







伯德图
概念
伯德图(Bode plot)是一种用于描述线性时不变系统(LTI系统)频率响应特性的图形工具。它由两个主要部分组成:幅度响应图和相位响应图。下面是伯德图的详细定义:
1. 幅度响应图
- 定义为系统增益的对数形式,通常以分贝(dB)为单位。分贝是相对于参考值的增益的对数表示,计算公式为:
,
其中 是系统的频率响应函数,
是角频率。
- 通常在对数频率轴上绘制,频率轴以对数尺度表示,使得在低频和高频区域的变化更加明显。
-
当增益在0dB以上时,系统具有正增益裕度,属于稳定区域;反之,则属于不稳定区域1。
2. 相位响应图:
- 表示系统输出相对于输入的相位延迟,通常以度或弧度为单位。
- 相位图通常在对数频率轴上绘制,以展示不同频率下系统的相位变化。
- 当相位在-180°以上时,系统具有正相位裕度,属于稳定区域;反之,则属于不稳定区域1。
稳定性分析
伯德图提供了一种直观的方法来评估和预测系统的稳定性。然而,需要注意的是,伯德图分析适用于线性系统,使用伯德图分析系统稳定性的要点:
1. 增益裕度(Gain Margin, GM):
- 增益裕度是指系统增益在达到1(或0 dB)之前的最大值,即系统在达到单位增益稳定边界之前的增益余量。
- 在伯德图的幅度响应图中,增益裕度可以通过查找幅度曲线上0 dB线与系统曲线的交点来确定。
- 如果增益裕度大于0 dB,系统在该频率下是稳定的。
2. 相位裕度(Phase Margin, PM):
- 相位裕度是指在系统增益为1(或0 dB)时,系统相位与-180度(或π弧度)之间的差值。
- 在伯德图的相位响应图中,相位裕度可以通过查找增益为0 dB时的相位值,并从-180度中减去这个值来确定。
- 如果相位裕度大于0度,系统在该频率下是稳定的。
