







CPU高速缓存,缓存一致性协议 与 JMM
CPU高速缓存
- CPU为何要有高速缓存
- cpu运行的速度远远高于磁盘 IO的速度,所以人们为了再磁盘io处理完成之前,不让cpu等待,让其尽可能的执行更多的命令,所以用了cpu高速缓存。(解决I\O速度和CPU运算速度之间的不匹配问题)
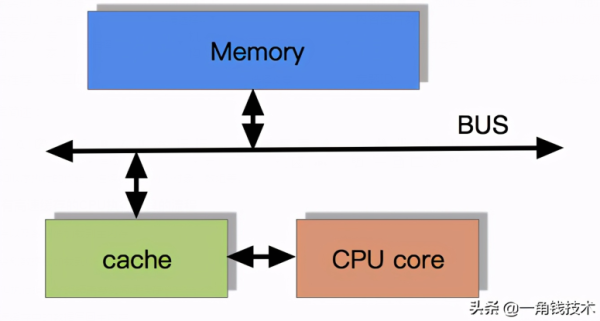
- 带有高速缓存的CPU执行计算的流程
- 程序以及数据被加载到主内存
- 指令和数据被加载到CPU的高速缓存
- CPU执行指令,把结果写到高速缓存
- 高速缓存中的数据写回主内存
目前流行的多级缓存结构
由于CPU的运算速度超越了1级缓存的数据I/O能力,CPU厂商又引入了多级的缓存结构老的CPU会有两级内存(L1和L2),新的CPU会有三级内存(L1,L2,L3 ),如下图所示:
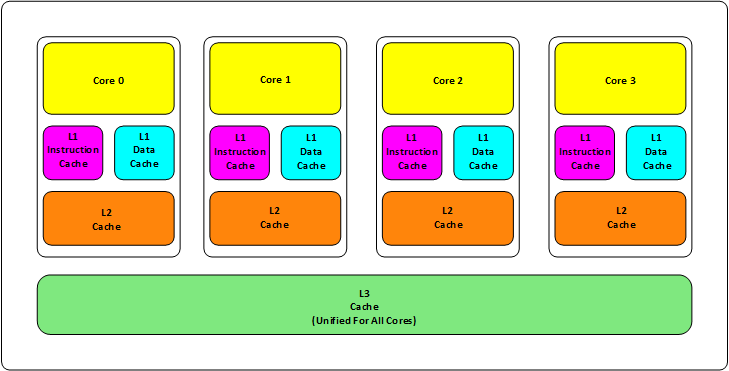
其中:
- L1缓存分成两种,一种是指令缓存,一种是数据缓存。L2缓存和L3缓存部分指令和数据。
- L1和L2缓存在每一个CPU核中,L3则是所有CPU核心共享的内存。
- L1、L2、L3的越离CPU近就越小,速度也越快,越离CPU远,速度也越慢
再往后面就是内存,内存的后面就是硬盘。我们来看一些他们的速度
- L1 的存取速度:4 个CPU时钟周期
- L2 的存取速度: 11 个CPU时钟周期
- L3 的存取速度:39 个CPU时钟周期
- RAM内存的存取速度:107 个CPU时钟周期
我们可以看到,L1的速度是RAM的27倍,但是L1/L2的大小基本上也就是KB级别的,L3会是MB级别的。例如:Intel Core i7-8700K ,是一个6核的CPU,每核上的L1是64KB(数据和指令各32KB),L2 是 256K,L3有2MB
我们的数据就从内存向上,先到L3,再到L2,再到L1,最后到寄存器进行CPU计算。为什么会设计成三层?这里有下面几个方面的考虑:
- 一个方面是物理速度,如果要更大的容量就需要更多的晶体管,除了芯片的体积会变大,更重要的是大量的晶体管会导致速度下降,因为访问速度和要访问的晶体管所在的位置成反比,也就是当信号路径变长时,通信速度会变慢。这部分是物理问题。
- 另外一个问题是,多核技术中,数据的状态需要在多个CPU中进行同步,并且,我们可以看到,cache和RAM的速度差距太大,所以,多级不同尺寸的缓存有利于提高整体的性能。
建立这么多级的缓存,一定就会引入其它的问题,这里有两个比较重要的问题,
- 一个是比较简单的缓存的命中率的问题。
- 另一个是比较复杂的缓存更新的一致性问题。
缓存的命中
缓存基本上来说就是把后面的数据加载到离自己近的地方,对于CPU来说,它是不会一个字节一个字节的加载的,因为这非常没有效率,一般来说都是要一块一块的加载的,对于这样的一块一块的数据单位,术语叫“Cache Line”,一般来说,一个主流的CPU的Cache Line 是 64 Bytes(也有的CPU用32Bytes和128Bytes),64Bytes也就是16个32位的整型,这就是CPU从内存中捞数据上来的最小数据单位
比如:Cache Line是最小单位(64Bytes),所以先把Cache分布多个Cache Line,比如:L1有32KB,那么,32KB/64B = 512 个 Cache Line
