







原文:http://blog.csdn.net/babygoodmorning/article/details/71138158
计算机图形图像实验
一. 图像平滑
图像平滑,主要要用到openCV里的函数cvSmooth,如下
/*
src 原图像
dst 目标图像
smoothtype 平滑类型
CV_BLUR 均值滤波
CV_MEDIAN 中值滤波
CV_GAUSSIAN 高斯滤波
CV_BILATERAL 双向滤波
size1 平滑操作,窗口的宽,必须是奇数
size2 平滑操作,窗口的宽,为0的话和size1大小相等,
sigma1 用于高斯滤波
sigma2 用于双向滤波
*/
cvSmooth(cvArr *src,cvArr *dst, int smoothtype, int size1,int size2, double sigma1,double sigma2)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
1. 均值滤波
IplImage* blurSmooth(IplImage* src, int size) {
IplImage* dst = cvCreateImage(cvSize(src->width, src->height), src->depth, src->nChannels);
cvSmooth(src, dst, CV_BLUR, size, 0, 0, 0);
return dst;
}
- 1
- 2
- 3
- 4
- 5
2. 中值滤波
/*
中值滤波
窗口的增加->图像的损坏加大
*/
IplImage* medianSmooth(IplImage* src, int size) {
IplImage* dst = cvCreateImage(cvSize(src->width, src->height), src->depth, src->nChannels);
cvSmooth(src, dst, CV_MEDIAN, size, 0, 0, 0);
return dst;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
3. 高斯滤波
/*
高斯滤波
抑制服从正态分布的噪声有效
g(x)=exp( -x^2/(2*(sigma^2))
*/
IplImage* gaussianSmooth(IplImage* src,int size) {
IplImage* dst = cvCreateImage(cvSize(src->width, src->height), src->depth, src->nChannels);
cvSmooth(src, dst, CV_GAUSSIAN, size, 0, 0, 0);
