







一、理解电容、电感产生的相位差
对于正弦信号,流过一个元器件的电流和其两端的电压,它们的相位不一定是相同的。这种相位差是如何产生的呢?这种知识非常重要,因为不仅放大器、自激振荡器的反馈信号要考虑相位,而且在构造一个电路时也需要充分了解、利用或避免这种相位差。下面探讨这个问题。
首先,要了解一下一些元件是如何构建出来的;其次,要了解电路元器件的基本工作原理;第三,据此找到理解相位差产生的原因;第四,利用元件的相位差特性构造一些基本电路。
电阻、电感、电容的诞生过程
科学家经过长期的观察、试验,弄清楚了一些道理,也经常出现了一些预料之外的偶然发现,如伦琴发现X射线、居里夫人发现镭的辐射现象,这些偶然的发现居然成了伟大的科学成就。电子学领域也是如此。
科学家让电流流过导线的时候,偶然发现了导线发热、电磁感应现象,进而发明了电阻、电感。科学家还从摩擦起电现象得到灵感,发明了电容。发现整流现象而创造出二极管也是偶然。相关文章:解析二极管的单向导电性。
元器件的基本工作原理
电阻——电能→热能
电感——电能→磁场能,&磁场能→电能
电容——电势能→电场能,&电场能→电流
由此可见,电阻、电感、电容就是能源转换的元件。电阻、电感实现不同种类能量间的转换,电容则实现电势能与电场能的转换。
电阻
电阻的原理是:电势能→电流→热能。
电源正负两端贮藏有电势能(正负电荷),当电势加在电阻两端,电荷在电势差作用下流动——形成了电流,其流动速度远比无电势差时的乱序自由运动快,在电阻或导体内碰撞产生的热量也就更多。
正电荷从电势高的一端进入电阻,负电荷从电势低的一端进入电阻,二者在电阻内部进行中和作用。中和作用使得正电荷数量在电阻内部呈现从高电势端到低电势端的梯度分布,负电荷数量在电阻内部呈现从低电势端到高电势端的梯度分布,从而在电阻两端产生了电势差,这就是电阻的电压降。同样电流下,电阻对中和作用的阻力越大,其两端电压降也越大。
因此,用R=V/I来衡量线性电阻(电压降与通过的电流成正比)的阻力大小。
对交流信号则表达为R=v(t)/i(t)。
注意,也有非线性电阻的概念,其非线性有电压影响型、电流影响型等。
电感
电感的原理:电感——电势能→电流→磁场能,&磁场能→电势能(若有负载,则→电流)。
当电源电势加在电感线圈两端,电荷在电势差作用下流动——形成了电流,电流转变磁场,这称为“充磁”过程。若被充磁电感线圈两端的电源电势差撤销,且电感线圈外接有负载,则磁场能在衰减的过程中转换为电能(如负载为电容,则为电场能;若负载为电阻,则为电流),这称为“去磁”过程。
衡量电感线圈充磁多少的单位是磁链——Ψ。电流越大,电感线圈被冲磁链就越多,即磁链与电流成正比,即Ψ=L*I。对一个指定电感线圈,L是常量。
因此,用L=Ψ/I表达电感线圈的电磁转换能力,称L为电感量。电感量的微分表达式为:L=dΨ(t)/di(t)。
根据电磁感应原理,磁链变化产生感应电压,磁链变化越大则感应电压越高,即v(t)=d dΨ(t)/dt。
综合上面两公式得到:v(t)=L*di(t)/dt,即电感的感应电压与电流的变化率(对时间的导数)成正比,电流变化越快则感应电压越高。
电容
电容的原理:电势能→电流→电场能,电场能→电流。
当电源电势加在电容的两个金属极板上,正负电荷在电势差作用下分别向电容两个极板聚集而形成电场,这称为“充电”过程。若被充电电容两端的电源电势差撤销,且电容外接有负载,则电容两端的电荷在其电势差下向外流走,这称为“放电”过程。电荷在向电容聚集和从电容两个极板向外流走的过程中,电荷的流动就形成了电流。
要特别注意,电容上的电流并不是电荷真的流过电容两个极板间的绝缘介质,而只是充电过程中电荷从外部向电容两个极板聚集形成的流动,以及放电过程中电荷从电容两个极板向外流走而形成的流动。也就是说,电容的电流其实是外部电流,而非内部电流,这与电阻、电感都不一样。