一方面,缓存需要把内存里的数据放到放进来,英文叫 CPU Associativity。Cache的数据放置的策略决定了内存中的数据块会拷贝到CPU Cache中的哪个位置上,因为Cache的大小远远小于内存,所以,需要有一种地址关联的算法,能够让内存中的数据可以被映射到Cache中来。这个有点像内存地址从逻辑地址向物理地址映射的方法,但不完全一样。
基本上来说,我们会有如下的一些方法。
- 一种方法是,任何一个内存地址的数据可以被缓存在任何一个Cache Line里,这种方法是最灵活的,但是,如果我们要知道一个内存是否存在于Cache中,我们就需要进行O(n)复杂度的Cache遍历,这是很没有效率的。
- 另一种方法,为了降低缓存搜索算法,我们需要使用像Hash Table这样的数据结构,最简单的hash table就是做“求模运算”,比如:我们的L1 Cache有512个Cache Line,那么,公式:
(内存地址 mod 512)* 64就可以直接找到所在的Cache地址的偏移了。但是,这样的方式需要我们的程序对内存地址的访问要非常地平均,不然冲突就会非常严重。这成了一种非常理想的情况了。 - 为了避免上述的两种方案的问题,于是就要容忍一定的hash冲突,也就出现了 N-Way 关联。也就是把连续的N个Cache Line绑成一组,然后,先把找到相关的组,然后再在这个组内找到相关的Cache Line。这叫 Set Associativity。如下图所示。

对于 N-Way 组关联,可能有点不好理解,这里个例子,并多说一些细节(不然后面的代码你会不能理解),Intel 大多数处理器的L1 Cache都是32KB,8-Way 组相联,Cache Line 是64 Bytes。这意味着,
- 32KB的可以分成,32KB / 64 = 512 条 Cache Line。
- 因为有8 Way,于是会每一Way 有 512 / 8 = 64 条 Cache Line。
- 于是每一路就有 64 x 64 = 4096 Byts 的内存。
为了方便索引内存地址,
- Tag:每条 Cache Line 前都会有一个独立分配的 24 bits来存的 tag,其就是内存地址的前24bits
- Index:内存地址后续的6个bits则是在这一Way的是Cache Line 索引,2^6 = 64 刚好可以索引64条Cache Line
- Offset:再往后的6bits用于表示在Cache Line 里的偏移量
当拿到一个内存地址的时候,先拿出中间的 6bits 来,找到是哪组。

然后,在这一个8组的cache line中,再进行O(n) n=8 的遍历,主是要匹配前24bits的tag。如果匹配中了,就算命中,如果没有匹配到,那就是cache miss,如果是读操作,就需要进向后面的缓存进行访问了。L2/L3同样是这样的算法。而淘汰算法有两种,一种是随机一种是LRU。现在一般都是以LRU的算法(通过增加一个访问计数器来实现)

这也意味着:
- L1 Cache 可映射 36bits 的内存地址,一共 2^36 = 64GB的内存
- 当CPU要访问一个内存的时候,通过这个内存中间的6bits 定位是哪个set,通过前 24bits 定位相应的Cache Line。
- 就像一个hash Table的数据结构一样,先是O(1)的索引,然后进入冲突搜索。
- 因为中间的 6bits 决定了一个同一个set,所以,对于一段连续的内存来说,每隔4096的内存会被放在同一个组内,导致缓存冲突。
此外,当有数据没有命中缓存的时候,CPU就会以最小为Cache Line的单元向内存更新数据。当然,CPU并不一定只是更新64Bytes,因为访问主存实在是太慢了,所以,一般都会多更新一些。好的CPU会有一些预测的技术,如果找到一种pattern的话,就会预先加载更多的内存,包括指令也可以预加载。