3. 奈奎斯特判据:通过伯德图,可以间接应用奈奎斯特判据来分析稳定性。如果系统的伯德图在增益为1的频率范围内没有环绕奈奎斯特图的(-1, j0)点,则系统是稳定的。
4. Bode稳定性准则:
- 根据Bode判据,如果系统在低频时具有正的相位裕度,并且在增益裕度为正值的情况下,系统是稳定的。
- 具体来说,如果系统的伯德图在增益为1时的相位小于-180度,那么系统将不稳定。
5. 频率响应:
- 观察系统在不同频率下的幅度和相位响应,可以了解系统对不同频率信号的响应特性。
- 系统的带宽可以通过查找幅度下降3 dB的频率点来确定。
6. 其他:稳定性分析通常需要同时考虑增益裕度和相位裕度。即使增益裕度很大,如果相位裕度很小,系统也可能不稳定。
公式计算
传递函数的相位角是指在复频域中,系统传递函数 的相位角随频率变化的特性。传递函数通常为比率形式:
,其中,N(s) 是分子多项式,D(s)是分母多项式。传递函数的相位角可以通过以下步骤来计算:
1. 复频域表示:将传递函数中的复频域变量 替换为
(其中
是虚数单位,
是角频率)。
2. 分解为实部和虚部:将 表示为其实部和虚部的比值:
3. 计算幅值和相位角:使用以下公式计算幅值 和相
位角 :
4. 考虑符号:由于 函数只返回
到
之间的值,而传递函数的相位角可能在
到
之间,因此需要考虑实部和虚部的符号来确定正确的象限:
- 如果
和
同号,则使用
的结果。
- 如果
5. 极点和零点的影响:传递函数的相位角也可以通过考虑其极点和零点的影响来计算。每个极点和零点对相位角的贡献可以表示为:
- 极点相位贡献:
- 零点相位贡献:
其中和
分别是极点和零点的实部。
6. 总相位角:将所有极点和零点的相位角贡献相加,得到总的相位角:
伯德图测试