衡量电容充电多少的单位是电荷数——Q。电容极板间电势差越大,说明电容极板被冲电荷越多,即电荷数与电势差(电压)成正比,即Q=C*V。对指定电容,C是常量。
因此,用C=Q/V表达电容极板贮存电荷的能力,称C为电容量。
电容量的微分表达式为:C=dQ(t)/dv(t)。
因为电流等于单位时间内电荷数的变化量,即i(t)=dQ(t)/dt,综合上面两个公式得到:i(t)=C*dv(t)/dt,即电容电流与其上电压的变化率(对时间的导数)成正比,电压变化越快则电流越大。
小结:v(t)=L*di(t)/dt
表明电流变化形成了电感的感应电压(电流不变则没有感应电压形成)。
i(t)=C*dv(t)/dt表明电压变化形成了电容的外部电流(实际是电荷量变化。电压不变则没有电容的外部电流形成)。
元件对信号相位的改变
首先要提醒,相位的概念是针对正弦信号而言的,直流信号、非周期变化信号等都没有相位的概念。
电阻上的电压电流同相位
因为电阻上电压v(t)=R*i(t),若i(t)=sin(ωt+θ),则v(t)=R* sin(ωt+θ)。所以,电阻上电压与电流同相位。
电感上的电流落后电压90°相位
因为电感上感应电压v(t)=L*di(t)/dt,若i(t)=sin(ωt+θ),则v(t)=L*cos(ωt+θ)。 所以,电感上电流落后感应电压90°相位,或者说感应电压超前电流90°相位。
直观理解:设想一个电感与电阻串联充磁。从充磁过程看,充磁电流的变化引起磁链的变化,而磁链的变化又产生感应电动势和感应电流。根据楞次定律,感应电流方向与充磁电流相反,延缓了充磁电流的变化,使得充磁电流相位落后于感应电压。
电容上的电流超前电压90°相位
因为电容上电流i(t)=C*dv(t)/dt,若v(t)=sin(ωt+θ),则i(t)=L*cos(ωt+θ)。
所以,电容上电流超前电压90°相位,或者说电压落后电流90°相位。
直观理解:设想一个电容与电阻串联充电。从充电过程看,总是先有流动电荷(即电流)的积累才有电容上的电压变化,即电流总是超前于电压,或者说电压总是落后于电流。
下面的积分方程能体现这种直观性:
v(t)=(1/C)*∫i(t)*dt=(1/C)*∫dQ(t),即电荷变化的积累形成了电压,故dQ(t)相位超前v(t);而电荷积累的过程就是电流同步变化的过程,即i(t)与dQ(t)同相。因此i(t)相位超前于v(t)。
元件相位差的应用
RC文氏桥、LC谐振过程的理解
无论RC文氏桥,还是LC的串联谐振、并联谐振,都是由电容或/和电感容元件的电压、电流相位差引起的,就像机械共振的节拍一样。
当两个频率相同、相位相位的正弦波叠加时,叠加波的幅度达到最大值,这就是共振现象,在电路里称为谐振。
两个频率相同、相位相反的正弦波叠加,叠加波的幅度会降到最低,甚至为零。这就是减小或吸收振动的原理,如降噪设备。
当一个系统中有多个频率信号混合时,如果有两个同频信号产生了共振,那么这个系统中其它振动频率的能量就被这两个同频、同相的信号所吸收,从而起到了对其它频率的过滤作用。这就是电路中谐振过滤的原理。
谐振需要同时满足频率相同和相位相同两个条件。电路如何通过幅度-频率特性选择频率的方法以前在RC文氏桥中讲过,LC串并联的思路与RC相同,这里不再赘述。
下面我们来看看电路谐振中相位补偿的粗略估计(更精确的相位偏移则要计算)
RC文氏桥的谐振(图1)
若没有C2,正弦信号Uo的电流由C1→R1→R2,通过R2上压降形成Uf输出电压。由于支路电流被电容C1移相超前Uo 90°,这超前相位的电流流过R2(电阻不产生相移!),使得输出电压Uf电压超前于Uo 90°。
在R2上并联C2,C2从R2取得电压,由于电容对电压的滞后作用,使得R2上电压也被强制滞后。(但不一定有90°,因为还有C1→R1→C2电流对C2上电压即Uf的影响,但在RC特征频率上,并联C2后Uf输出相位与Uo相同。)