缓存的一致性
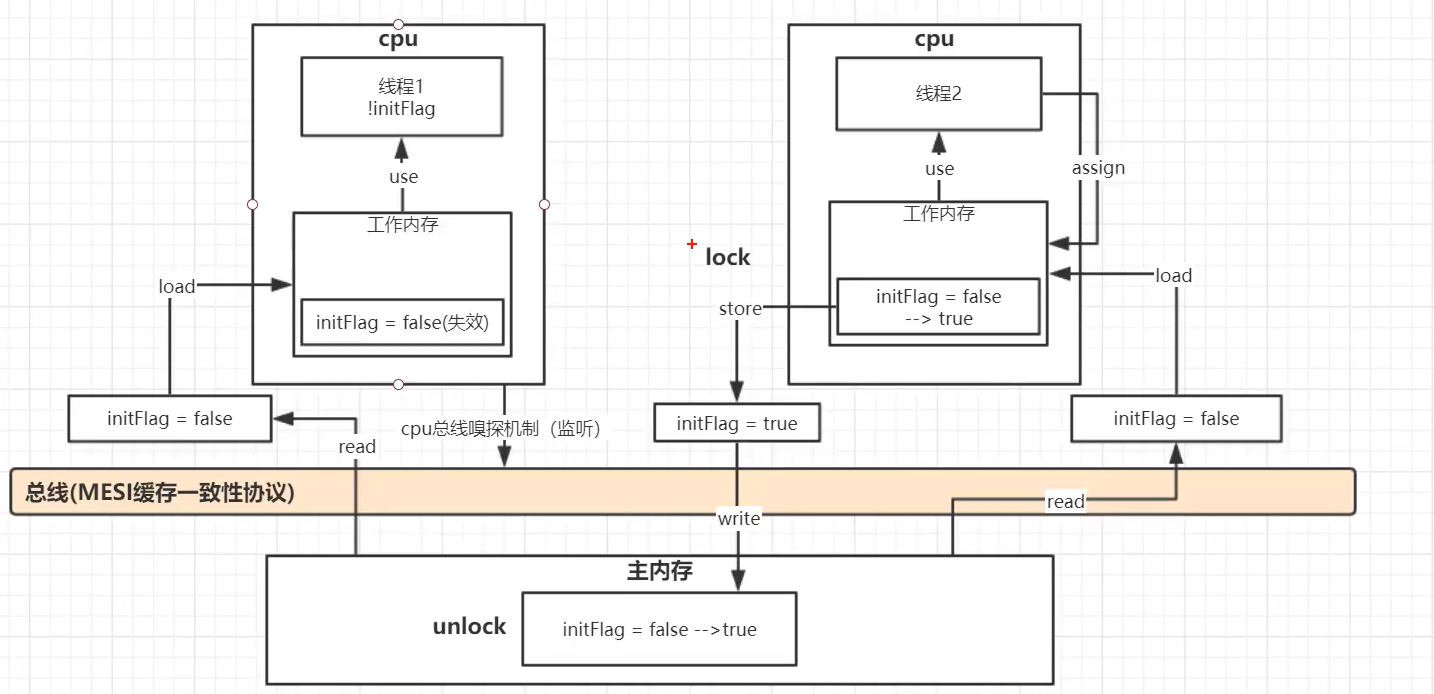
cpu工作与缓存一致性协议流程图:
对于主流的CPU来说,缓存的写操作基本上是两种策略
- 一种是Write Back,写操作只要在cache上,然后再flush到内存上。
- 一种是Write Through,写操作同时写到cache和内存上
如果有一个数据 x 在 CPU 第0核的缓存上被更新了,那么其它CPU核上对于这个数据 x 的值也要被更新,这就是缓存一致性的问题
一般来说,在CPU硬件上,会有两种方法来解决这个问题
Directory 协议:
这种方法的典型实现是要设计一个集中式控制器,它是主存储器控制器的一部分。其中有一个目录存储在主存储器中,其中包含有关各种本地缓存内容的全局状态信息。当单个CPU Cache 发出读写请求时,这个集中式控制器会检查并发出必要的命令,以在主存和CPU Cache之间或在CPU Cache自身之间进行数据同步和传输
Snoopy 协议:
这种协议更像是一种数据通知的总线型的技术。CPU Cache通过这个协议可以识别其它Cache上的数据状态。如果有数据共享的话,可以通过广播机制将共享数据的状态通知给其它CPU Cache。这个协议要求每个CPU Cache 都可以“窥探”数据事件的通知并做出相应的反应。如下图所示,有一个Snoopy Bus的总线。
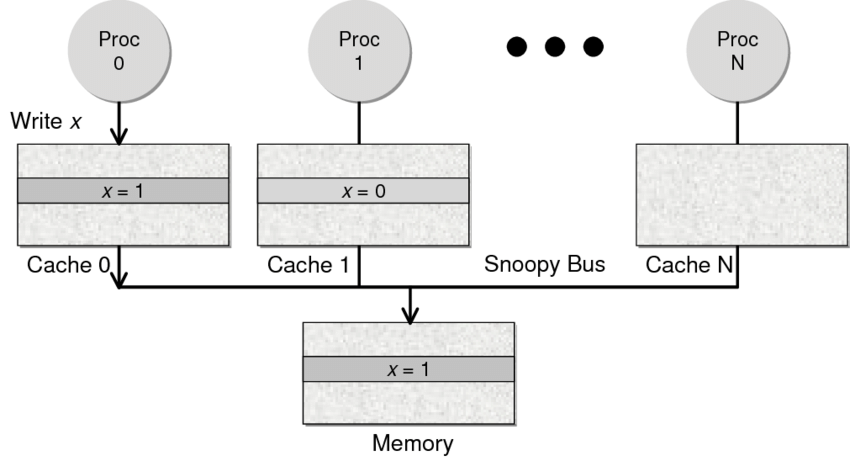
因为Directory协议是一个中心式的,会有性能瓶颈,而且会增加整体设计的复杂度。而Snoopy协议更像是微服务+消息通讯
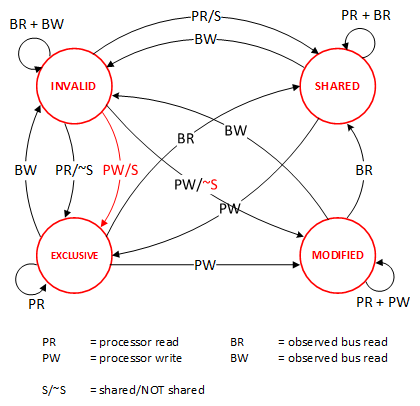
MESI 协议
MESI 是指4个状态的首字母。每个 Cache line 有4个状态,可用2个bit表示,它们分别是:
缓存行(Cache line):缓存存储数据的单元

注意:对于M 和 E 状态而言是精确的,它们在和该缓存行的真正状态是一致的,而 S 状态可能是非一致的。
如果一个缓存将处于S状态的缓存行作废了,而另一个缓存实际上可能已经独享了该缓存行,但是该缓存却不会将缓存行升迁为E状态,这是因为其他缓存不会广播它们作废掉该缓存行的通知,同样由于缓存并没有保存该缓存行的copy数量,因此(即使有这种通知)也没有办法确定自己是否已经独享了该缓存行。
从上面的意义来看 E状态 是一种投机性的优化:如果一个CPU想修改一个处于 S状态 的缓存行,总线事物需要将所有该缓存行的 copy 变成 invalid 状态,而修改 E状态 的缓存不需要使用总线事物。
这些状态的状态机如下所示
下面是个示例
| 当前操作 | CPU0 | CPU1 | Memory | 说明 |
| 1) CPU0 read(x) | x=1 (E) | x=1 | 只有一个CPU有 x 变量, 所以,状态是 Exclusive | |
| 2) CPU1 read(x) | x=1 (S) | x=1(S) | x=1 | 有两个CPU都读取 x 变量, 所以状态变成 Shared |
| 3) CPU0 write(x,9) | x=9 (M) | x=1(I) | x=1 | 变量改变,在CPU0中状态 变成 Modified,在CPU1中 状态变成 Invalid |