这里主要针对实际的实物系统介绍,伯德图同样可以通过MATLAB搭建模型软件仿真获取,但如果对实物无法获取器软件模型或者较难获取则会无法通过仿真获取。针对这种情况可以通过仪器测试快速获得伯德图,另一方面也可以通过这种方法来确认理论计算或仿真的获得的结果是否与实际产品符合,并且可以根据当前获得的伯德图如何去调试和补偿实际的的系统,从而促使系统有一个不稳定或相对稳定的系统朝向一个更稳定的系统进行。
对于实际项目开发中,大多数情况是通过实际开发得到相应的实际产品电路,对实际产品电路测试获取硬件的传递函数。这一步当然也可以通过电路仿真实现,但电路仿真始终处于相对理想的状态,将理想模型等效电路通过使用PCB以及具体的电子器件搭建出来的实物,由于各种工艺误差会导致实际仿真得到的模型与产品实物实际测试获得的模型存在一定的差距(即G(s)的获取)。 故对于仿真后的结果通常更加适用与原理性产品的验证,而非代替实际产品的输出结果,因此这里我们需要测试实际电路的伯德图,一方面可以验证实物是否符合理论设计,另一方面可用作系统设计更准确的数据用作后续设计进行调整。H(s)可以通过软件计算的原因是由于,软件设计的情况相对理想一些,存在的误差主要来源于软件指令执行的时间差,而这一部分时间差在实时系统或软件设计中是可以工程师人为设计保证的,故可以小根据先前硬件测试说得的模型去使用理论模型进行补偿。而无需实验测试。当然设计完成后同样需要实验实测确认。
测试原理
在实际的控制系统中,电源或放大器等设备通常工作在闭环条件下,即存在反馈环路,测试伯德图通常使用环路注入法。环路注入法可以在不破坏原有反馈环路的情况下,通过在反馈环路中注入一个小信号,模拟系统在实际工作条件下的行为,直接测量系统的开环增益和相位响应,而这是评估系统稳定性的关键参数。好处包括以下几点:
-
模拟实际工作条件:在实际的控制系统中,电源或放大器等设备通常工作在闭环条件下,即存在反馈环路。环路注入法可以在不破坏原有反馈环路的情况下,模拟系统在实际工作条件下的行为。
