallback.onCameraOpened(oneCamera);
} else {
...
openCallback.onFailure();
}
} catch (CameraAccessException e) {
openCallback.onFailure();
} catch (OneCameraAccessException e) {
Log.d(TAG, "Could not create OneCamera", e);
openCallback.onFailure();
}
}
}
}, handler);
...
}12345678910111213141516171819202122232425262728293031323334353637383940414243
接着调用CameraManager的openCamera方法打开相机,进入到framework层进行初始化
(CameraManager是连接App层和framework层的桥梁)
下面是App层初始化的时序图:
2、framework层的初始化
通过上面的CameraManager的openCamera进入到framework层,下面我们看openCamera方法:
//CameraManager.java
public void openCamera(@NonNull String cameraId,
@NonNull final CameraDevice.StateCallback callback, @Nullable Handler handler)
throws CameraAccessException {
openCameraForUid(cameraId, callback, handler, USE_CALLING_UID);
}1234567
openCamera方法调用了openCameraForUid方法,
//CameraManager.java
public void openCameraForUid(@NonNull String cameraId,
@NonNull final CameraDevice.StateCallback callback, @Nullable Handler handler,
int clientUid)
throws CameraAccessException {
...
openCameraDeviceUserAsync(cameraId, callback, handler, clientUid);
}
12345678910
接着调用了openCameraDeviceUserAsync方法:
private CameraDevice openCameraDeviceUserAsync(String cameraId,
CameraDevice.StateCallback callback, Handler handler, final int uid)
throws CameraAccessException {
CameraCharacteristics characteristics = getCameraCharacteristics(cameraId);
CameraDevice device = null;
synchronized (mLock) {
ICameraDeviceUser cameraUser = null;
android.hardware.camera2.impl.CameraDeviceImpl deviceImpl =
new android.hardware.camera2.impl.CameraDeviceImpl(
cameraId,
callback,
handler,
characteristics);
ICameraDeviceCallbacks callbacks = deviceImpl.getCallbacks();
...
try {
if (supportsCamera2ApiLocked(cameraId)) {
ICameraService cameraService = CameraManagerGlobal.get().getCameraService();
...
cameraUser = cameraService.connectDevice(callbacks, id,
mContext.getOpPackageName(), uid);
} else {
// Use legacy camera implementation for HAL1 devices
Log.i(TAG, "Using legacy camera HAL.");
cameraUser = CameraDeviceUserShim.connectBinderShim(callbacks, id);
}
} catch (ServiceSpecificException e) {
...
} catch (RemoteException e) {
...
}
...
deviceImpl.setRemoteDevice(cameraUser);
device = deviceImpl;
}
return device;
}
12345678910111213141516171819202122232425262728293031323334353637383940
该方法最重要的功能就是通过Java的Binder绑定功能获取CameraService,然后通过CameraService连接到具体的设备cameraUser = cameraService.connectDevice(callbacks, id, mContext.getOpPackageName(), uid);
//CameraService.cpp
Status CameraService::connectDevice(
const sp<hardware::camera2::ICameraDeviceCallbacks>& cameraCb,
int cameraId,
const String16& clientPackageName,
int clientUid,
/*out*/
sp<hardware::camera2::ICameraDeviceUser>* device) {
ATRACE_CALL();
Status ret = Status::ok();
String8 id = String8::format("%d", cameraId);
sp<CameraDeviceClient> client = nullptr;
ret = connectHelper<hardware::camera2::ICameraDeviceCallbacks,CameraDeviceClient>(cameraCb, id,
CAMERA_HAL_API_VERSION_UNSPECIFIED, clientPackageName,
clientUid, USE_CALLING_PID, API_2,
/*legacyMode*/ false, /*shimUpdateOnly*/ false,
/*out*/client);
if(!ret.isOk()) {
logRejected(id, getCallingPid(), String8(clientPackageName),
ret.toString8());
return ret;
}
*device = client;
return ret;
}12345678910111213141516171819202122232425262728
调用connectHelper
//CameraService.h
binder::Status CameraService::connectHelper(const sp<CALLBACK>& cameraCb, const String8& cameraId,
int halVersion, const String16& clientPackageName, int clientUid, int clientPid,
apiLevel effectiveApiLevel, bool legacyMode, bool shimUpdateOnly,
/*out*/sp<CLIENT>& device) {
binder::Status ret = binder::Status::ok();
String8 clientName8(clientPackageName);
int originalClientPid = 0;
ALOGI("CameraService::connect call (PID %d \"%s\", camera ID %s) for HAL version %s and "
"Camera API version %d", clientPid, clientName8.string(), cameraId.string(),
(halVersion == -1) ? "default" : std::to_string(halVersion).c_str(),
static_cast<int>(effectiveApiLevel));
sp<CLIENT> client = nullptr;
{
// Acquire mServiceLock and prevent other clients from connecting
std::unique_ptr<AutoConditionLock> lock =
AutoConditionLock::waitAndAcquire(mServiceLockWrapper, DEFAULT_CONNECT_TIMEOUT_NS);
if (lock == nullptr) {
ALOGE("CameraService::connect (PID %d) rejected (too many other clients connecting)."