| 4) 变量 x 写回内存 | x=9 (M) | X=1(I) | x=9 | 目前的状态不变 |
| 5) CPU1 read(x) | x=9 (S) | x=9(S) | x=9 | 变量同步到所有的Cache中, 状态回到Shared |
MESI 这种协议在数据更新后,会标记其它共享的CPU缓存的数据拷贝为Invalid状态,然后当其它CPU再次read的时候,就会出现 cache miss 的问题,此时再从内存中更新数据。从内存中更新数据意味着20倍速度的降低。我们能不能直接从我隔壁的CPU缓存中更新?是的,这就可以增加很多速度了,但是状态控制也就变麻烦了。还需要多来一个状态:Owner(宿主),用于标记,我是更新数据的源。于是,出现了 MOESI 协议
MOESI协议允许 CPU Cache 间同步数据,于是也降低了对内存的操作,性能是非常大的提升。
与 MOESI 协议类似的一个协议是 MESIF,其中的 F 是 Forward,同样是把更新过的数据转发给别的 CPU Cache 但是,MOESI 中的 Owner 状态 和MESIF 中的 Forward 状态有一个非常大的不一样—— Owner状态下的数据是dirty的,还没有写回内存,Forward状态下的数据是clean的,可以丢弃而不用另行通知
JMM内存模型介绍
《Java虚拟机规范》中曾试图定义一种“Java内存模型”(Java Memory Model简称JMM)来屏蔽各种硬件和操作系统的内存访问差异,以实现让Java程序在各种平台下都能达到一致的内存访问效果。Java内存模型是一种抽象的概念,并不真实存在,它描述的是一组规则或规范,通过这组规范定义了程序中各个变量(包括实例字段,静态字段和构成数组对象的元素)的访问方式。JMM是围绕原子性,有序性、可见性展开。
主内存与工作内存
Java内存模型的主要目的是定义程序中各种变量的访问规则,即关注在虚拟机中把变量值存储到内存和从内存中取出变量值这样的底层细节。此处的变量(Variables)与Java编程中所说的变量有所区别,它包括了实例字段、静态字段和构成数组对象的元素,但是不包括局部变量与方法参数,因为后者是线程私有的,不会被共享,自然就不会存在竞争问题。
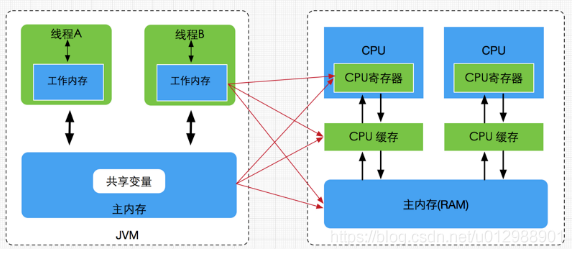
Java内存模型规定了所有的变量都存储在主内存(Main Memory)中(此处的主内存与介绍物理硬件时提到的主内存名字一样,两者也可以类比,但物理上它仅是虚拟机内存的一部分)。JVM运行程序的实体是线程,而每个线程创建时JVM都会为其创建一个工作内存(Working Memory,可与前面讲的处理器高速缓存类比),用于存储线程私有的数据,线程的工作内存中保存了被该线程使用的变量的主内存副本,线程对变量的所有操作(读取、赋值等)都必须在工作内存中进行,而不能直接读写主内存中的数据。不同的线程之间也无法直接访问对方工作内存中的变量,线程间变量值的传递均需要通过主内存来完成,线程、主内存、工作内存三者的交互关系如下图。

Java内存模型与硬件内存架构的关系
通过对前面的硬件内存架构、Java内存模型以及Java多线程的实现原理的了解,我们应该已经意识到,多线程的执行最终都会映射到硬件处理器上进行执行,但Java内存模型和硬件内存架构并不完全一致。对于硬件内存来说只有寄存器、缓存内存、主内存的概念,并没有工作内存(线程私有数据区域)和主内存(堆内存)之分,也就是说Java内存模型对内存的划分对硬件内存并没有任何影响,因为JMM只是一种抽象的概念,是一组规则,并不实际存在,不管是工作内存的数据还是主内存的数据,对于计算机硬件来说都会存储在计算机主内存中,当然也有可能存储到CPU缓存或者寄存器中,因此总体上来说,Java内存模型和计算机硬件内存架构是一个相互交叉的关系,是一种抽象概念划分与真实物理硬件的交叉。(注意对于Java内存区域划分也是同样的道理)