-
直接测量开环响应:通过在反馈环路中注入一个小信号,可以直接测量系统的开环增益和相位响应。
-
避免系统干扰:使用注入法可以在不引入额外干扰的情况下测试系统。
-
提高测量精度:环路注入法允许在系统的自然工作点附近进行测试,可以减少由于测试条件变化带来的测量误差。
-
易于实现和自动化:现代的测试设备(如示波器和环路分析仪)可以方便地进行频率扫描和数据记录。
-
适用于多种系统:环路注入法不仅适用于电源系统,还可以用于测试各种具有反馈控制的系统。
使用路注入法的基本步骤:
-
开环增益:首先确定系统的开环增益,即在没有反馈的情况下,输入到输出的增益。
-
环路注入点:在系统的某个点注入一个测试信号。这个点通常是反馈环路的断开点,即在反馈信号加入到系统之前。
-
注入信号:注入一个小的测试信号(通常是正弦波),并观察系统对这个信号的响应。
-
测量响应:测量系统对这个测试信号的响应,包括幅值和相位。
-
分析稳定性:通过测量的幅值和相位,可以分析系统的稳定性。如果测试信号的幅值在所有频率下都小于1(或0dB),并且相位在所有频率下都保持正值,则系统是稳定的。
-
计算增益裕度和相位裕度:增益裕度是指在1倍环路增益处,测试信号的幅值与1之间的差值。相位裕度是指在增益为1倍环路增益时,相位与-180度之间的差值。
-
调整设计:如果系统的稳定性或性能不满足要求,可以通过调整控制器参数或系统设计来改善增益裕度和相位裕度。
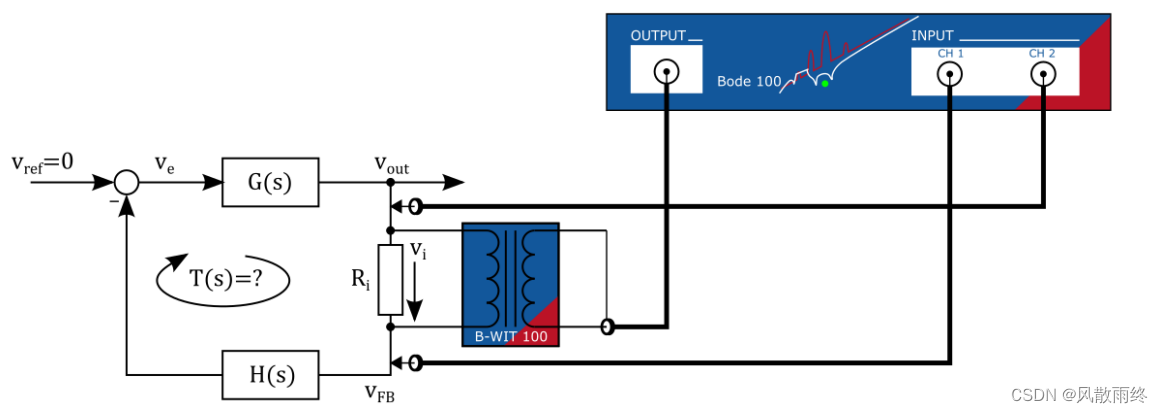
仪器使用环路注入法连接测试一个反馈系统伯德图的方法如下:

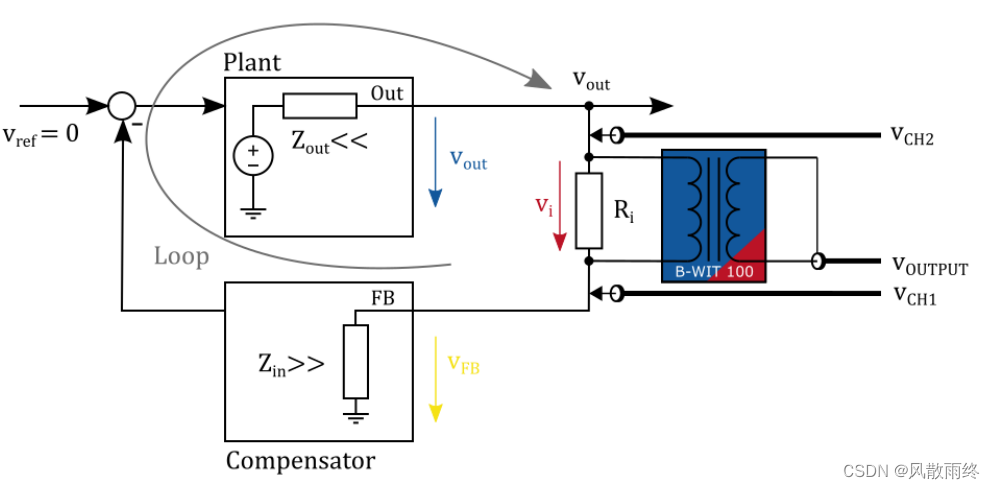