return dst;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
4. 实验结果
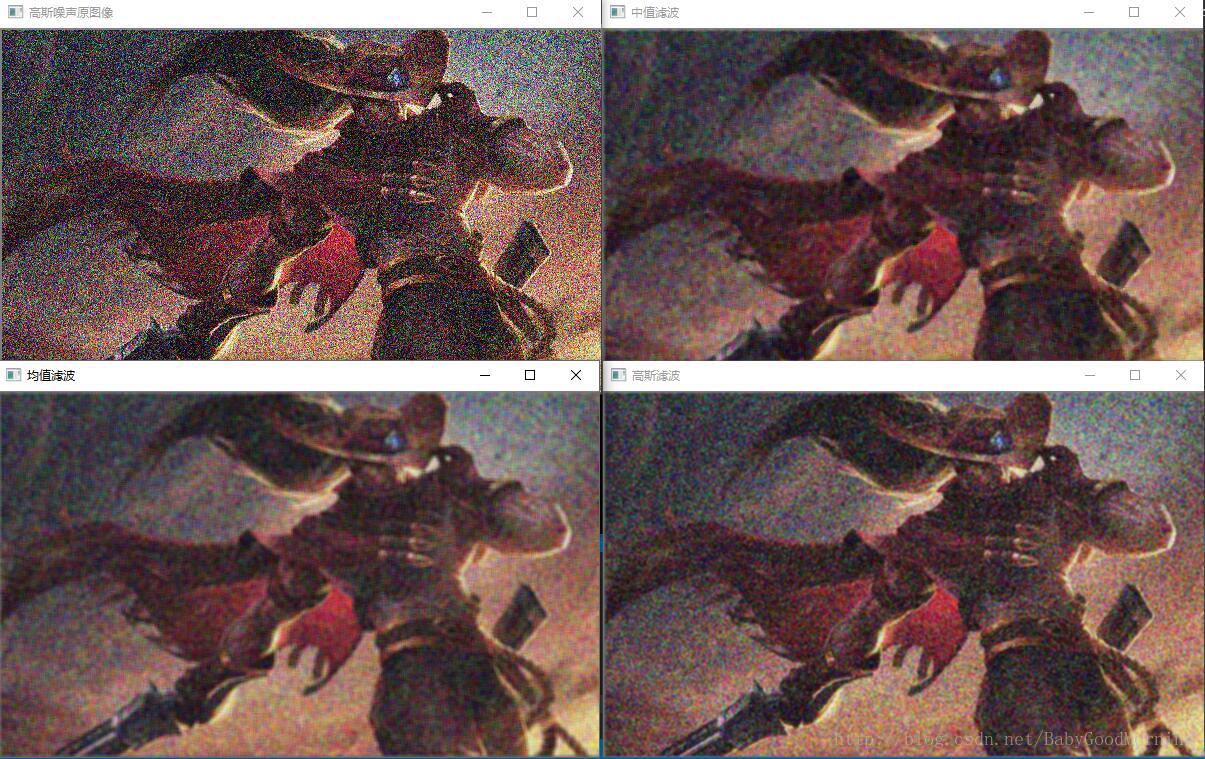
由以上结果可知,高斯滤波对于含有高斯噪声图像的处理结果较好,仔细看会发现要比均值滤波和中值滤波在细节上会更加清晰一点
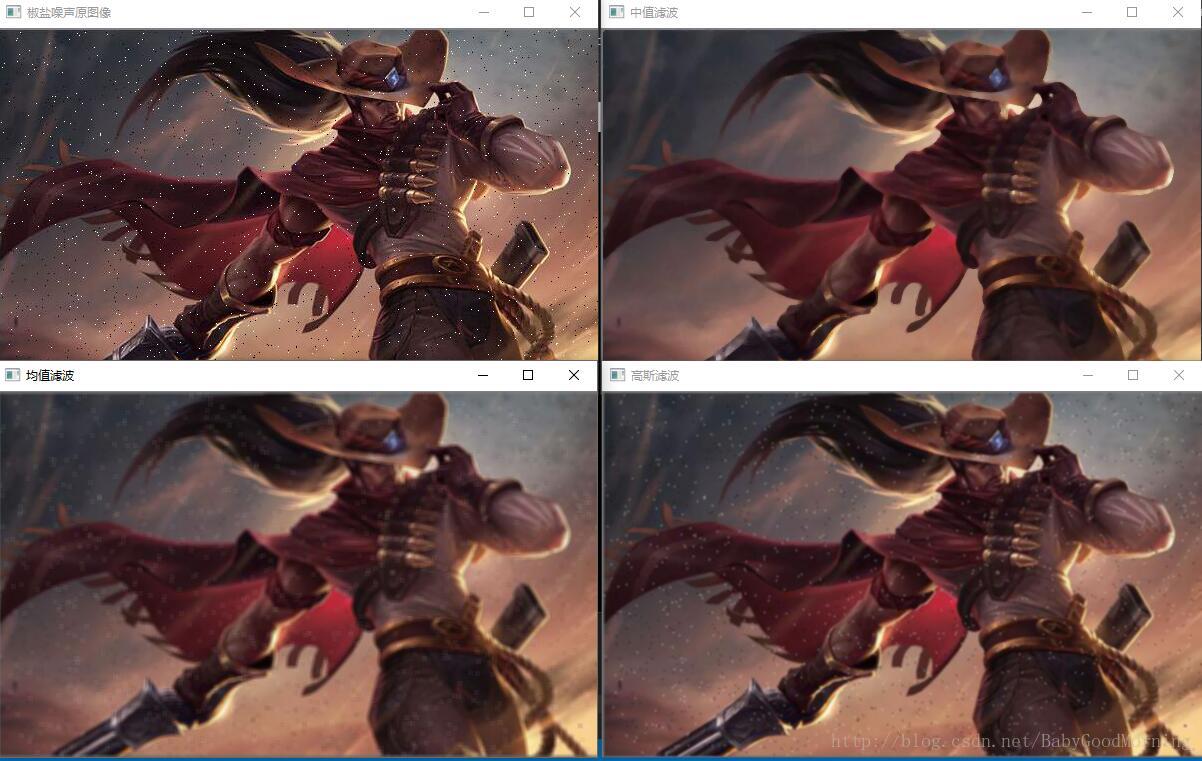
椒盐噪声图像中,带有随机分布的白点(盐),灰点(椒),中值滤波区中间值,能够有效过滤这两种灰度值的极值,因此,中值滤波对椒盐噪声的处理结果较好
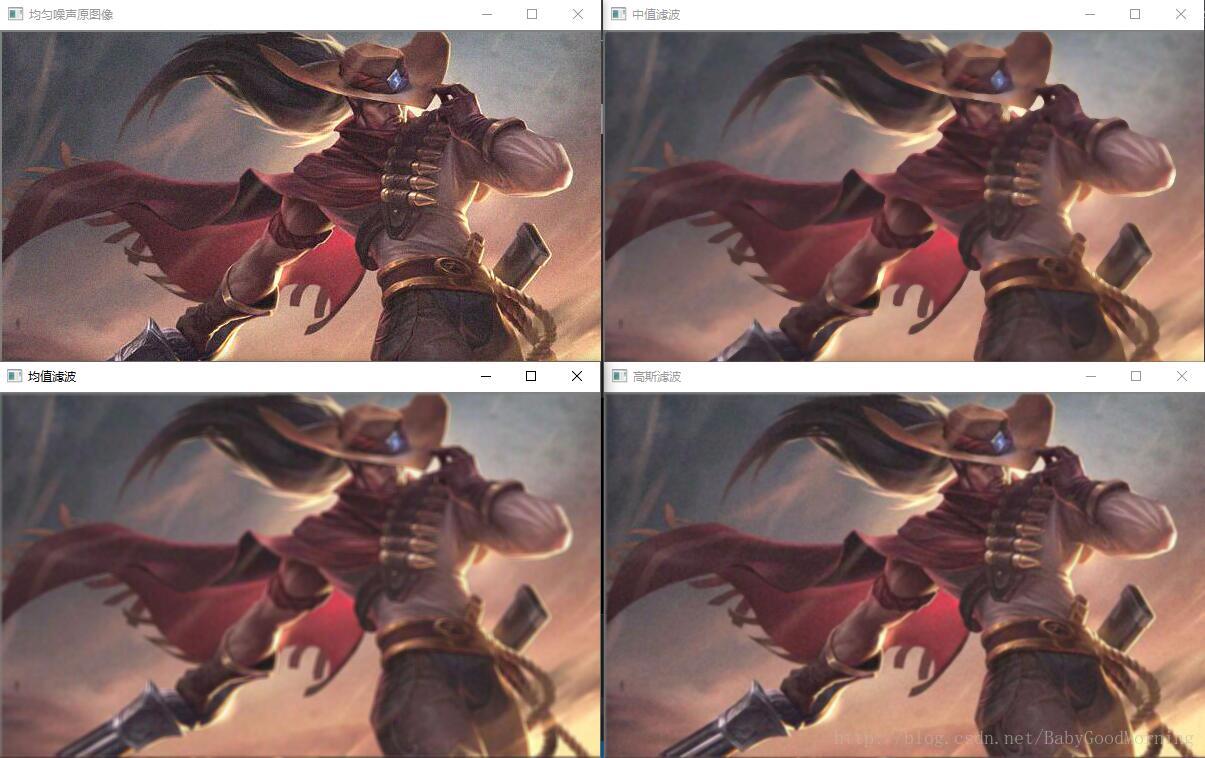
对于均匀噪声的添加是否正确,这个我不太清楚。按照自己的做法添加均匀噪声后,图像滤波如上所示,就清晰度来说还是高斯滤波的处理效果较好(仔细看可以发现的)
二. 图像锐化
1. Sobel算子
x方向梯度算子 Gx
⎡⎣⎢10−120−210−1⎤⎦⎥
y方向梯度算子 Gy
⎡⎣⎢121000−1−2−1⎤⎦⎥
⎡⎣⎢0−1−210−1210⎤⎦⎥⎡⎣⎢−2−10−101012⎤⎦⎥
IplImage* sobelSharp(IplImage* src) {
IplImage* dst = cvCreateImage(cvSize(src->width, src->height), src->depth, src->nChannels);