小结:并联电容使得电压信号相位滞后,称为电压相位的并联补偿。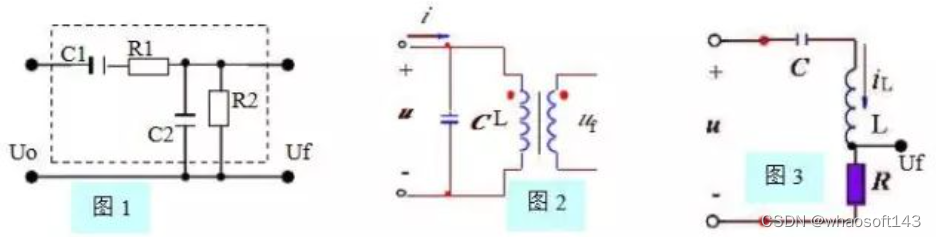 LC并联谐振(图2)
LC并联谐振(图2)
若没有电容C,正弦信号u通过L感应到次级输出Uf,Uf电压超前于u 90°;在L初级并联电容C,由于电容对电压的滞后作用,使得L上电压也被强制滞后90°。因此,并联C后Uf输出相位与u相同。 whaosoft aiot http://143ai.com
LC串联谐振(图3)
对于输入正弦信号u,电容C使得串联回路中负载R上的电流相位超前于u 90°,电感L则使得同一串联回路中的电流相位再滞后90°二者相位偏移刚好抵消。因此,输出Uf与输入u同相。
总结
注意,相位影响不一定都是90°,与其它部分相关,具体则要计算。
-
串联电容使得串联支路电流相位超前,从而影响输出电压相位。
-
并联电容使得并联支路电压相位滞后,从而影响输出电压相位。
-
串联电感使得串联支路电流相位滞后,从而影响输出电压相位。
-
并联电感使得并联支路支路电压超前,从而影响输出电压相位。
更简洁的记忆:
在元件上的电流或电压,电容使电流相位超前,电感使电压相位超前。
二、单片机实现电机的PID控制
PID控制应该算是非常古老而且应用非常广泛的控制算法了,小到热水壶温度控制,大到控制无人机的飞行姿态和飞行速度等等。在电机控制中,PID算法用得尤为常见。
位置式PID
1 计算公式
在电机控制中,我们给电机输出的是一个PWM占空比的数值。
话不多说,直接上位置式PID基本公式: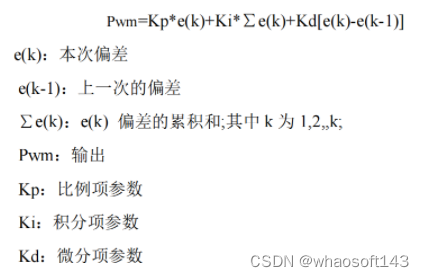
控制流程图如下: 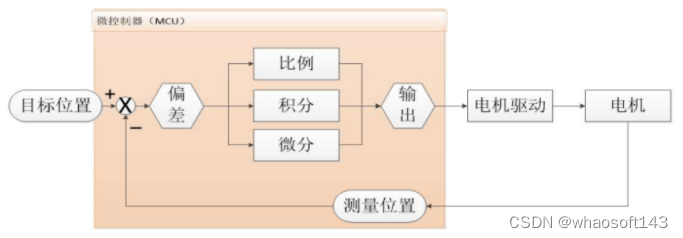 上图中的目标位置一般我们可以通过按键或者开关等方式编程实现改变目标值,测量位置就是通过 stm32 去采集编码器的数据。
上图中的目标位置一般我们可以通过按键或者开关等方式编程实现改变目标值,测量位置就是通过 stm32 去采集编码器的数据。
目标位置和测量位置之间作差就是目前系统的偏差。送入 PID 控制器进行计算输出,然后再经过电机驱动的功率放大控制电机的转动去减小偏差, 最终达到目标位置的过程。
2 C语言实现
如何把我们以上的理论分析和控制原理图使用 C 语言写出来呢,这是一个有趣且实用的过程。位置式 PID 具体通过 C 语言实现的代码如下:
int Position_PID (int Encoder,int Target)
{
static float Bias,Pwm,Integral_bias,Last_Bias;
Bias=Target- Encoder; //计算偏差
Integral_bias+=Bias; //求出偏差的积分
//PID基本公式
Pwm=Position_KP*Bias+Position_KI*Integral_bias+Position_KD*(Bias-Last_Bias);
Last_Bias=Bias; //保存上一次偏差
return Pwm; //输出
}入口参数为编码器的位置测量值和位置控制的目标值,返回值为电机控制PWM(现在再看一下上面的控制框图是不是更加容易明白了)。
第一行是相关内部变量的定义。
第二行是求出位置偏差,由测量值减去目标值。
第三行通过累加求出偏差的积分。
第四行使用位置式 PID 控制器求出电机 PWM。
第五行保存上一次偏差,便于下次调用。
最后一行是返回。
增量式PID
1 计算公式
速度闭环控制就是根据单位时间获取的脉冲数(这里使用了 M 法测速)测量电机的速度信息,并与目标值进行比较,得到控制偏差,然后通过对偏差的比例、积分、微分进行控制,使偏差趋向于零的过程。
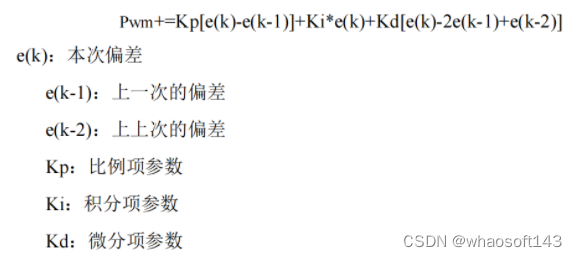