如图所示,当使用仪器连接测试电路时,在输出与反馈端接入一个注入电阻,并连接变压器和一起,仪器通过隔离器输出一个扰动信号,仪器通过CH1获取系统的的输入信号,经过反馈回路以及控制回路到输出端,通过CH2获取输出信号,经过两个信号比较获取系统的开环增益T(s)以及相位差。
注入电阻的作用是提供一个点,使得可以在不干扰系统正常工作的情况下,向系统的反馈环路中注入一个小的交流信号。而不会对电路的直流工作点造成影响。通过测量插入电阻两端的交流电压,可以计算出环路增益。注入电阻选择合适的插入电阻值,可以限制注入信号的幅度,确保信号足够小,不会对系统的稳定性和性能造成显著影响。注入电阻较小时,注入的信号幅度较大;电阻较大,注入时的信号幅度较小,注入电阻需要远小于该点对地阻抗,常见到的大多数测试系统注入电阻的值一般使用5R或者10R。
隔离器的作用是将隔离注入的交流测试信号与系统的直流工作点,使得注入的交流测试信号不会受到直流偏置的影响,方便适应不同阻抗。
通过CH2的输出电压除以CH1信号的输入电压即可测向对应的增益信号。而通过对比输出信号和输入信号的相位差,得到相平特性。CH2通道测到的信号实际与CH1的输入信号是反向的,原因是输入信号为一个扰动,而输出信号是通过反馈控制以达到输出信号不变的目的。故输入扰动信号对应的输出信号为一个反向信号,这样才能抵消扰动。但需要主要的一下几点:
1. 噪声:由于输入的扰动信号一般较小,故如果系统产生噪声可能会淹没输出,导致输出无法看到相应信号。例如在我测试单向buck电路时,由于开关频率噪声过大,导致输出信号被开关频率锁淹没。
2. 示波器的耦合方式:控制系统期待的输出信号一般为直流信号,而扰动信号为一个正弦交流信号,CH2期待获取信号为CH1对应的响应信号,故获取信号的方式得调整为交流耦合方式。
3. 无源探头一般使用1x即可。