JMM-内存间交互的八种操作
关于主内存与工作内存之间具体的交互协议,即一个变量如何从主内存拷贝到工作内存、如何从工作内存同步回主内存这一类的实现细节,Java内存模型中定义了以下8种操作来完成。Java虚拟机实现时必须保证下面提及的每一种操作都是原子的、不可再分的(对于double和long类型的变量来说,load、store、read和write操作在某些平台上允许有例外)。
- lock(锁定):作用于主内存的变量,它把一个变量标识为一条线程独占的状态。
- unlock(解锁):作用于主内存的变量,它把一个处于锁定状态的变量释放出来,释放后的变量才可以被其他线程锁定。
- read(读取):作用于主内存的变量,它把一个变量的值从主内存传输到线程的工作内存中,以便随后的load动作使用。
- load(载入):作用于工作内存的变量,它把read操作从主内存中得到的变量值放入工作内存的变量副本中。
- use(使用):作用于工作内存的变量,它把工作内存中一个变量的值传递给执行引擎,每当虚拟机遇到一个需要使用变量的值的字节码指令时将会执行这个操作。
- assign(赋值):作用于工作内存的变量,它把一个从执行引擎接收的值赋给工作内存的变量,每当虚拟机遇到一个给变量赋值的字节码指令时执行这个操作。
- store(存储):作用于工作内存的变量,它把工作内存中一个变量的值传送到主内存中,以便随后的write操作使用。
- write(写入):作用于主内存的变量,它把store操作从工作内存中得到的变量的值放入主内存的变量中。
如果要把一个变量从主内存拷贝到工作内存,那就要按顺序执行read和load操作,如果要把变量从工作内存同步回主内存,就要按顺序执行store和write操作。注意,Java内存模型只要求上述两个操作必须按顺序执行,但不要求是连续执行。也就是说read与load之间、store与write之间是可插入其他指令的,如对主内存中的变量a、b进行访问时,一种可能出现的顺序是read a、read b、load b、load a。

除此之外,Java内存模型还规定了在执行上述8种基本操作时必须满足如下规则:
- 不允许read和load、store和write操作之一单独出现,即不允许一个变量从主内存读取了但工作内存不接受,或者工作内存发起回写了但主内存不接受的情况出现。
- 不允许一个线程丢弃它最近的assign操作,即变量在工作内存中改变了之后必须把该变化同步回主内存。
- 不允许一个线程无原因地(没有发生过任何assign操作)把数据从线程的工作内存同步回主内存中。
- 一个新的变量只能在主内存中“诞生”,不允许在工作内存中直接使用一个未被初始化(load或assign)的变量,换句话说就是对一个变量实施use、store操作之前,必须先执行assign和load操作。
- 一个变量在同一个时刻只允许一条线程对其进行lock操作,但lock操作可以被同一条线程重复执行多次,多次执行lock后,只有执行相同次数的unlock操作,变量才会被解锁。
- 如果对一个变量执行lock操作,那将会清空工作内存中此变量的值,在执行引擎使用这个变量前,需要重新执行load或assign操作以初始化变量的值。