在我们的速度控制闭环系统里面只使用 PI 控制,因此对 PID 控制器可简化
为以下公式: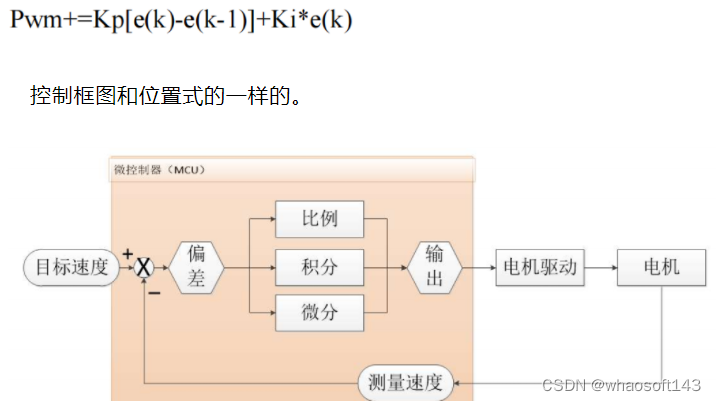 上图中的目标速度一般我们可以通过按键或者开关等方式编程实现改变目标值,测量速度前面在编码器的章节已经有说到就是通过单片机定时去采集编码器的数据并清零。
上图中的目标速度一般我们可以通过按键或者开关等方式编程实现改变目标值,测量速度前面在编码器的章节已经有说到就是通过单片机定时去采集编码器的数据并清零。
目标速度和测量速度之间做差就是目前系统的偏差。送入 PID 控制器进行计算输出,然后再经过电机驱动的功率放大控制电机的转动去减小偏差, 最终达到目标速度的过程。
2 C语言实现
如何把我们以上的理论分析和控制原理图使用 C 语言写出来呢,这是一个有趣且实用的过程。位置式 PID 具体通过 C 语言实现的代码如下:
int Incremental_PI (int Encoder,int Target)
{
static float Bias,Pwm,Last_bias;
Bias=Encoder-Target; //计算偏差
//增量式 PI 控制器
Pwm+=Velocity_KP*(Bias-Last_bias)+Velocity_KI*Bias;
Last_bias=Bias; //保存上一次偏差
return Pwm; //增量输出
}入口参数为编码器的速度测量值和速度控制的目标值,返回值为电机控制 PWM。
第一行是相关内部变量的定义。
第二行是求出速度偏差,由测量值减去目标值。
第三行使用增量 PI 控制器求出电机 PWM。
第四行保存上一次偏差,便于下次调用。
最后一行是返回。
P、I、D各个参数的作用
自动控制系统的性能指标主要有三个方面:稳定性、快速性、准确性。
稳定性:
系统在受到外作用后,若控制系统使其被控变量随时间的增长而最终与给定期望值一致,则称系统是稳定的,我们一般称为系统收敛。
如果被控量随时间的增长,越来越偏离给定值,则称系统是不稳定的,我们一般称为系统发散。稳定的系统才能完成自动控制的任务,所以,系统稳定是保证控制系统正常工作的必要条件。
一个稳定的控制系统其被控量偏离给定值的初始偏差应随时间的增长逐渐减小并趋于零。
快速性:
快速性是指系统的动态过程进行的时间长短。过程时间越短,说明系统快速性越好,过程时间持续越长,说明系统响应迟钝,难以实现快速变化的指令信号。
稳定性和快速性反映了系统在控制过程中的性能。系统在跟踪过程中,被控量偏离给定值越小,偏离的时间越短,说明系统的动态精度偏高。
准确性:
是指系统在动态过程结束后,其被控变量(或反馈量)对给定值的偏差而言,这一偏差即为稳态误差,它是衡量系统稳态精度的指标,反映了动态过程后期的性能。
在实践生产工程中,不同的控制系统对控制器效果的要求不一样。比如平衡车、倒立摆对系统的快速性要求很高,响应太慢会导致系统失控。
智能家居里面的门窗自动开合系统,对快速性要求就不高,但是对稳定性和准确性的要求就很高,所以需要严格控制系统的超调量和静差。
三、EMI、EMS以及EMC的区别
电子产品的电磁辐射问题越来越受到关注,相信大多数都对于EMC(电磁兼容性)这个名词也不陌生,因为要获得我国的3C认证就必须通过专业机构的EMC测试。但是,在各种媒体报道和产品宣传当中,与之类似的EMI、EMS等专业名词也常常出现在大家面前,它们似乎都与防辐射(电磁辐射)有关,让人不明就里。那么,它们究竟有什么异同呢?
EMI——攻击力
EMI(Electro Magnetic Interference)直译是“电磁干扰”,是指电子设备(干扰源)通过电磁波对其他电子设备产生干扰的现象。例如当我们看电视的时候,旁边有人使用电吹风或电剃须刀之类的家用电器,电视屏幕上会出现的雪花噪点;电饭锅煮不熟米饭;关闭了的空调会自行启动……这些都是常见的电磁干扰现象。