2. 低频:在低频段,扰动信号较小,可能会小于干扰信号,这样带来的结果无法测出稳定的响应。在低频段可以通过适当提高信号幅度来提高信噪比。
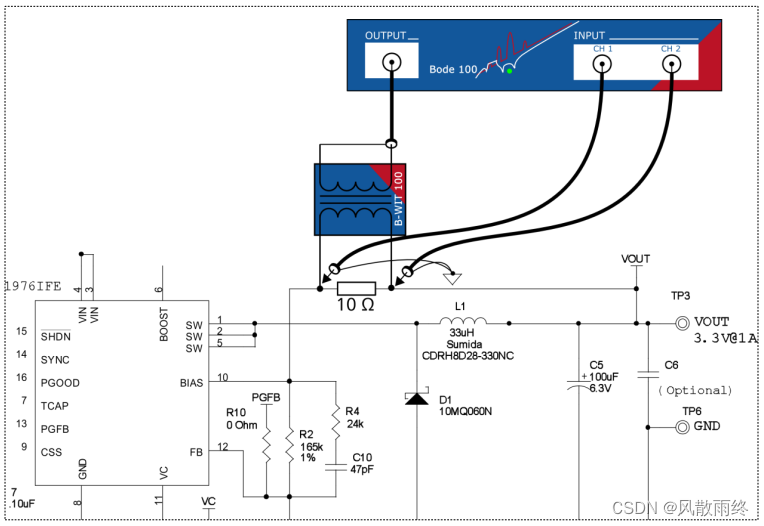
实际使用仪器bode100连接图如下,示波器的连接方式参考对应仪器的使用说明或接线图。注意的是示波器测试的效果相比频响分析仪差一些,频响分析仪的抗干扰能力好很多。
验证测试
LDO开关电源测试
尝试Demo板测试如下,该电源是一个稳压芯片,接线如下。

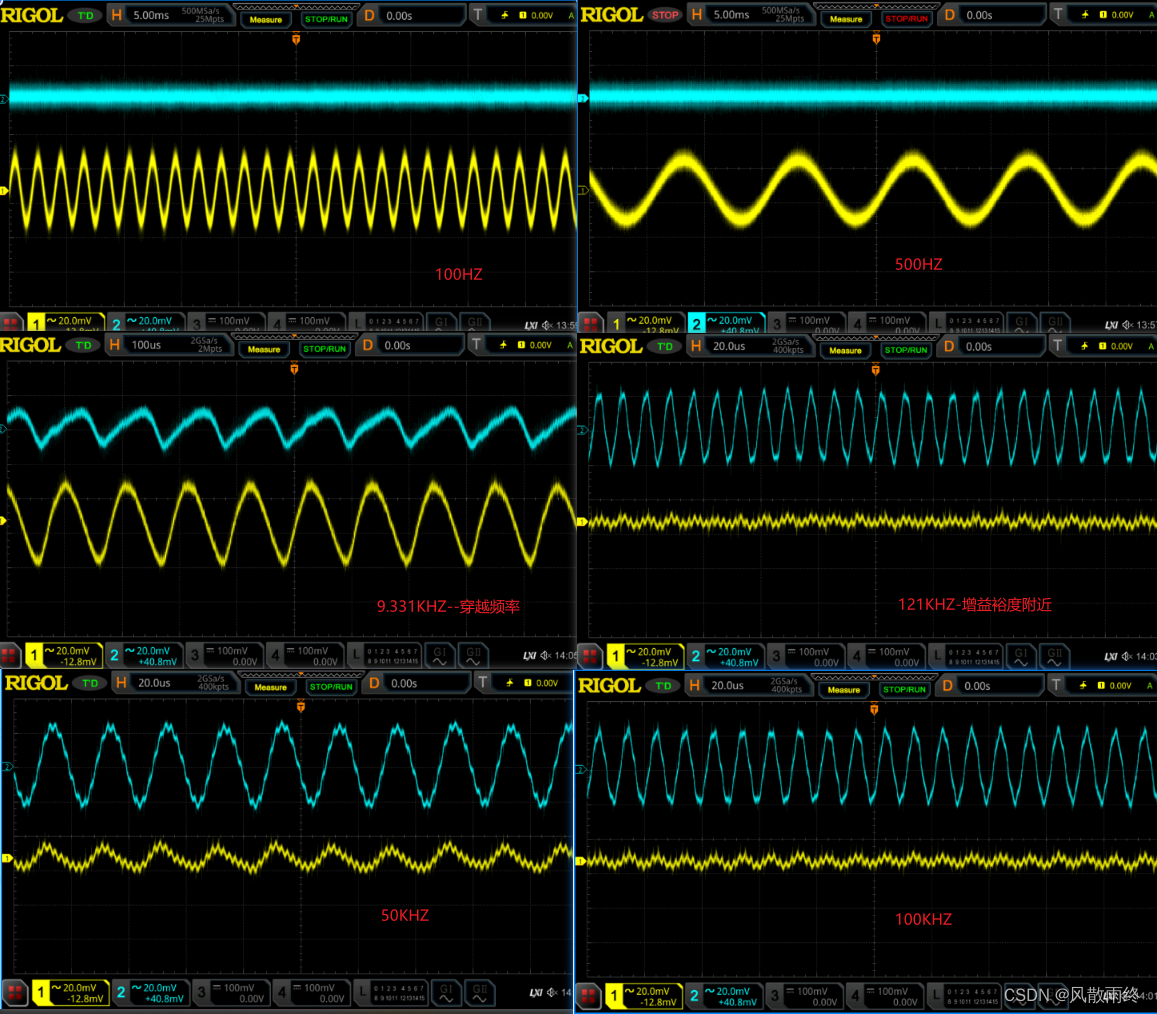
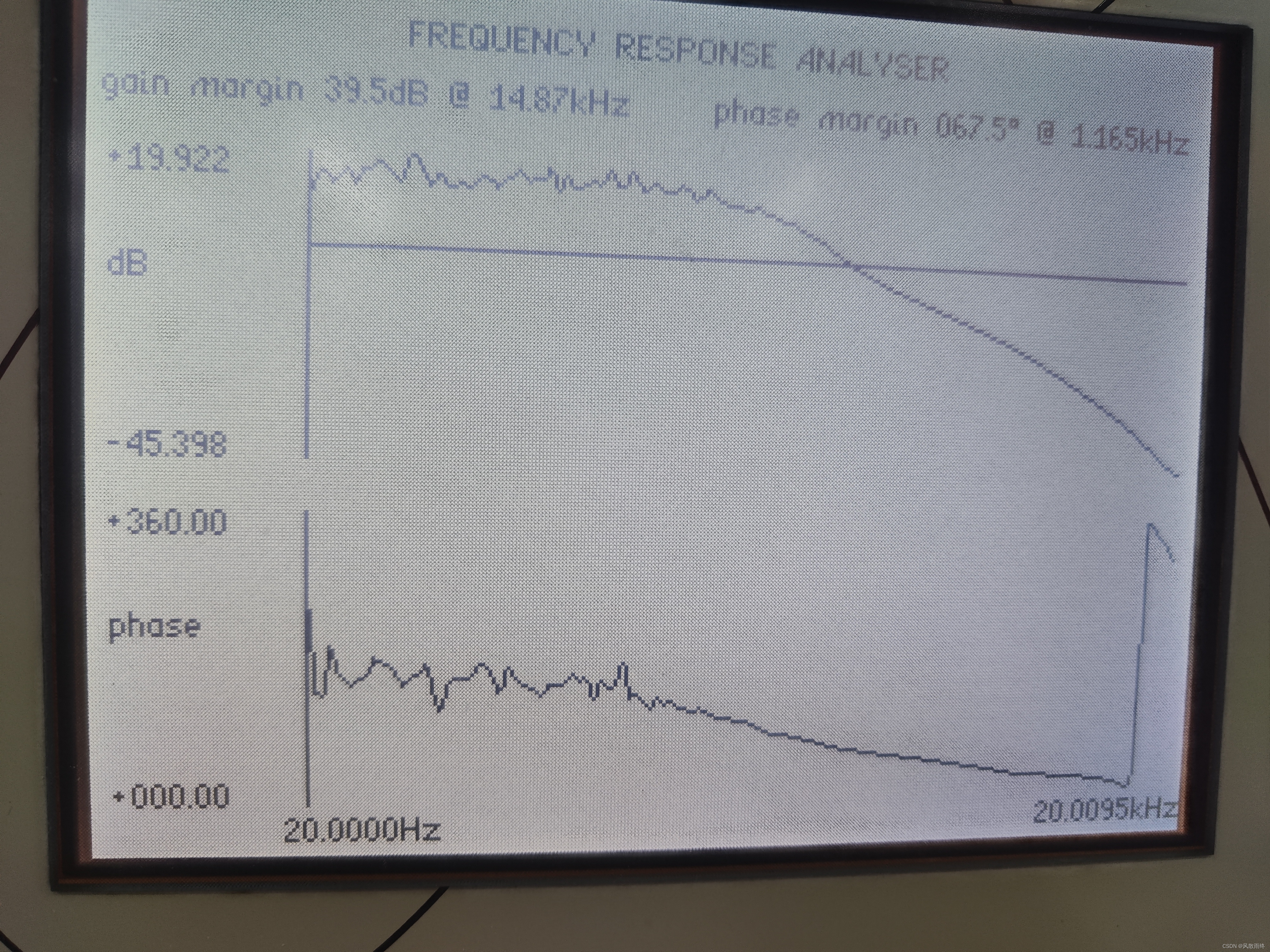
测试bode图如下:
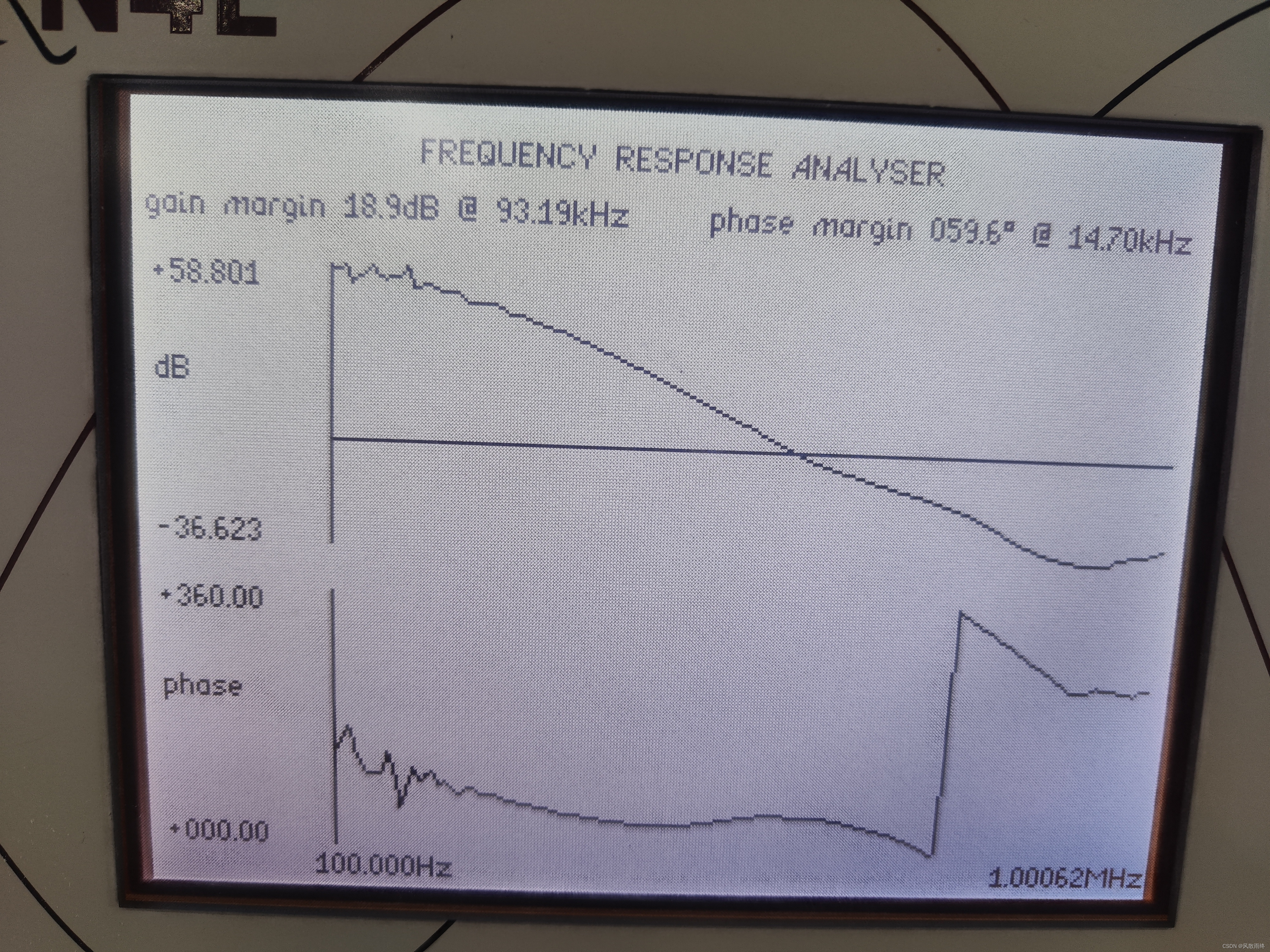
1. 低频下(100HZ~500HZ):该段测试存在问题,由于输入信号较小,输出信号被噪声说淹没,故测试出的信号无法较好解析出相应的输出信号,因此测出的相位不是那么准确。
2. 500hz:相位为78.70°,增益为47.65db
3. 500HZ~123kHZ:正增益段,可以看到随信号频率增加信号逐渐衰减。当增益足够大的,阻扰信号的监测点信号基本为0,可以看到输出对该部分扰动的响应足够好,随频率的增加
4. 123kHz:增益为0db的信号,对应可看到相位裕度。
5. 大于123kHZ:相位达到360°,证明信号延迟达到一个周期。
6. 当环路完全补偿时,输入扰动信号无法测试到波形,当环路无法全补偿时,则看到有一个相应的信号输出。
测试波形如下,说明图中绿色为输入信号,黄色为输出信号。
BUCK测试--Demo板
使用的为一个网购Demo板,负载为仪器负载,这里应该使用电阻效果更好。