, clientPid);
return STATUS_ERROR_FMT(ERROR_MAX_CAMERAS_IN_USE,
"Cannot open camera %s for \"%s\" (PID %d): Too many other clients connecting",
cameraId.string(), clientName8.string(), clientPid);
}
// Enforce client permissions and do basic sanity checks
if(!(ret = validateConnectLocked(cameraId, clientName8,
/*inout*/clientUid, /*inout*/clientPid, /*out*/originalClientPid)).isOk()) {
return ret;
}
// Check the shim parameters after acquiring lock, if they have already been updated and
// we were doing a shim update, return immediately
if (shimUpdateOnly) {
auto cameraState = getCameraState(cameraId);
if (cameraState != nullptr) {
if (!cameraState->getShimParams().isEmpty()) return ret;
}
}
status_t err;
sp<BasicClient> clientTmp = nullptr;
std::shared_ptr<resource_policy::ClientDescriptor<String8, sp<BasicClient>>> partial;
if ((err = handleEvictionsLocked(cameraId, originalClientPid, effectiveApiLevel,
IInterface::asBinder(cameraCb), clientName8, /*out*/&clientTmp,
/*out*/&partial)) != NO_ERROR) {
switch (err) {
case -ENODEV:
return STATUS_ERROR_FMT(ERROR_DISCONNECTED,
"No camera device with ID \"%s\" currently available",
cameraId.string());
case -EBUSY:
return STATUS_ERROR_FMT(ERROR_CAMERA_IN_USE,
"Higher-priority client using camera, ID \"%s\" currently unavailable",
cameraId.string());
default:
return STATUS_ERROR_FMT(ERROR_INVALID_OPERATION,
"Unexpected error %s (%d) opening camera \"%s\"",
strerror(-err), err, cameraId.string());
}
}
if (clientTmp.get() != nullptr) {
// Handle special case for API1 MediaRecorder where the existing client is returned
device = static_cast<CLIENT*>(clientTmp.get());
return ret;
}
// give flashlight a chance to close devices if necessary.
mFlashlight->prepareDeviceOpen(cameraId);
// TODO: Update getDeviceVersion + HAL interface to use strings for Camera IDs
int id = cameraIdToInt(cameraId);
if (id == -1) {
ALOGE("%s: Invalid camera ID %s, cannot get device version from HAL.", __FUNCTION__,
cameraId.string());
return STATUS_ERROR_FMT(ERROR_ILLEGAL_ARGUMENT,
"Bad camera ID \"%s\" passed to camera open", cameraId.string());
}
int facing = -1;
int deviceVersion = getDeviceVersion(id, /*out*/&facing);
sp<BasicClient> tmp = nullptr;
if(!(ret = makeClient(this, cameraCb, clientPackageName, id, facing, clientPid,
clientUid, getpid(), legacyMode, halVersion, deviceVersion, effectiveApiLevel,
/*out*/&tmp)).isOk()) {
return ret;
}
client = static_cast<CLIENT*>(tmp.get());
LOG_ALWAYS_FATAL_IF(client.get() == nullptr, "%s: CameraService in invalid state",
__FUNCTION__);
if ((err = client->initialize(mModule)) != OK) {
ALOGE("%s: Could not initialize client from HAL module.", __FUNCTION__);
// Errors could be from the HAL module open call or from AppOpsManager
switch(err) {
case BAD_VALUE:
return STATUS_ERROR_FMT(ERROR_ILLEGAL_ARGUMENT,
"Illegal argument to HAL module for camera \"%s\"", cameraId.string());
case -EBUSY:
return STATUS_ERROR_FMT(ERROR_CAMERA_IN_USE,
"Camera \"%s\" is already open", cameraId.string());
case -EUSERS:
return STATUS_ERROR_FMT(ERROR_MAX_CAMERAS_IN_USE,
"Too many cameras already open, cannot open camera \"%s\"",
cameraId.string());
case PERMISSION_DENIED:
return STATUS_ERROR_FMT(ERROR_PERMISSION_DENIED,
"No permission to open camera \"%s\"", cameraId.string());
case -EACCES:
return STATUS_ERROR_FMT(ERROR_DISABLED,
"Camera \"%s\" disabled by policy", cameraId.string());
case -ENODEV:
default:
return STATUS_ERROR_FMT(ERROR_INVALID_OPERATION,
"Failed to initialize camera \"%s\": %s (%d)", cameraId.string(),
strerror(-err), err);
}
}
// Update shim paremeters for legacy clients
if (effectiveApiLevel == API_1) {
// Assume we have always received a Client subclass for API1
sp<Client> shimClient = reinterpret_cast<Client*>(client.get());
String8 rawParams = shimClient->getParameters();
CameraParameters params(rawParams);
auto cameraState = getCameraState(cameraId);
if (cameraState != nullptr) {
cameraState->setShimParams(params);
} else {
ALOGE("%s: Cannot update shim parameters for camera %s, no such device exists.",
__FUNCTION__, cameraId.string());
}
}
if (shimUpdateOnly) {
// If only updating legacy shim parameters, immediately disconnect client
mServiceLock.unlock();
client->disconnect();
mServiceLock.lock();
} else {
// Otherwise, add client to active clients list
finishConnectLocked(client, partial);
}
} // lock is destroyed, allow further connect calls
// Important: release the mutex here so the client can call back into the service from its
// destructor (can be at the end of the call)
device = client;
return ret;
}
123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960616263646566676869707172737475767778798081828384858687888990919293949596979899100101102103104105106107108109110111112113114115116117118119120121122123124125126127128129130131132133134135136137138139140141142143144145146147148149150151152153154155156157158159160
调用makeClient
//CameraService.cpp
Status CameraService::makeClient(const sp<CameraService>& cameraService,
const sp<IInterface>& cameraCb, const String16& packageName, int cameraId,
int facing, int clientPid, uid_t clientUid, int servicePid, bool legacyMode,
int halVersion, int deviceVersion, apiLevel effectiveApiLevel,
/*out*/sp<BasicClient>* client) {
if (halVersion < 0 || halVersion == deviceVersion) {
// Default path: HAL version is unspecified by caller, create CameraClient
// based on device version reported by the HAL.