cvSobel(src, dst, 1, 1, 3);
return dst;
}
- 1
- 2
- 3
- 4
- 5
2. Robert算子
梯度采用的是对角方向相邻两像素之差
Δxf(x,y)=f(x,y)−f(x−1,y−1)
[−11]
Δyf(x,y)=f(x−1,y)−f(x,y−1)
[1−1]
IplImage* robertSharp(IplImage* src) {
IplImage* dst = cvCreateImage(cvSize(src->width, src->height), src->depth, src->nChannels);
char *srcData = src->imageData;
int width = dst->width;
int height = dst->height;
int widthStep = dst->widthStep;
char *imageData = dst->imageData;
for (int i = 1; i < height; i++) {
uchar* curLine = (uchar*)(srcData + i * widthStep);
uchar* preLine = curLine - widthStep;
uchar* ptr = (uchar*)(imageData + i * widthStep);
for (int j = 1; j < width; j++) {
for (int rgb = 0; rgb < 3; rgb++) {
double deltaX = curLine[3 * j + rgb] - preLine[3 * (j - 1) + rgb];
double deltaY = curLine[3 * (j - 1) + rgb] - preLine[3 * j + rgb];
double sum = abs(deltaX) + abs(deltaY);
if (sum > 255) sum = 255;
ptr[3 * j + rgb] = sum;
}
}
}
return dst;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
3. Prewitt算子
x方向梯度算子 Gx
⎡⎣⎢−101−101−101⎤⎦⎥
y方向梯度算子 Gy
⎡⎣⎢−1−1−1000111⎤⎦⎥
⎡⎣⎢0−1−110−1110⎤⎦⎥⎡⎣⎢−1−10−101011⎤⎦⎥
IplImage* sobelSharp2(IplImage* src) {
IplImage* dst = cvCreateImage(cvSize(src->width, src->height), src->depth, src->nChannels);