- 如果一个变量事先没有被lock操作锁定,那就不允许对它执行unlock操作,也不允许去unlock一个被其他线程锁定的变量。
- 对一个变量执行unlock操作之前,必须先把此变量同步回主内存中(执行store、write操作)。
由Java内存模型来直接保证的原子性变量操作包括read、load、assign、use、store和write这六个,我们大致可以认为,基本数据类型的访问、读写都是具备原子性的(例外就是long和double的非原子性协定)
Java内存模型带来的问题
可见性问题

左边CPU中运行的线程从主存中拷贝共享对象obj到它的CPU缓存,把对象obj的count变量改为2。但这个变更对运行在右边CPU中的线程不可见,因为这个更改还没有flush到主存中
在多线程的环境下,如果某个线程首次读取共享变量,则首先到主内存中获取该变量,然后存入工作内存中,以后只需要在工作内存中读取该变量即可。同样如果对该变量执行了修改的操作,则先将新值写入工作内存中,然后再刷新至主内存中。但是什么时候最新的值会被刷新至主内存中是不太确定,一般来说会很快,但具体时间不知
要解决共享对象可见性这个问题,我们可以使用volatile关键字或者是加锁
竞争问题
线程A和线程B共享一个对象obj。假设线程A从主存读取Obj.count变量到自己的CPU缓存,同时,线程B也读取了Obj.count变量到它的CPU缓存,并且这两个线程都对Obj.count做了加1操作。此时,Obj.count加1操作被执行了两次,不过都在不同的CPU缓存中

如果这两个加1操作是串行执行的,那么Obj.count变量便会在原始值上加2,最终主存中的Obj.count的值会是3。然而图中两个加1操作是并行的,不管是线程A还是线程B先flush计算结果到主存,最终主存中的Obj.count只会增加1次变成2,尽管一共有两次加1操作
重排序
重排序类型
除了共享内存和工作内存带来的问题,还存在重排序的问题:在执行程序时,为了提高性能,编译器和处理器常常会对指令做重排序。重排序分3种类型
1)编译器优化的重排序:编译器在不改变单线程程序语义的前提下,可以重新安排语句的执行顺序。
2)指令级并行的重排序:现代处理器采用了指令级并行技术(Instruction-LevelParallelism,ILP)来将多条指令重叠执行。如果不存在数据依赖性,处理器可以改变语句对应机器指令的执行顺序。
3)内存系统的重排序:由于处理器使用缓存和读/写缓冲区,这使得加载和存储操作看上去可能是在乱序执行。
as-if-serial
as-if-serial语义的意思是:不管怎么重排序(编译器和处理器为了提高并行度,(单线程)程序的执行结果不能被改变。编译器、runtime和处理器都必须遵守as-if-serial语义
内存屏障
Java编译器在生成指令序列的适当位置会插入内存屏障指令来禁止特定类型的处理器重排序,从而让程序按我们预想的流程去执行。
1、保证特定操作的执行顺序
2、影响某些数据(或则是某条指令的执行结果)的内存可见性
编译器和CPU能够重排序指令,保证最终相同的结果,尝试优化性能。插入一条Memory Barrier会告诉编译器和CPU:不管什么指令都不能和这条Memory Barrier指令重排序
Memory Barrier所做的另外一件事是强制刷出各种CPU cache,如一个Write-Barrier(写入屏障)将刷出所有在Barrier之前写入 cache 的数据,因此,任何CPU上的线程都能读取到这些数据的最新版本。
