







图像的数组表示
1、图像一般使用RGB色彩模式,即每个像素点的颜色由红(R)、绿(G)、蓝(B)组成。
RGB三个颜色通道的变化和叠加得到各种颜色,其中
• R 红色,取值范围,0‐255
• G 绿色,取值范围,0‐255
• B 蓝色,取值范围,0‐255
RGB形成的颜色包括了人类视力所能感知的所有颜色。
PIL, Python Image Library
PIL库是一个具有强大图像处理能力的第三方库
在命令行下的安装方法:
pip install pillow2、图像是一个由像素组成的二维矩阵,每个元素是一个(R,G,B)值。
3、图像是一个三维数组,维度分别是高度、宽度和像素RGB值
from PIL import Image
#Image是PIL库中代表一个图像的类(对象)
import numpy as np
im = np.array(Image.open("F:\PycharmProjects\dog.png"))
print(im.shape, im.dtype) #图像是一个三维数组,维度分别是高度、宽度和像素RGB值
输出结果:
(1920, 1080, 3) uint8
一些概念
图像深度值: > 图像深度是指存储每个像素所用的位数,也用于量度图像的色彩分辨率。 图像梯度: >**梯度**的本意是一个向量(矢量),表示某一函数在该点处的方向导数沿着该方向取得最大值,即函数在该点处沿着该方向(此梯度的方向)变化最快,变化率最大(为该梯度的模)。 >>**图像梯度**可以把图像看成**二维离散函数**,图像梯度其实就是这个二维离散函数的求导: 图像梯度: G(x,y) = dx(i,j) + dy(i,j); dx(i,j) = I(i+1,j) - I(i,j); dy(i,j) = I(i,j+1) - I(i,j); 其中,I是图像像素的值(如:RGB值),(i,j)为像素的坐标。 图像梯度一般也可以用中值差分: dx(i,j) = [I(i+1,j) - I(i-1,j)]/2; dy(i,j) = [I(i,j+1) - I(i,j-1)]/2; 图像边缘一般都是通过对图像进行梯度运算来实现的。 灰度: >灰度使用黑色调表示物体,即用黑色为基准色,不同的饱和度的黑色来显示图像。 每个灰度对象都具有从 0%(白色)到100%(黑色)的亮度值。
图像的手绘效果实现 1、手绘效果的几个特征: • 黑白灰色 • 边界线条较重 • 相同或相近色彩趋于白色 • 略有光源效果 2、利用像素之间的梯度值和虚拟深度值对图像进行重构,根据灰度变化来模拟人类视觉的远近程度 3、考虑光源效果,根据灰度变化来模拟人类视觉的远近程度 • 设计一个位于图像斜上方的虚拟光源 • 光源相对于图像的俯视角为Elevation,方位角为Azimuth • 建立光源对个点梯度值的影响函数 • 运算出各点的新像素值 如图 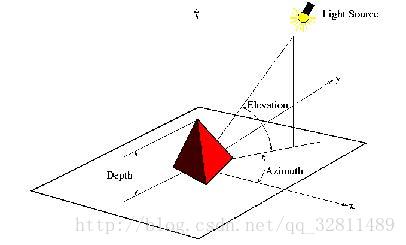 4、实现代码
from PIL import Image
#image 是 PIL库中代表一个图像的类
import numpy as np
#打开一张图片 “F:\PycharmProjects\cui.jpg” 是图片位置
a = np.asarray(Image.open('F:\PycharmProjects\cui.jpg')
.convert('L')).astype('float')
depth = 10. #浮点数,预设深度值为10
grad = np.gradient(a) #取图像灰度的梯度值
grad_x,grad_y = grad #分别取横纵图像的梯度值
grad_x = grad_x*depth/100. #根据深度调整 x 和 y 方向的梯度值
grad_y = grad_y*depth/100.
A = np.sqrt(grad_x**2 + grad_y**2 +1.) #构造x和y轴梯度的三维归一化单位坐标系
uni_x = grad_x/A
uni_y = grad_y/A
uni_z = 1./A
vec_el = np.pi/2.2 #光源的俯视角度,弧度值
vec_az = np.pi/4. #光源的方位角度,弧度值
dx = np.cos(vec_el)*np.cos(vec_az) #光源对 x 轴的影响,np.cos(vec_el)为单位光线在地平面上的投影长度
dy = np.cos(vec_el)*np.sin(vec_az) #光源对 y 轴的影响
dz = np.sin(vec_el) #光源对 z 轴的影响
b = 255*(dx*uni_x + dy*uni_y + dz*uni_z) #梯度与光源相互作用,将梯度转化为灰度
b = b.clip(0,255) #为避免数据越界,将生成的灰度值裁剪至0‐255区间
im = Image.fromarray(b.astype('uint8')) #重构图像
im.save("F:\PycharmProjects\cui1.jpg") #保存图片的地址
解释:
上述的代码中,牵扯到较多函数的调用,对于函数的解释可以参考 python 官网手册。
手绘效果图:

















 125
125

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