char *srcData = src->imageData;
int width = dst->width - 1;
int height = dst->height - 1;
int widthStep = dst->widthStep;
char *imageData = dst->imageData;
for (int i = 1; i < height; i++) {
uchar* curLine = (uchar*)(srcData + i * widthStep);
uchar* preLine = curLine - widthStep;
uchar* nexLine = curLine + widthStep;
uchar* ptr = (uchar*)(imageData + i * widthStep);
for (int j = 1; j < width; j++) {
for (int rgb = 0; rgb < 3; rgb++) {
double deltaX=nexLine[3*(j-1)+rgb] + 2*nexLine[3*j+rgb] + nexLine[3*(j+1)+ rgb]
- preLine[3*(j-1)+rgb] -2*preLine[3*j+rgb] - preLine[3*(j+1)+rgb];
double deltaY=preLine[3*(j+1)+rgb]+2*curLine[3*(j+1)+rgb]+nexLine[3*(j+ 1)+rgb]
- preLine[3*(j-1)+rgb] - 2*curLine[3*(j-1)+rgb]-nexLine[3 * (j - 1) + rgb];
double sum = (abs(deltaX)+ abs(deltaY))/4;
if (sum > 255) sum = 255;
ptr[3 * j + rgb] = sum;
}
}
}
return dst;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
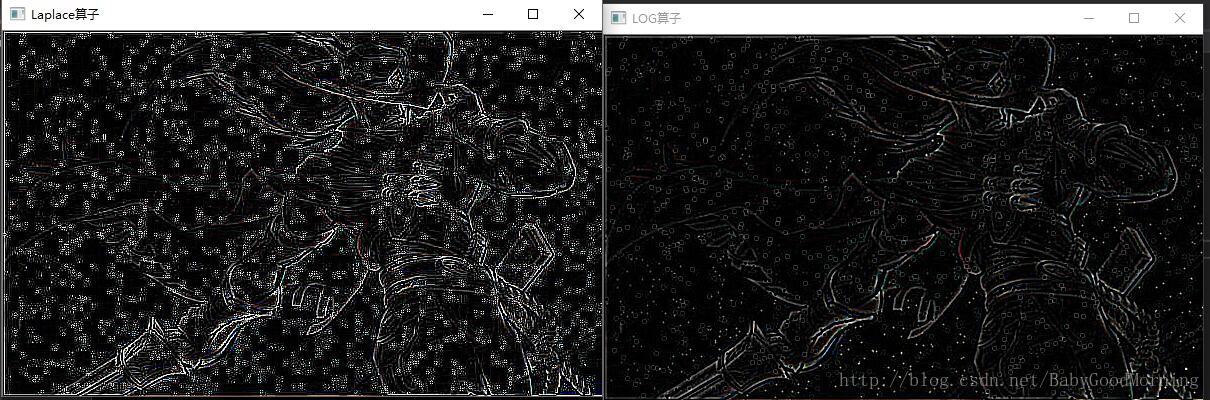
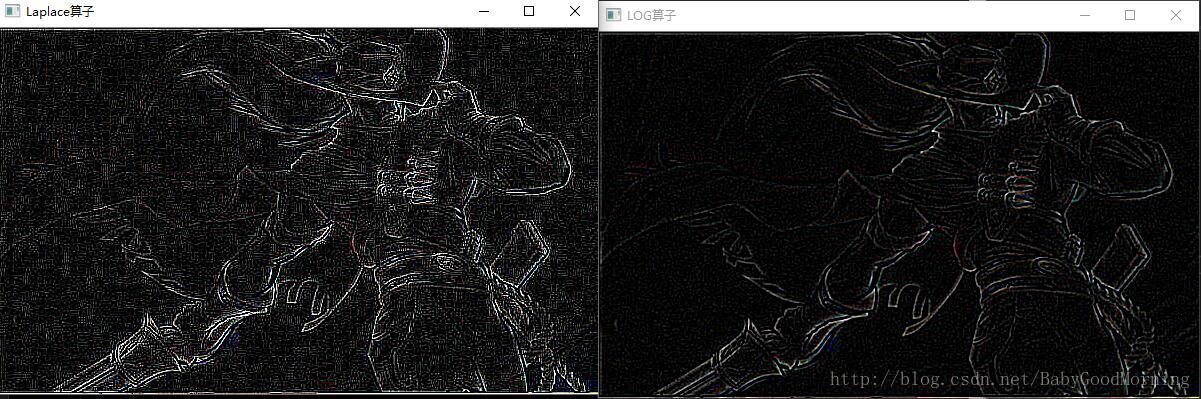
4. Laplacian算子
⎡⎣⎢0101−41010⎤⎦⎥⎡⎣⎢1111−81111⎤⎦⎥
IplImage* laplaceSharp(IplImage* src) {
IplImage* dst = cvCreateImage(cvSize(src->width, src->height), src->depth, src->nChannels);
cvLaplace(src, dst, 3);
return dst;
}
- 1