内存屏障底层分为读屏障和写屏障,JMM又对读写屏障做了各种组合,分为了Loadload、Storestore、LoadStore、StoreLoad
happens-before
happens-before是JVM规定重排序必须遵守的规则
Happens-Before规则
JMM为我们提供了以下的Happens-Before规则:
1)程序顺序规则:一个线程中的每个操作,happens-before于该线程中的任意后续操作
2)监视器锁规则:对一个锁的解锁,happens-before于随后对这个锁的加锁
3)volatile变量规则:对一个volatile域的写,happens-before于任意后续对这个volatile域的读
4)传递性:如果A happens-before B,且B happens-before C,那么A happens-before C
5)start()规则:如果线程A执行操作ThreadB.start()(启动线程B),那么A线程的ThreadB.start()操作happens-before于线程B中的任意操作
6)join()规则:如果线程A执行操作ThreadB.join()并成功返回,那么线程B中的任意操作happens-before于线程A从ThreadB.join()操作成功返回
7 )线程中断规则:对线程interrupt方法的调用happens-before于被中断线程的代码检测到中断事件的发生
JMM-内存间交互的八种操作
volatile详解
volatile的内存语义
- 通过缓存一致性协议保证变量的线程间可见性
- 通过内存中的读写屏障避免指令重排序
volatile的内存屏障
在Java中对于volatile修饰的变量,编译器在生成字节码时,会在指令序列中插入内存屏障来禁止特定类型的处理器重排序问题。
volatile写
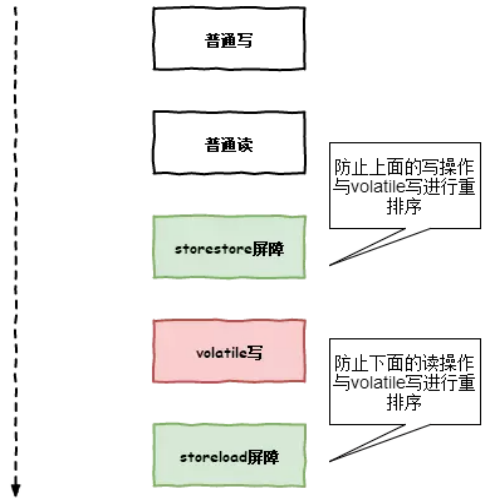
- storestore屏障:对于这样的语句
store1; storestore; store2,在store2及后续写入操作执行前,保证store1的写入操作对其它处理器可见(也就是说如果出现storestore屏障,那么store1指令一定会在store2之前执行,CPU不会store1与store2进行重排序) - storeload屏障:对于这样的语句
store1; storeload; load2,在load2及后续所有读取操作执行前,保证store1的写入对所有处理器可见(也就是说如果出现storeload屏障,那么store1指令一定会在load2之前执行,CPU不会对store1与load2进行重排序)
volatile读
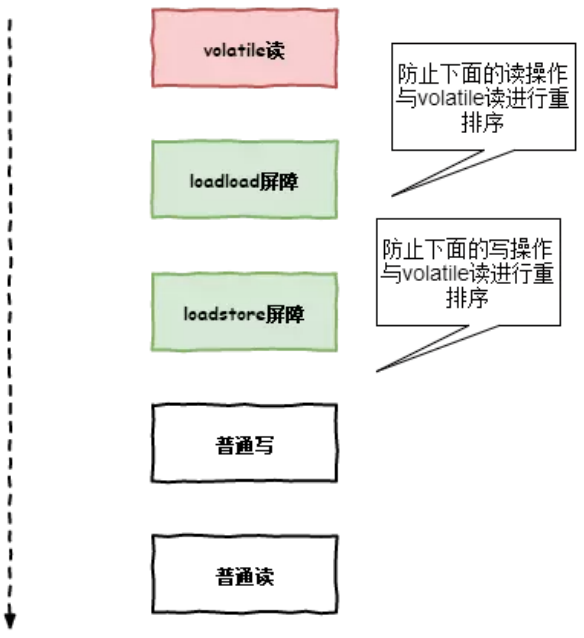
在每个volatile读操作的后面插入一个LoadLoad屏障。在每个volatile读操作的后面插入一个loadstore屏障
- loadload屏障:对于这样的语句load1; loadload; load2,在load2及后续读取操作要读取的数据被访问前,保证load1要读取的数据被读取完毕(也就是说,如果出现loadload屏障,那么load1指令一定会在load2之前执行,CPU不会对load1与load2进行重排序)
- loadstore屏障:对于这样的语句load1; loadstore; store2,在store2及后续写入操作被刷出前,保证load1要读取的数据被读取完毕(也就是说,如果出现loadstore屏障,那么load1指令一定会在store2之前执行,CPU不会对load1与store2进行重排序)