switch(deviceVersion) {
case CAMERA_DEVICE_API_VERSION_1_0:
if (effectiveApiLevel == API_1) { // Camera1 API route
sp<ICameraClient> tmp = static_cast<ICameraClient*>(cameraCb.get());
*client = new CameraClient(cameraService, tmp, packageName, cameraId, facing,
clientPid, clientUid, getpid(), legacyMode);
} else { // Camera2 API route
ALOGW("Camera using old HAL version: %d", deviceVersion);
return STATUS_ERROR_FMT(ERROR_DEPRECATED_HAL,
"Camera device \"%d\" HAL version %d does not support camera2 API",
cameraId, deviceVersion);
}
break;
case CAMERA_DEVICE_API_VERSION_3_0:
case CAMERA_DEVICE_API_VERSION_3_1:
case CAMERA_DEVICE_API_VERSION_3_2:
case CAMERA_DEVICE_API_VERSION_3_3:
case CAMERA_DEVICE_API_VERSION_3_4:
if (effectiveApiLevel == API_1) { // Camera1 API route
sp<ICameraClient> tmp = static_cast<ICameraClient*>(cameraCb.get());
*client = new Camera2Client(cameraService, tmp, packageName, cameraId, facing,
clientPid, clientUid, servicePid, legacyMode);
} else { // Camera2 API route
sp<hardware::camera2::ICameraDeviceCallbacks> tmp =
static_cast<hardware::camera2::ICameraDeviceCallbacks*>(cameraCb.get());
*client = new CameraDeviceClient(cameraService, tmp, packageName, cameraId,
facing, clientPid, clientUid, servicePid);
}
break;
default:
// Should not be reachable
ALOGE("Unknown camera device HAL version: %d", deviceVersion);
return STATUS_ERROR_FMT(ERROR_INVALID_OPERATION,
"Camera device \"%d\" has unknown HAL version %d",
cameraId, deviceVersion);
}
} else {
// A particular HAL version is requested by caller. Create CameraClient
// based on the requested HAL version.
if (deviceVersion > CAMERA_DEVICE_API_VERSION_1_0 &&
halVersion == CAMERA_DEVICE_API_VERSION_1_0) {
// Only support higher HAL version device opened as HAL1.0 device.
sp<ICameraClient> tmp = static_cast<ICameraClient*>(cameraCb.get());
*client = new CameraClient(cameraService, tmp, packageName, cameraId, facing,
clientPid, clientUid, servicePid, legacyMode);
} else {
// Other combinations (e.g. HAL3.x open as HAL2.x) are not supported yet.