更为严重的是,如果电磁干扰信号妨碍了正在监视病情的医疗电子设备或正在飞行的飞机,则会造成不堪设想的后果。从这些例子来看,就好像是电子设备具有无形的“攻击力”,对其他电子设备的正常运行造成了扰乱和破坏。

电源的一二级EMI滤波电路,是为降低电源的电磁传导干扰而设计的。
从“攻击”方式上看,EMI主要有两种类型:传导干扰和辐射干扰。电磁传导干扰是指干扰源通过导电介质(例如电线)把自身电网络上的信号耦合(干扰)到另一个电网络。
最常见的例子是我们电脑中的电源会对家里的用电网络产生影响,在电脑开机的同时家里的电灯可能会变暗,这在使用杂牌劣质电源的电脑上表现得更为明显。而在当今电源的内部结构中,一二级EMI滤波电路是必不可少的,这里的“EMI”针对的就是电磁传导干扰,以防止电源工作时对外界产生太大的影响。

机箱上的EMI触点,是为降低屏蔽机箱内部的电磁辐射干扰而设计的。
电磁辐射干扰往往被我们简称为电磁辐射,它是指干扰源通过空间把自身电网络上的信号耦合(干扰)到另一个电网络,就像是武侠小说中的“隔空打物”。由于人体生命活动包含一系列的生物电活动,这些生物电对环境的电磁波非常敏感,因此过量的电磁辐射可以对人体造成影响和损害。人们常常担忧的“辐射”也就是指这部分电磁辐射干扰。应用机箱上的种种防辐射设计,例如EMI弹片、EMI触点,这里“EMI”针对的就是电磁辐射干扰,以减小机箱内电磁波传播到外部的量。
EMS——防御力
有矛就有盾,有电磁干扰就有抗电磁干扰。下面请出我们的第二位主角EMS。EMS(Electro Magnetic Susceptibility)直译是“电磁敏感度”,是指由于电子设备受到外界的电磁能量,造成自身性能下降的容易程度。例如同样受到电吹风或电剃须刀的干扰,有些电视机的屏幕上出现了雪花噪点,有些电视机却安然无恙。这表明在受到电磁干扰“攻击”的情况下,前者的电磁敏感度较高,更易受伤,也就是“防御力”较低;而后者的电磁敏感度较低,不易受伤,即“防御力”较高。
电视画面雪花严重,受其它电子设备干扰是一大因素。
EMC——综合攻防能力
有了矛,也有了盾,最后就用它俩一起来武装我们的第三位主角EMC。
EMC测试中使用电磁兼容实验室,可进行电磁辐射干扰测试。
EMC(Electro Magnetic Compatibility)直译是“电磁兼容性”,是指电子设备所产生的电磁能量既不对其他电子设备产生干扰,也不受其他电子设备的电磁能量干扰的能力。因此,EMC包括EMI和EMS两个方面的要求:一方面要求电子设备在正常运行过程中对所在环境产生的电磁干扰不能超过一定的限值,即EMI;另一方面要求电子设备对所在环境中存在的电磁干扰具有一定程度的抗干扰能力,即EMS。
具体在对电子设备进行EMC测试时,相关标准规定了EMI的最大值,以及EMS的最小值,就犹如限制“攻击力”在较低水平、要求“防御力”在较高水平。这也很好理解,就像我们养一条看门狗,你不希望它主动跑出门去乱咬人,但你要求它在敌人来犯时要扛得住。
3C认证包含EMC标准
现在大家知道了,好的电子设备应该是一个“低攻高防”的角色,既对外界产生的干扰小,又能很好地抵抗来自外界的干扰。
那么如何选购这样的产品呢?其实国家法规已经为我们做好了准备。自1996年开始,欧共体就对其统一市场作出了规定:任何没有“CE”认证标记的电气和电子设备不得进入欧共体市场。我国政府也已作出规定,自2003年8月1日起,任何没有“CCC”(即3C)认证标志的电气和电子设备不得进入中国市场。而CE认证和3C认证均包含了对EMC的要求。因此,大家在购买电子产品时,只要看它的外壳或包装上有没有“CE”和“CCC”标志,就可以知道它是否具有符合国家规定的低干扰(包括低辐射)、高抗干扰的特性。
四、滤波器设计
什么是滤波器?