volatile的实现原理
通过unsafe.cpp的lock:前缀,调用系统的总线锁,锁住总线和缓存
既然CPU有缓存一致性协议(MESI),为什么JMM还需要volatile关键字
volatile是java语言层面给出的保证,MSEI协议是多核cpu保证cache一致性的一种方法,中间隔得还很远,我们可以先来做几个假设:
1.回到远古时候,那个时候cpu只有单核,或者是多核但是保证sequence consistency,当然也无所谓有没有MESI协议了。那这个时候,我们需要java语言层面的volatile的支持吗?
当然是需要的,因为在语言层面编译器和虚拟机为了做性能优化,可能会存在指令重排的可能,而volatile给我们提供了一种能力,我们可以告诉编译器,什么可以重排,什么不可以。
2.那好,假设更进一步,假设java语言层面不会对指令做任何的优化重排,那在多核cpu的场景下,我们还需要volatile关键字吗?
答案仍然是需要的。因为 MESI只是保证了多核cpu的独占cache之间的一致性,但是cpu的并不是直接把数据写入L1 cache的,中间还可能有store buffer。有些arm和power架构的cpu还可能有load buffer或者invalid queue等等。因此,有MESI协议远远不够。
3.再接着,让我们再做一个更大胆的假设。假设cpu中这类store buffer/invalid queue等等都不存在了,cpu是数据是直接写入cache的,读取也是直接从cache读的,那还需要volatile关键字吗?
你猜得没错,还需要的。原因就在这个“一致性”上。consistency和coherence都可以被翻译为一致性,但是MSEI协议这里保证的仅仅coherence而不是consistency。那consistency和cohence有什么区别呢?
下面取自wiki的一段话: Coherence deals with maintaining a global order in which writes to a single location or single variable are seen by all processors. Consistency deals with the ordering of operations to multiple locations with respect to all processors.
因此,MESI协议最多只是保证了对于一个变量,在多个核上的读写顺序,对于多个变量而言是没有任何保证的。很遗憾,还是需要volatile~~
4.好的,到了现在这步,我们再来做最后一个假设,假设cpu写cache都是按照指令顺序fifo写的,那现在可以抛弃volatile了吧?你觉得呢?
那肯定不行啊!因为对于arm和power这个weak consistency的架构的cpu来说,它们只会保证指令之间有比如控制依赖,数据依赖,地址依赖等等依赖关系的指令间提交的先后顺序,而对于完全没有依赖关系的指令,比如x=1;y=2,它们是不会保证执行提交的顺序的,除非你使用了volatile,java把volatile编译成arm和power能够识别的barrier指令,这个时候才是按顺序的















 1766
1766











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