ALOGE("Invalid camera HAL version %x: HAL %x device can only be"
" opened as HAL %x device", halVersion, deviceVersion,
CAMERA_DEVICE_API_VERSION_1_0);
return STATUS_ERROR_FMT(ERROR_ILLEGAL_ARGUMENT,
"Camera device \"%d\" (HAL version %d) cannot be opened as HAL version %d",
cameraId, deviceVersion, halVersion);
}
}
return Status::ok();
}12345678910111213141516171819202122232425262728293031323334353637383940414243444546474849505152535455565758596061626364656667
因为使用的Camera API 2.0,所以创建client=new CameraDeviceClient();
创建之后需要调用CameraDeviceClient的Initialize方法进行初始化(下面讲)
//CameraDeviceClient.cpp
CameraDeviceClient::CameraDeviceClient(const sp<CameraService>& cameraService,
const sp<hardware::camera2::ICameraDeviceCallbacks>& remoteCallback,
const String16& clientPackageName,
int cameraId,
int cameraFacing,
int clientPid,
uid_t clientUid,
int servicePid) :
Camera2ClientBase(cameraService, remoteCallback, clientPackageName,
cameraId, cameraFacing, clientPid, clientUid, servicePid),
mInputStream(),
mStreamingRequestId(REQUEST_ID_NONE),
mRequestIdCounter(0) {
ATRACE_CALL();
ALOGI("CameraDeviceClient %d: Opened", cameraId);
}
12345678910111213141516171819
继续调用Camera2ClientBase;并进行初始化
template <typename TClientBase>
Camera2ClientBase<TClientBase>::Camera2ClientBase(
const sp<CameraService>& cameraService,
const sp<TCamCallbacks>& remoteCallback,
const String16& clientPackageName,
int cameraId,
int cameraFacing,
int clientPid,
uid_t clientUid,
int servicePid):
TClientBase(cameraService, remoteCallback, clientPackageName,
cameraId, cameraFacing, clientPid, clientUid, servicePid),
mSharedCameraCallbacks(remoteCallback),
mDeviceVersion(cameraService->getDeviceVersion(cameraId)),
mDeviceActive(false)
{
ALOGI("Camera %d: Opened. Client: %s (PID %d, UID %d)", cameraId,
String8(clientPackageName).string(), clientPid, clientUid);
mInitialClientPid = clientPid;
mDevice = new Camera3Device(cameraId);
LOG_ALWAYS_FATAL_IF(mDevice == 0, "Device should never be NULL here.");
}1234567891011121314151617181920212223
创建mDevice=new Camera3Device();
Camera3Device::Camera3Device(int id):
mId(id),
mIsConstrainedHighSpeedConfiguration(false),
mHal3Device(NULL),
mStatus(STATUS_UNINITIALIZED),
mStatusWaiters(0),
mUsePartialResult(false),
mNumPartialResults(1),
mTimestampOffset(0),
mNextResultFrameNumber(0),
mNextReprocessResultFrameNumber(0),
mNextShutterFrameNumber(0),
mNextReprocessShutterFrameNumber(0),
mListener(NULL)
{
ATRACE_CALL();
camera3_callback_ops::notify = &sNotify;
camera3_callback_ops::process_capture_result = &sProcessCaptureResult;
ALOGV("%s: Created device for camera %d", __FUNCTION__, id);
}1234567891011121314151617181920
CameraDeviceClient创建对象之后需要调用initialize进行初始化:
status_t CameraDeviceClient::initialize(CameraModule *module)
{
ATRACE_CALL();
status_t res;
res = Camera2ClientBase::initialize(module);
if (res != OK) {
return res;
}
String8 threadName;
mFrameProcessor = new FrameProcessorBase(mDevice);
threadName = String8::format("CDU-%d-FrameProc", mCameraId);
mFrameProcessor->run(threadName.string());
mFrameProcessor->registerListener(FRAME_PROCESSOR_LISTENER_MIN_ID,
FRAME_PROCESSOR_LISTENER_MAX_ID,
/*listener*/this,
/*sendPartials*/true);
return OK;
}12345678910111213141516171819202122
这个初始化又调用了Camera2ClientBase的initialize(module);
template <typename TClientBase>
status_t Camera2ClientBase<TClientBase>::initialize(CameraModule *module) {
ATRACE_CALL();
ALOGV("%s: Initializing client for camera %d", __FUNCTION__,
TClientBase::mCameraId);
status_t res;
// Verify ops permissions
res = TClientBase::startCameraOps();
if (res != OK) {
return res;
}
if (mDevice == NULL) {
ALOGE("%s: Camera %d: No device connected",
__FUNCTION__, TClientBase::mCameraId);
return NO_INIT;
}
res = mDevice->initialize(module);
if (res != OK) {
ALOGE("%s: Camera %d: unable to initialize device: %s (%d)",
__FUNCTION__, TClientBase::mCameraId, strerror(-res), res);
return res;
}
wp<CameraDeviceBase::NotificationListener> weakThis(this);
res = mDevice->setNotifyCallback(weakThis);
return OK;