各种传感器信号多多少少会携带一些噪声信号,那么通过滤波器就能够更好的降低和去除噪声,还原真实有用信号。
滤波器是一个电路,其去除或“过滤掉”频率分量的特定范围。换句话说,它将信号的频谱分离为将要通过的频率分量和将被阻隔的频率分量。
如果您对频域分析没有太多经验,您可能仍然不确定这些频率成分是什么,以及它们如何在不能同时具有多个电压值的信号中共存。让我们看一个有助于澄清这个概念的简短例子。
假设我们有一个由完美的5kHz正弦波组成的音频信号。我们知道时域中的正弦波是什么样的,在频域中我们只能看到5kHz的频率“尖峰”。现在让我们假设我们激活一个500kHz振荡器,将高频噪声引入音频信号。
在示波器上看到的信号仍然只是一个电压序列,每个时刻有一个值,但信号看起来会有所不同,因为它的时域变化现在必须反映5kHz正弦波和高频噪音波动。
然而,在频域中,正弦波和噪声是在一个信号中同时存在的单独的频率分量。正弦波和噪声占据了信号频域表示的不同部分,这意味着我们可以通过将信号引导通过低频并阻挡高频的电路来滤除噪声。正弦波和噪声信号频域的不同部分分布示意图,如下。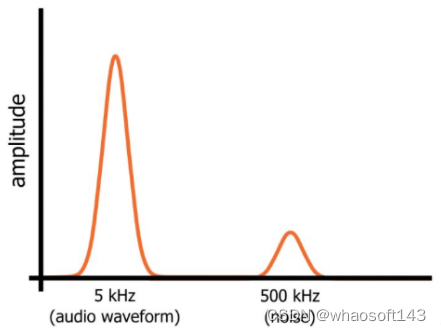
滤波器的类型
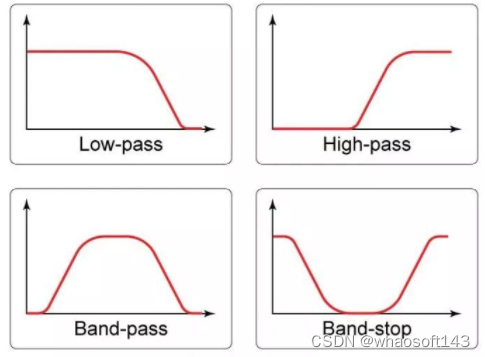
滤波器可以放在与滤波器频率响应的一般特征相对应的广泛类别中。如果滤波器通过低频并阻止高频,则称为低通滤波器;如果它阻挡低频并通过高频,它就是一个高通滤波器。还有带通滤波器,其仅通过相对窄的频率范围,以及带阻滤波器,其仅阻挡相对窄的频率范围。各滤波器频域表示,如下图所示。
还可以根据用于实现电路的组件类型对滤波器进行分类。无源滤波器使用电阻器,电容器和电感器,这些组件不具备提供放大的能力,因此无源滤波器只能维持或减小输入信号的幅度。另一方面,有源滤波器既可以滤波信号又可以应用增益,因为它包括有源元件,如晶体管或运算放大器,如下图。
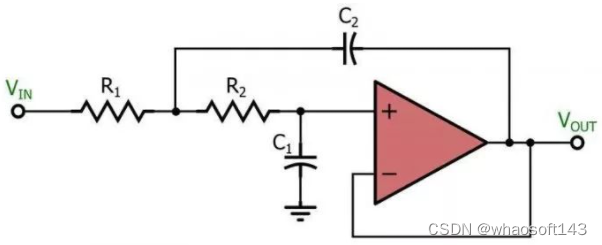
这种有源低通滤波器基于流行的Sallen-Key拓扑结构。
RC低通滤波器
为了创建无源低通滤波器,我们需要将电阻元件与电抗元件组合在一起。换句话说,我们需要一个由电阻器和电容器或电感器组成的电路。从理论上讲,电阻—电感(RL)低通拓扑在滤波能力方面与电阻—电容(RC)低通拓扑相当。但实际上,电阻—电容方案更为常见,因此本文的其余部分将重点介绍RC低通滤波器。RC低通滤波器示意图如下。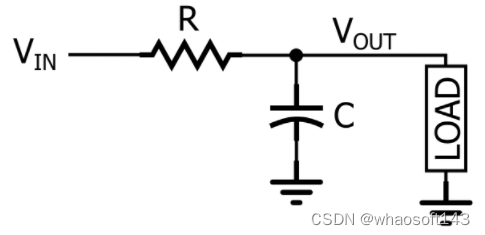
如图所示,通过将一个电阻与信号路径串联,并将一个电容与负载并联,可以产生RC低通响应。在图中,负载是单个组件,但在实际电路中,它可能更复杂,例如模数转换器,放大器或示波器的输入级,用于测量滤波器的响应。
如果我们认识到电阻器和电容器形成与频率相关的分压器,就可以直观地分析RC低通拓扑的滤波动作。重新绘制RC低通滤波器,使其看起来像分压器,如下图。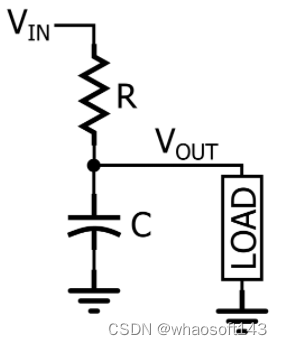
当输入信号的频率低时,电容器的阻抗相对于电阻器的阻抗高;因此,大部分输入电压在电容器上(和负载两端,与电容器并联)下降。当输入频率较高时,电容器的阻抗相对于电阻器的阻抗较低,这意味着电阻器上的电压降低,并且较少的电压传输到负载。因此,低频通过并且高频被阻挡。
RC低通功能的这种定性解释是重要的第一步,但是当我们需要实际设计电路时它并不是很有用,因为术语“高频”和“低频”非常模糊。工程师需要创建通过并阻止特定频率的电路。例如,在上述音频系统中,我们希望保留5kHz信号并抑制500kHz信号。这意味着我们需要一个滤波器,从5kHz到500kHz之间的传递过渡到阻塞。
RC滤波器截止频率
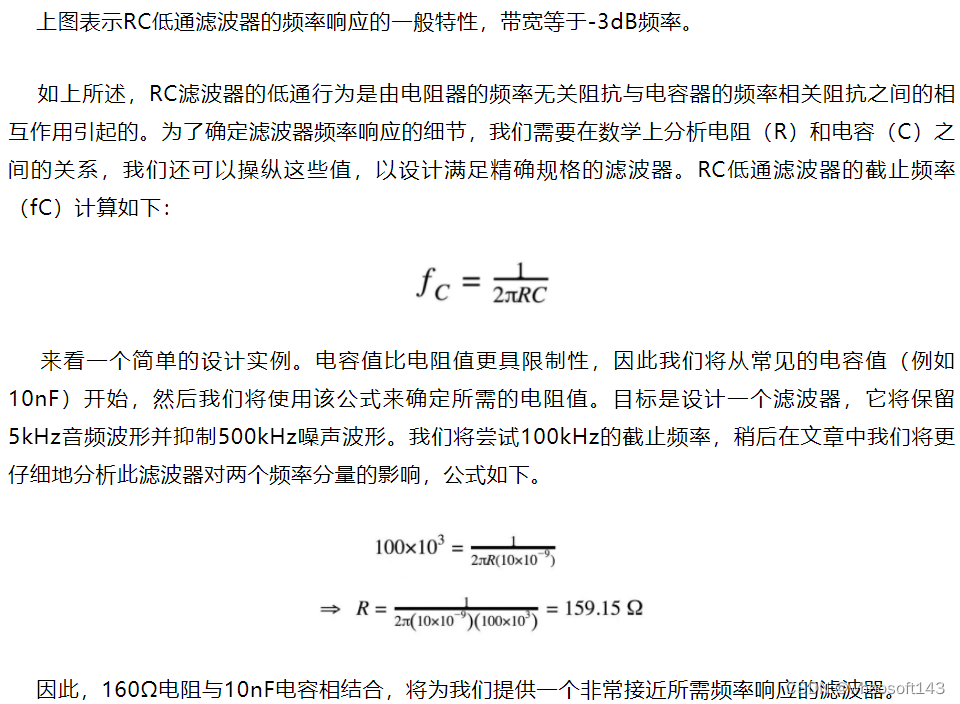