噪声干扰问题:开始焊接线为散乱的线,导致看到的信号噪声比较大。在这种存在大电感的电路,电感容易串扰产生大的噪。一方面尽量减小信号回路,声。另一方面焊接线尽量使用绞线的形式,也可以一定程度提高抗干扰能力。
下图为无注入扰动信号时测试波形,此波形为开关频率噪声。开关频率在测试中很难避免,如下图即是输入输出的一个开关频率噪声。

如上述测试原理,连接信号即可测试相应的输出。当然需要一些参数设置:
- 扫频范围:起始和结束频率
- 测试点数:测试频率数量
- 输入和输出:设置信号输入通道和输出通道。计算增益为输出比输入。如果设置反,输入也会变反。
- 耦合方式:交流耦合。测试的为扰动正弦以及补偿曲线,直流偏置无需关心,且容易影响波形观察。
- 输出扰动信号信号幅度:关于扰动信号设置幅度,在控制器能够调整的范围内越大越好。这样能够一定程度上提高信噪比,促使测试的bode图更加平滑,降低硬件噪声的干扰。
测试结果如下:
测试中遇到如下问题:
1. 注入扰动信号(100mV,10K),示波器测试输入和输出发现,输入端有信号,输出端无信号。
- 确认扰动信号是否注入成功,测试T11发现扰动信号过小,调整扰动信号确认T11跟随变化。
- 降低频率发现输出段信号逐渐增大,降到10HZ发现响应正常,确认系统响应带宽过低问题。
- 测试buck电路对负载调整响应时间(即是控制环路稳定时测试跳变的环路响应,排除启动时软件控制逻辑的影响,如软启动),发现响应时间在20ms级别,即是软件控制导致相同响应过慢。
- 通过调整补偿器系数(PI) 提高系统响应速度,然后在通过示波器测试扰动的输入输出,发现正常。即是先前的测试中,由于补偿器设置参数的不合理导致系统增益为负以及相位延迟过大。故响应带宽足够低,测出的图形完全不稳定。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