}12345678910111213141516171819202122232425262728293031
在Camera2ClientBase的初始化过程中又调用了Camera3Device的Initialize进行初始化
status_t Camera3Device::initialize(CameraModule *module)
{
ATRACE_CALL();
Mutex::Autolock il(mInterfaceLock);
Mutex::Autolock l(mLock);
ALOGV("%s: Initializing device for camera %d", __FUNCTION__, mId);
if (mStatus != STATUS_UNINITIALIZED) {
CLOGE("Already initialized!");
return INVALID_OPERATION;
}
/** Open HAL device */
status_t res;
String8 deviceName = String8::format("%d", mId);
camera3_device_t *device;
ATRACE_BEGIN("camera3->open");
res = module->open(deviceName.string(),
reinterpret_cast<hw_device_t**>(&device));
ATRACE_END();
if (res != OK) {
SET_ERR_L("Could not open camera: %s (%d)", strerror(-res), res);
return res;
}
/** Cross-check device version */
if (device->common.version < CAMERA_DEVICE_API_VERSION_3_0) {
SET_ERR_L("Could not open camera: "
"Camera device should be at least %x, reports %x instead",
CAMERA_DEVICE_API_VERSION_3_0,
device->common.version);
device->common.close(&device->common);
return BAD_VALUE;
}
camera_info info;
res = module->getCameraInfo(mId, &info);
if (res != OK) return res;
if (info.device_version != device->common.version) {
SET_ERR_L("HAL reporting mismatched camera_info version (%x)"
" and device version (%x).",
info.device_version, device->common.version);
device->common.close(&device->common);
return BAD_VALUE;
}
/** Initialize device with callback functions */
ATRACE_BEGIN("camera3->initialize");
res = device->ops->initialize(device, this);
ATRACE_END();
if (res != OK) {
SET_ERR_L("Unable to initialize HAL device: %s (%d)",
strerror(-res), res);
device->common.close(&device->common);
return BAD_VALUE;
}
/** Start up status tracker thread */
mStatusTracker = new StatusTracker(this);
res = mStatusTracker->run(String8::format("C3Dev-%d-Status", mId).string());
if (res != OK) {
SET_ERR_L("Unable to start status tracking thread: %s (%d)",
strerror(-res), res);
device->common.close(&device->common);
mStatusTracker.clear();
return res;
}
/** Register in-flight map to the status tracker */
mInFlightStatusId = mStatusTracker->addComponent();
/** Create buffer manager */
mBufferManager = new Camera3BufferManager();
bool aeLockAvailable = false;
camera_metadata_ro_entry aeLockAvailableEntry;
res = find_camera_metadata_ro_entry(info.static_camera_characteristics,
ANDROID_CONTROL_AE_LOCK_AVAILABLE, &aeLockAvailableEntry);
if (res == OK && aeLockAvailableEntry.count > 0) {
aeLockAvailable = (aeLockAvailableEntry.data.u8[0] ==
ANDROID_CONTROL_AE_LOCK_AVAILABLE_TRUE);
}
/** Start up request queue thread */
mRequestThread = new RequestThread(this, mStatusTracker, device, aeLockAvailable);
res = mRequestThread->run(String8::format("C3Dev-%d-ReqQueue", mId).string());
if (res != OK) {
SET_ERR_L("Unable to start request queue thread: %s (%d)",
strerror(-res), res);
device->common.close(&device->common);
mRequestThread.clear();
return res;
}
mPreparerThread = new PreparerThread();
/** Everything is good to go */
mDeviceVersion = device->common.version;
mDeviceInfo = info.static_camera_characteristics;
mHal3Device = device;
// Determine whether we need to derive sensitivity boost values for older devices.
// If post-RAW sensitivity boost range is listed, so should post-raw sensitivity control
// be listed (as the default value 100)
if (mDeviceVersion < CAMERA_DEVICE_API_VERSION_3_4 &&
mDeviceInfo.exists(ANDROID_CONTROL_POST_RAW_SENSITIVITY_BOOST_RANGE)) {
mDerivePostRawSensKey = true;
}
internalUpdateStatusLocked(STATUS_UNCONFIGURED);
mNextStreamId = 0;
mDummyStreamId = NO_STREAM;
mNeedConfig = true;
mPauseStateNotify = false;
// Measure the clock domain offset between camera and video/hw_composer
camera_metadata_entry timestampSource =
mDeviceInfo.find(ANDROID_SENSOR_INFO_TIMESTAMP_SOURCE);
if (timestampSource.count > 0 && timestampSource.data.u8[0] ==
ANDROID_SENSOR_INFO_TIMESTAMP_SOURCE_REALTIME) {
mTimestampOffset = getMonoToBoottimeOffset();
}
// Will the HAL be sending in early partial result metadata?