滤波器不会引起显著衰减的频率范围称为通带,滤波器确实导致显着衰减的频率范围称为阻带。模拟滤波器,例如RC低通滤波器,总是从通带逐渐过渡到阻带。这意味着无法识别滤波器停止传递信号并开始阻塞信号的一个频率。然而,工程师需要一种方便,简洁地总结滤波器频率响应的方法,这就是截止频率概念发挥作用的地方。
当您查看RC滤波器的频率响应图时,您会注意到术语“截止频率”不是很准确。信号光谱被“切割”成两半的图像,其中一个被保留而其中一个被丢弃,不适用,因为随着频率从截止点下方移动到截止值以上,衰减逐渐增加。
RC低通滤波器的截止频率实际上是输入信号幅度降低3dB的频率(选择该值是因为幅度降低3dB对应于功率降低50%)。因此,截止频率也称为-3dB频率,实际上该名称更准确且信息量更大。术语带宽是指滤波器通带的宽度,在低通滤波器的情况下,带宽等于-3dB频率,如下图所示。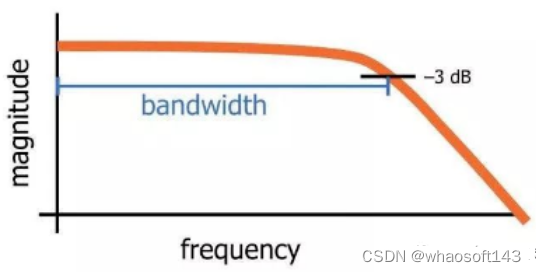
滤波器响应可视化
评估滤波器对信号影响的最方便方法是检查滤波器频率响应的图。这些图形通常称为波德图,在垂直轴上具有幅度(以分贝为单位),在水平轴上具有频率;水平轴通常具有对数标度,使得1Hz和10Hz之间的物理距离与10Hz和100Hz之间,100Hz和1kHz之间的物理距离相同等等。这种配置使我们能够快速准确地评估滤波器在很大频率范围内的行为。如下图,是频率响应图的一个例子。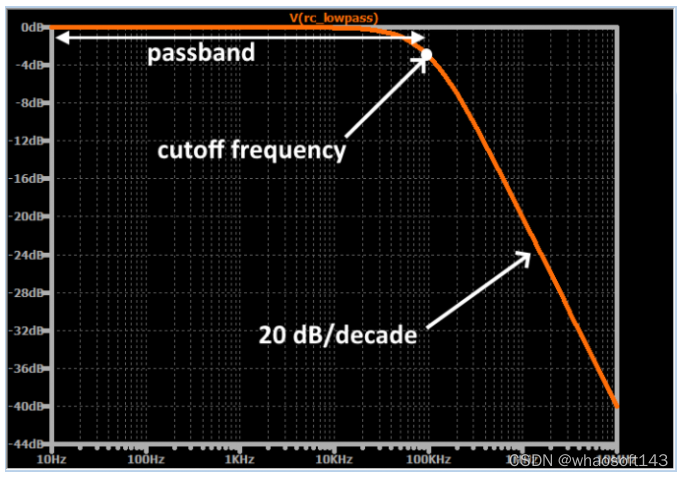 曲线上的每个点表示如果输入信号的幅度为1V且频率等于水平轴上的相应值,则输出信号将具有的幅度。例如,当输入频率为1MHz时,输出幅度(假设输入幅度为1V)将为0.1V(因为-20dB对应于十倍减少因子)。
曲线上的每个点表示如果输入信号的幅度为1V且频率等于水平轴上的相应值,则输出信号将具有的幅度。例如,当输入频率为1MHz时,输出幅度(假设输入幅度为1V)将为0.1V(因为-20dB对应于十倍减少因子)。
当您花费更多时间使用滤波器电路时,此频率响应曲线的一般形状将变得非常熟悉。通带中的曲线几乎完全平坦,然后随着输入频率接近截止频率,它开始下降得更快。最终,衰减的变化率(称为滚降)稳定在20dB/decade-即,输入频率每增加十倍,输出信号的幅度降低20dB。
评估低通滤波器性能
如果我们仔细绘制我们在本文前面设计的滤波器的频率响应,我们将看到5kHz时的幅度响应基本上是0dB(即几乎为零衰减),500kHz时的幅度响应约为-14dB(对应于0.2的增益)。这些值与我们在上一节中执行的计算结果一致。
由于RC滤波器总是从通带到阻带逐渐过渡,并且因为衰减永远不会达到无穷大,我们无法设计出“完美”的滤波器—即对正弦波没有影响并完全消除噪声的滤波器。相反,我们总是需要权衡。如果我们将截止频率移近5kHz,我们将有更多的噪声衰减,但我们想要发送到扬声器的正弦波也会衰减更多。如果我们将截止频率移近500kHz,我们在正弦波频率下的衰减会减少,但噪声频率下的衰减也会减少。
前面我们已经讨论了滤波器修改信号中各种频率分量振幅的方式。然而,除了振幅效应之外,电抗性电路元件总是引入相移。
低通滤波器相移
相位的概念是指周期内特定时刻的周期信号的值。因此,当我们说电路引起相移时,我们的意思是它会在输入信号和输出信号之间产生偏差:输入和输出信号不再在同一时刻开始和结束它们的周期。相移值(例如45°或90°)表示产生的偏差量。
电路中的每个电抗元件都会引入90°的相移,但这种相移不会同时发生。输出信号的相位与输出信号的振幅一样,随着输入频率的增加而逐渐变化。RC低通滤波器中有一个电抗元件(电容器),因而电路最终也会引入90°的相移。
与振幅响应一样,通过检查水平轴表示对数频率的曲线图,可以最容易地评估相位响应。以下描述表示了一般模式,查看下图可以进一步了解详细信息。