if (mDeviceVersion >= CAMERA_DEVICE_API_VERSION_3_2) {
camera_metadata_entry partialResultsCount =
mDeviceInfo.find(ANDROID_REQUEST_PARTIAL_RESULT_COUNT);
if (partialResultsCount.count > 0) {
mNumPartialResults = partialResultsCount.data.i32[0];
mUsePartialResult = (mNumPartialResults > 1);
}
} else {
camera_metadata_entry partialResultsQuirk =
mDeviceInfo.find(ANDROID_QUIRKS_USE_PARTIAL_RESULT);
if (partialResultsQuirk.count > 0 && partialResultsQuirk.data.u8[0] == 1) {
mUsePartialResult = true;
}
}
camera_metadata_entry configs =
mDeviceInfo.find(ANDROID_SCALER_AVAILABLE_STREAM_CONFIGURATIONS);
for (uint32_t i = 0; i < configs.count; i += 4) {
if (configs.data.i32[i] == HAL_PIXEL_FORMAT_IMPLEMENTATION_DEFINED &&
configs.data.i32[i + 3] ==
ANDROID_SCALER_AVAILABLE_STREAM_CONFIGURATIONS_INPUT) {
mSupportedOpaqueInputSizes.add(Size(configs.data.i32[i + 1],
configs.data.i32[i + 2]));
}
}
return OK;
}
123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960616263646566676869707172737475767778798081828384858687888990919293949596979899100101102103104105106107108109110111112113114115116117118119120121122123124125126127128129130131132133134135136137138139140141142143144145146147148149150151152153154155156157158159160161
在Camera3Device的初始化中又三个重要的步骤:
第一个:module.open(),打开模块;
第二个:device.ops.initialize()进行HAL层的初始化;
第三个:mRequestThread.run();启动请求线程
至此,framework层的初始化已经完成了,接下来就是HAL层的初始化。
framework层初始化的时序图:
3、HAL层的初始化
由Camera3Device.cpp中的initialize中的device.ops.initialize调用进入到HAL层的初始化
//QCamera3HardwareInterface.cpp
int QCamera3HardwareInterface::initialize(const struct camera3_device *device,
const camera3_callback_ops_t *callback_ops)
{
LOGD("E");
QCamera3HardwareInterface *hw =
reinterpret_cast<QCamera3HardwareInterface *>(device->priv);
if (!hw) {
LOGE("NULL camera device");
return -ENODEV;
}
int rc = hw->initialize(callback_ops);
LOGD("X");
return rc;
}12345678910111213141516
其中调用QCamera3HardwareInterface的initialize(callback_ops),
//QCamera3HardwareInterface.cpp
int QCamera3HardwareInterface::initialize(
const struct camera3_callback_ops *callback_ops)
{
ATRACE_CALL();
int rc;
LOGI("E :mCameraId = %d mState = %d", mCameraId, mState);
pthread_mutex_lock(&mMutex);
// Validate current state
switch (mState) {
case OPENED:
/* valid state */
break;
default:
LOGE("Invalid state %d", mState);
rc = -ENODEV;
goto err1;
}
rc = initParameters();
if (rc < 0) {
LOGE("initParamters failed %d", rc);
goto err1;
}
mCallbackOps = callback_ops;
mChannelHandle = mCameraHandle->ops->add_channel(
mCameraHandle->camera_handle, NULL, NULL, this);
if (mChannelHandle == 0) {
LOGE("add_channel failed");
rc = -ENOMEM;
pthread_mutex_unlock(&mMutex);
return rc;
}
pthread_mutex_unlock(&mMutex);
mCameraInitialized = true;
mState = INITIALIZED;
LOGI("X");
return 0;
err1:
pthread_mutex_unlock(&mMutex);
return rc;
}1234567891011121314151617181920212223242526272829303132333435363738394041424344454647
其中有比较重要的两个步骤:
第一个:initParameters();进行参数的初始化;
第二个:调用mm_camera_intf的add_channel方法;
先看第一个:
int QCamera3HardwareInterface::initParameters()
{
int rc = 0;
//Allocate Set Param Buffer
mParamHeap = new QCamera3HeapMemory(1);
rc = mParamHeap->allocate(sizeof(metadata_buffer_t));
if(rc != OK) {
rc = NO_MEMORY;
LOGE("Failed to allocate SETPARM Heap memory");
delete mParamHeap;
mParamHeap = NULL;
return rc;
}
//Map memory for parameters buffer
rc = mCameraHandle->ops->map_buf(mCameraHandle->camera_handle,
CAM_MAPPING_BUF_TYPE_PARM_BUF,
mParamHeap->getFd(0),
sizeof(metadata_buffer_t),
(metadata_buffer_t *) DATA_PTR(mParamHeap,0));
if(rc < 0) {
LOGE("failed to map SETPARM buffer");
rc = FAILED_TRANSACTION;
mParamHeap->deallocate();
delete mParamHeap;
mParamHeap = NULL;
return rc;
}
mParameters = (metadata_buffer_t *) DATA_PTR(mParamHeap,0);
mPrevParameters = (metadata_buffer_t *)malloc(sizeof(metadata_buffer_t));
return rc;
}
123456789101112131415161718192021222324252627282930313233
使用QCamera3HeapMemory创建了mParamHeap, QCamera3HeapMemory位于QCamera3Mem.cpp中,是一个子类,其参数表示帧数,可以在此控制放入的帧数。
//QCamera3Mem.cpp
QCamera3HeapMemory::QCamera3HeapMemory(uint32_t maxCnt)
: QCamera3Memory()
{
mMaxCnt = MIN(maxCnt, MM_CAMERA_MAX_NUM_FRAMES);
for (uint32_t i = 0; i < mMaxCnt; i ++)
mPtr[i] = NULL;
}12345678
然后就是讲参数buffer与内存map进行映射;
rc = mCameraHandle->ops->map_buf(mCameraHandle->camera_handle,
CAM_MAPPING_BUF_TYPE_PARM_BUF,
mParamHeap->getFd(0),
sizeof(metadata_buffer_t),
(metadata_buffer_t *) DATA_PTR(mParamHeap,0));12345
并且将mParamHeap的头指针指向mParameters,这样通过mParameters就可以控制参数了。
接下来就是看第二个:调用mm_camera_intf.c的add_channel方法;
先在mm_camera_interface.c中找到mm_camera_ops,然后找到add_channel的映射方法mm_camera_intf_add_channel,并进入该方法:
//mm_camera_interface.c
static uint32_t mm_camera_intf_add_channel(uint32_t camera_handle,
mm_camera_channel_attr_t *attr,
mm_camera_buf_notify_t channel_cb,
void *userdata)
{
uint32_t ch_id = 0;
mm_camera_obj_t * my_obj = NULL;
CDBG("%s :E camera_handler = %d", __func__, camera_handle);
pthread_mutex_lock(&g_intf_lock);
my_obj = mm_camera_util_get_camera_by_handler(camera_handle);
if(my_obj) {
pthread_mutex_lock(&my_obj->cam_lock);
pthread_mutex_unlock(&g_intf_lock);
ch_id = mm_camera_add_channel(my_obj, attr, channel_cb, userdata);
} else {
pthread_mutex_unlock(&g_intf_lock);
}
CDBG("%s :X ch_id = %d", __func__, ch_id);
return ch_id;
}1234567891011121314151617181920212223
该方法中又调用mm_camerea.c的add_channel方法mm_camera_add_channel,进如mm_camera.c的add_channel方法中
//mm_camera.c
uint32_t mm_camera_add_channel(mm_camera_obj_t *my_obj,
mm_camera_channel_attr_t *attr,
mm_camera_buf_notify_t channel_cb,
void *userdata)
{
mm_channel_t *ch_obj = NULL;
uint8_t ch_idx = 0;
uint32_t ch_hdl = 0;
for(ch_idx = 0; ch_idx < MM_CAMERA_CHANNEL_MAX; ch_idx++) {
if (MM_CHANNEL_STATE_NOTUSED == my_obj->ch[ch_idx].state) {
ch_obj = &my_obj->ch[ch_idx];
break;
}
}
if (NULL != ch_obj) {
/* initialize channel obj */
memset(ch_obj, 0, sizeof(mm_channel_t));
ch_hdl = mm_camera_util_generate_handler(ch_idx);
ch_obj->my_hdl = ch_hdl;
ch_obj->state = MM_CHANNEL_STATE_STOPPED;
ch_obj->cam_obj = my_obj;
pthread_mutex_init(&ch_obj->ch_lock, NULL);
mm_channel_init(ch_obj, attr, channel_cb, userdata);
}
pthread_mutex_unlock(&my_obj->cam_lock);
return ch_hdl;
}1234567891011121314151617181920212223242526272829303132
该方法又调用mm_camera_channel.c的mm_channel_init方法,进入mm_camera_channel.c的该方法;
//mm_camera_channel.c
int32_t mm_channel_init(mm_channel_t *my_obj,
mm_camera_channel_attr_t *attr,
mm_camera_buf_notify_t channel_cb,
void *userdata)
{
int32_t rc = 0;
my_obj->bundle.super_buf_notify_cb = channel_cb;
my_obj->bundle.user_data = userdata;
if (NULL != attr) {
my_obj->bundle.superbuf_queue.attr = *attr;
}
CDBG("%s : Launch data poll thread in channel open", __func__);
snprintf(my_obj->threadName, THREAD_NAME_SIZE, "DataPoll");
mm_camera_poll_thread_launch(&my_obj->poll_thread[0],
MM_CAMERA_POLL_TYPE_DATA);
/* change state to stopped state */
my_obj->state = MM_CHANNEL_STATE_STOPPED;
return rc;
}1234567891011121314151617181920212223
接着调用mm_camera_thread.c中的mm_camera_poll_thread_launch()方法,
//mm_camera_thread.c
int32_t mm_camera_poll_thread_launch(mm_camera_poll_thread_t * poll_cb,
mm_camera_poll_thread_type_t poll_type)
{
int32_t rc = 0;
size_t i = 0, cnt = 0;
poll_cb->poll_type = poll_type;
//Initialize poll_fds
cnt = sizeof(poll_cb->poll_fds) / sizeof(poll_cb->poll_fds[0]);
for (i = 0; i < cnt; i++) {
poll_cb->poll_fds[i].fd = -1;
}
//Initialize poll_entries
cnt = sizeof(poll_cb->poll_entries) / sizeof(poll_cb->poll_entries[0]);