-
相移最初为0°
-
相移逐渐增加,直到在截止频率处达到45°,在这部分响应期间,变化率逐渐增加
-
在截止频率之后,相移继续增加,但变化率逐渐降低
-
随着相移逐渐接近90°,变化率变得非常小
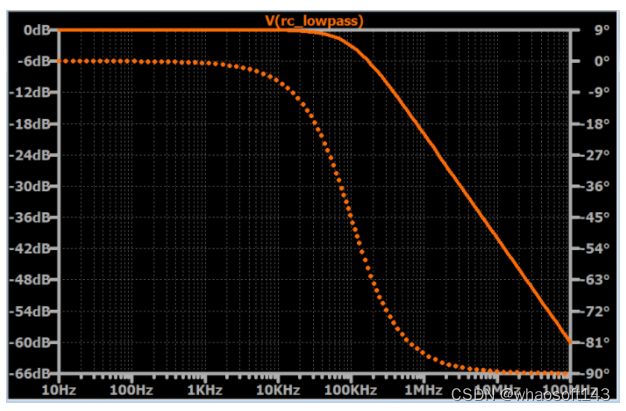
实线是振幅响应,虚线是相位响应。截止频率为100kHz。注意,截止频率下的相移为45°。
二阶低通滤波器
到目前为止,我们假设RC低通滤波器由一个电阻器和一个电容器组成。这种配置是一阶滤波器。相关推荐:
无源滤波器的“阶数”由电路中电抗元件(即电容器或电感器)的数量决定。高阶滤波器具有更多的无功元件,会产生更多的相移和更陡的滚降,而后者是增加滤波器阶数的主要动机。
向滤波器添加一个电抗元件,例如,从一阶到二阶或二阶到三阶,便可将最大滚降增加20dB/十倍。
二阶滤波器通常围绕由电感器和电容器组成的谐振电路构建,这种拓扑结构称为RLC(Resistor-Inductor-Capacitor)。但是,也可以创建二阶RC滤波器。如下图所示,我们需要做的就是将两个一阶RC滤波器级联起来。

虽然这种拓扑肯定会产生二阶响应,但它没有被广泛使用,其频率响应通常不如二阶有源滤波器或二阶RLC滤波器。
二阶RC滤波器的频率响应
我们可以尝试根据所需的截止频率设计一阶滤波器,然后从中选择两个串联连接来,从而构成二阶RC低通滤波器。此举确实可以使滤波器表示出类似的总频率响应,最大滚降为40dB/decade而不是20dB/decade。
但是,如果我们更仔细地观察响应,我们会发现-3dB频率出现降低。二阶RC滤波器的行为不符合预期,因为两个滤波阶段不是独立的,因此不能简单地将这两个滤波器连接在一起,并将电路分析为一阶低通滤波器叠加一个相同的一阶低通过滤。
此外,即使我们在两级之间插入缓冲器,使得第一阶RC和第二阶RC可以用作独立滤波器,此时原始截止频率处的衰减将是6dB而不是3dB。这恰恰是因为两阶独立工作而导致的。第一个滤波器在截止频率处具有3dB的衰减,而第二个滤波器加上了另外3dB的衰减,如下图。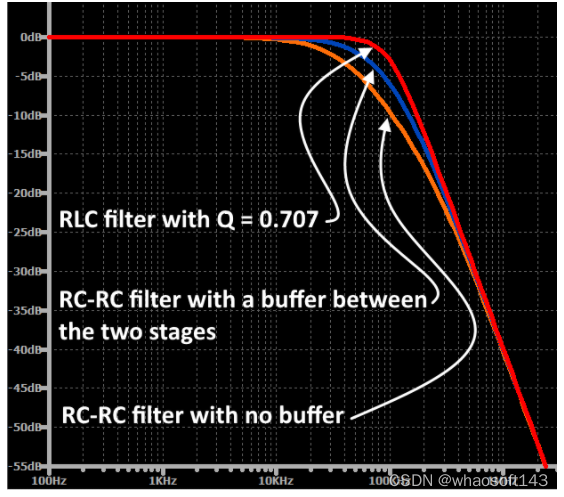
二阶RC低通滤波器的基本限制是设计人员无法通过调整滤波器的Q因子来微调从通带到阻带的转换;此参数表示频率响应的阻尼程度。如果将两个相同的RC低通滤波器级联,则整体传递函数对应于二阶响应,但Q因子始终为0.5。当Q=0.5时,滤波器处于过阻尼的边界,这会导致频率响应在过渡区域中“下垂”。二阶有源滤波器和二阶谐振滤波器没有这一限制;设计人员可以控制Q因子,从而微调过渡区域的频率响应。whaosoft aiot http://143ai.com
总结
所有电信号都混合了所需频率分量和不需要的频率分量。不需要的频率分量通常由噪声和干扰引起,并且在某些情况下会对系统的性能产生负面影响。
滤波器是以不同方式对信号频谱的不同部分作出反应的电路。低通滤波器旨在让低频分量通过,同时阻止高频分量。
低通滤波器的截止频率表示滤波器从低衰减变为显著衰减的频率区域。
RC低通滤波器的输出电压可以通过将电路视为由(频率无关)电阻和(频率相关)电抗组成的分压器来计算。
振幅(以dB为单位,在垂直轴上)与对数频率(以赫兹为单位,在水平轴上)的曲线图是检查滤波器理论行为的方便有效的方法,还可以使用相位与对数频率的关系图来确定将要应用于输入信号的相移量。
二阶滤波器的滚降更陡峭;当信号不能在所需频率分量和不需要的频率分量之间提供宽带分离时,这种二阶响应比较有用。
可以通过构建两个相同的一阶RC低通滤波器,然后将一个的输出连接到另一个的输入来创建二阶RC低通滤波器,但最终整体的-3dB频率将低于预期。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