for (i = 0; i < cnt; i++) {
poll_cb->poll_entries[i].fd = -1;
}
//Initialize pipe fds
poll_cb->pfds[0] = -1;
poll_cb->pfds[1] = -1;
rc = pipe(poll_cb->pfds);
if(rc < 0) {
CDBG_ERROR("%s: pipe open rc=%d\n", __func__, rc);
return -1;
}
poll_cb->timeoutms = -1; /* Infinite seconds */
CDBG("%s: poll_type = %d, read fd = %d, write fd = %d timeout = %d",
__func__, poll_cb->poll_type,
poll_cb->pfds[0], poll_cb->pfds[1],poll_cb->timeoutms);
pthread_mutex_init(&poll_cb->mutex, NULL);
pthread_cond_init(&poll_cb->cond_v, NULL);
/* launch the thread */
pthread_mutex_lock(&poll_cb->mutex);
poll_cb->status = 0;
pthread_create(&poll_cb->pid, NULL, mm_camera_poll_thread, (void *)poll_cb);
if(!poll_cb->status) {
pthread_cond_wait(&poll_cb->cond_v, &poll_cb->mutex);
}
if (!poll_cb->threadName) {
pthread_setname_np(poll_cb->pid, "CAM_poll");
} else {
pthread_setname_np(poll_cb->pid, poll_cb->threadName);
}
pthread_mutex_unlock(&poll_cb->mutex);
CDBG("%s: End",__func__);
return rc;
}
1234567891011121314151617181920212223242526272829303132333435363738394041424344454647484950515253
在这个函数中进行了poll_fds,poll_entries,pipe fds的初始化操作并且调用pthred_create(..,mm_camera_poll_thread,..)启动线程。
//mm_camera_thread.c
static void *mm_camera_poll_thread(void *data)
{
prctl(PR_SET_NAME, (unsigned long)"mm_cam_poll_th", 0, 0, 0);
mm_camera_poll_thread_t *poll_cb = (mm_camera_poll_thread_t *)data;
/* add pipe read fd into poll first */
poll_cb->poll_fds[poll_cb->num_fds++].fd = poll_cb->pfds[0];
mm_camera_poll_sig_done(poll_cb);
mm_camera_poll_set_state(poll_cb, MM_CAMERA_POLL_TASK_STATE_POLL);
return mm_camera_poll_fn(poll_cb);
}12345678910111213
最后返回mm_camera_poll_fn(poll_cb),
//mm_camera_thread.c
static void *mm_camera_poll_fn(mm_camera_poll_thread_t *poll_cb)
{
int rc = 0, i;
if (NULL == poll_cb) {
CDBG_ERROR("%s: poll_cb is NULL!\n", __func__);
return NULL;
}
CDBG("%s: poll type = %d, num_fd = %d poll_cb = %p\n",
__func__, poll_cb->poll_type, poll_cb->num_fds,poll_cb);
do {
for(i = 0; i < poll_cb->num_fds; i++) {
poll_cb->poll_fds[i].events = POLLIN|POLLRDNORM|POLLPRI;
}
rc = poll(poll_cb->poll_fds, poll_cb->num_fds, poll_cb->timeoutms);
if(rc > 0) {
if ((poll_cb->poll_fds[0].revents & POLLIN) &&
(poll_cb->poll_fds[0].revents & POLLRDNORM)) {
/* if we have data on pipe, we only process pipe in this iteration */
CDBG("%s: cmd received on pipe\n", __func__);
mm_camera_poll_proc_pipe(poll_cb);
} else {
for(i=1; i<poll_cb->num_fds; i++) {
/* Checking for ctrl events */
if ((poll_cb->poll_type == MM_CAMERA_POLL_TYPE_EVT) &&
(poll_cb->poll_fds[i].revents & POLLPRI)) {
CDBG("%s: mm_camera_evt_notify\n", __func__);
if (NULL != poll_cb->poll_entries[i-1].notify_cb) {
poll_cb->poll_entries[i-1].notify_cb(poll_cb->poll_entries[i-1].user_data);
}
}
if ((MM_CAMERA_POLL_TYPE_DATA == poll_cb->poll_type) &&
(poll_cb->poll_fds[i].revents & POLLIN) &&
(poll_cb->poll_fds[i].revents & POLLRDNORM)) {
CDBG("%s: mm_stream_data_notify\n", __func__);
if (NULL != poll_cb->poll_entries[i-1].notify_cb) {
poll_cb->poll_entries[i-1].notify_cb(poll_cb->poll_entries[i-1].user_data);
}
}
}
}
} else {
/* in error case sleep 10 us and then continue. hard coded here */
usleep(10);
continue;
}
} while ((poll_cb != NULL) && (poll_cb->state == MM_CAMERA_POLL_TASK_STATE_POLL));
return NULL;
}12345678910111213141516171819202122232425262728293031323334353637383940414243444546474849505152
至此HAL层的初始化工作完成了。
下面是HAL层初始化的时序图:
————————————————
版权声明:本文为CSDN博主「hutongling」的原创文章,遵循CC 4.0 by-sa版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/hutongling/article/details/77053920https://blog.csdn.net/hutongling/article/details/77053920














 250
250











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