- 2
- 3
- 4
- 5
5. LOG算子
/*
LOG算子
先使用gaussian算子 光滑滤波处理
在使用Laplace算子 进行锐化
*/
IplImage* logSharp(IplImage* src) {
IplImage* dst = cvCreateImage(cvSize(src->width, src->height), src->depth, src->nChannels);
cvSmooth(src, dst, CV_GAUSSIAN, 3, 0, 0, 0);
cvLaplace(dst, dst, 3);
return dst;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
6. 实验结果
-
对正常图像进行锐化
-
对高斯噪声图像进行锐化
-
对含有椒盐噪声的图像进行锐化
-
对均匀噪声的图像进行锐化
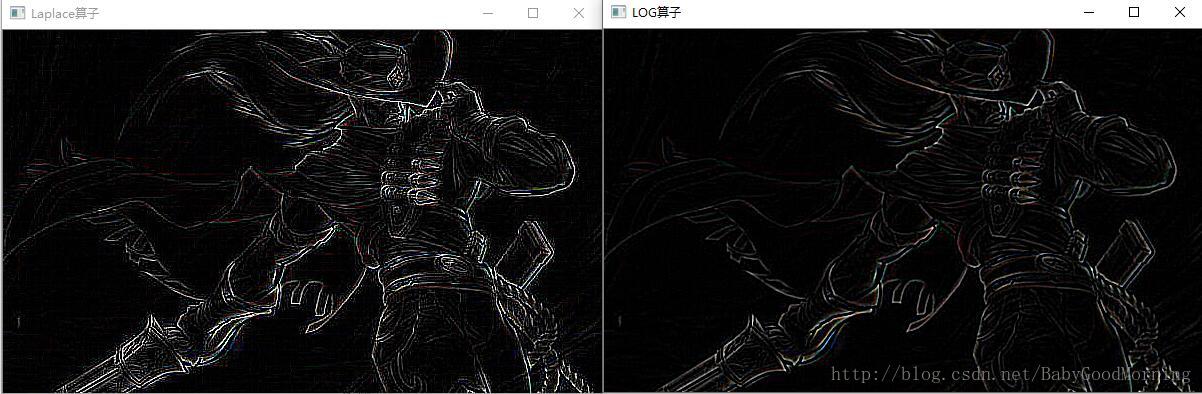
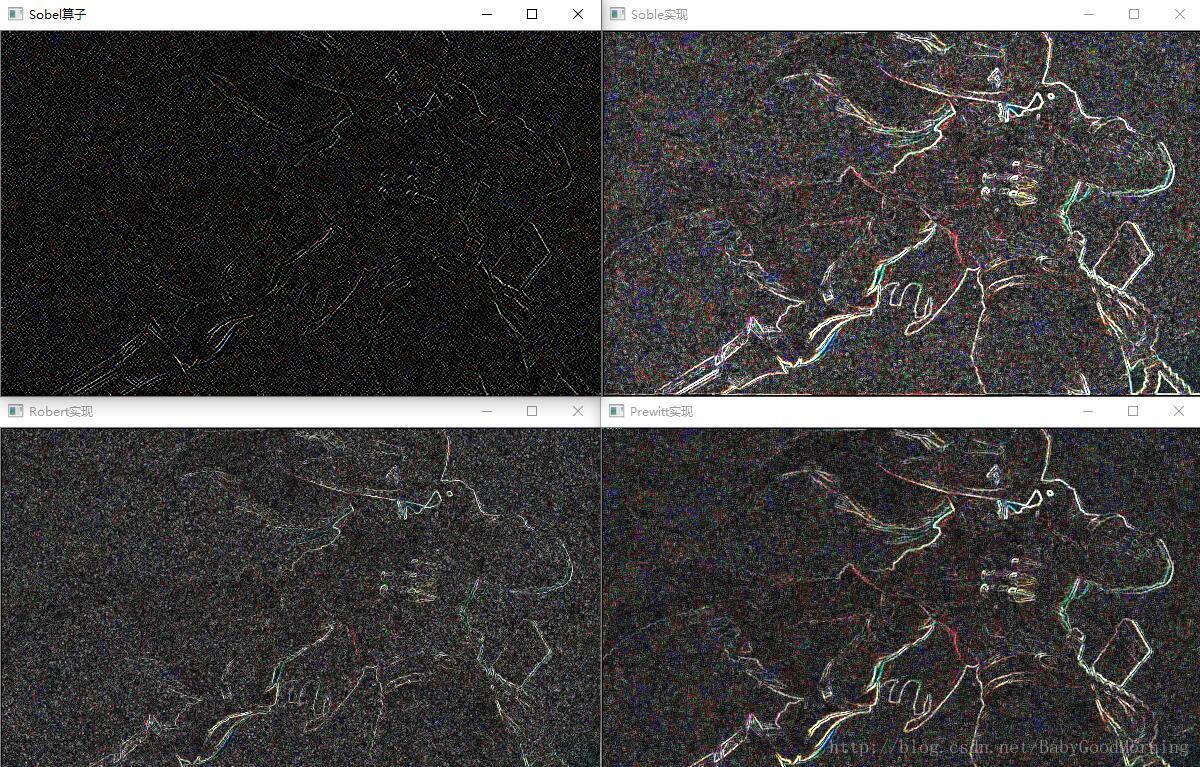
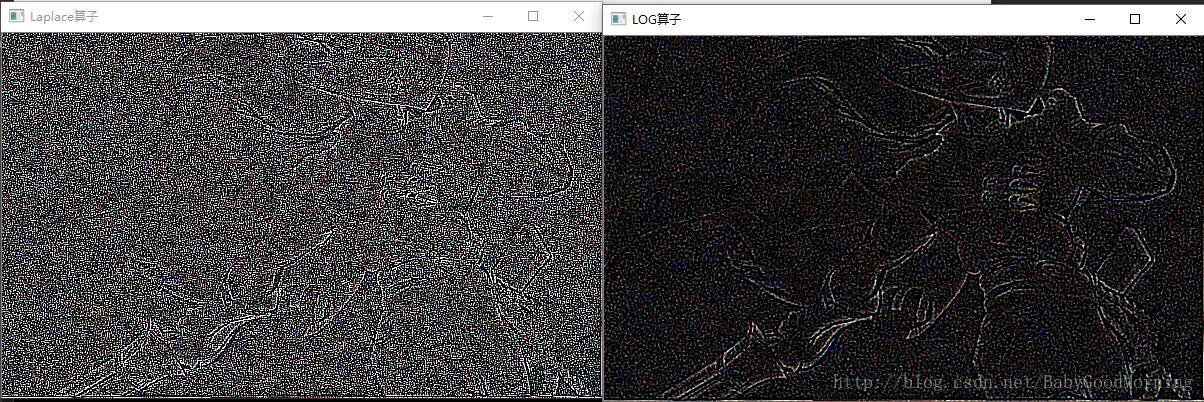
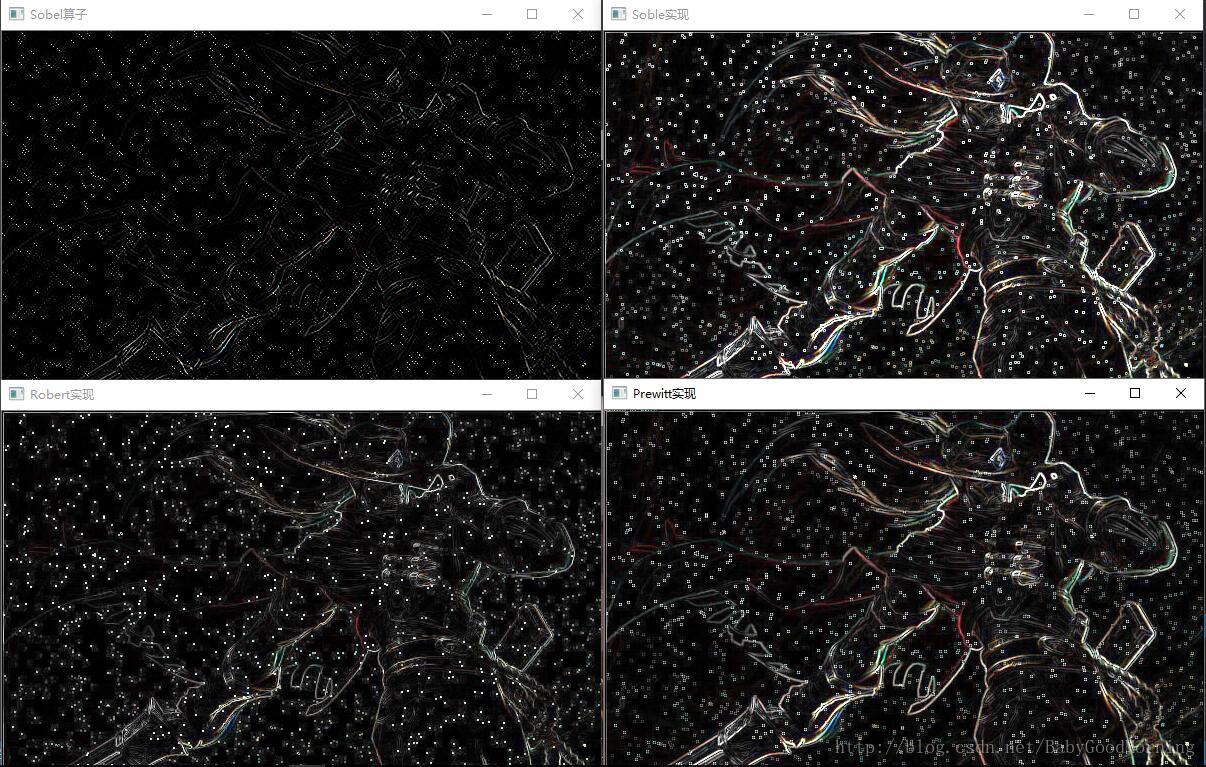
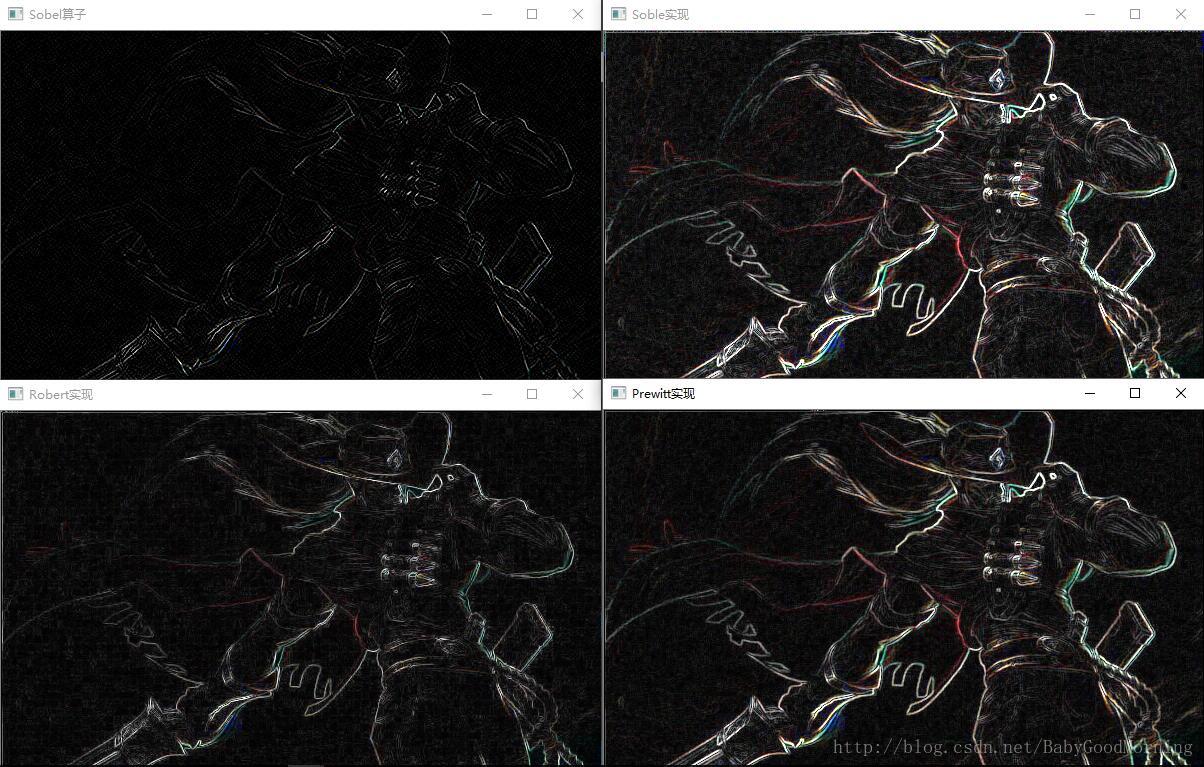
算子比较
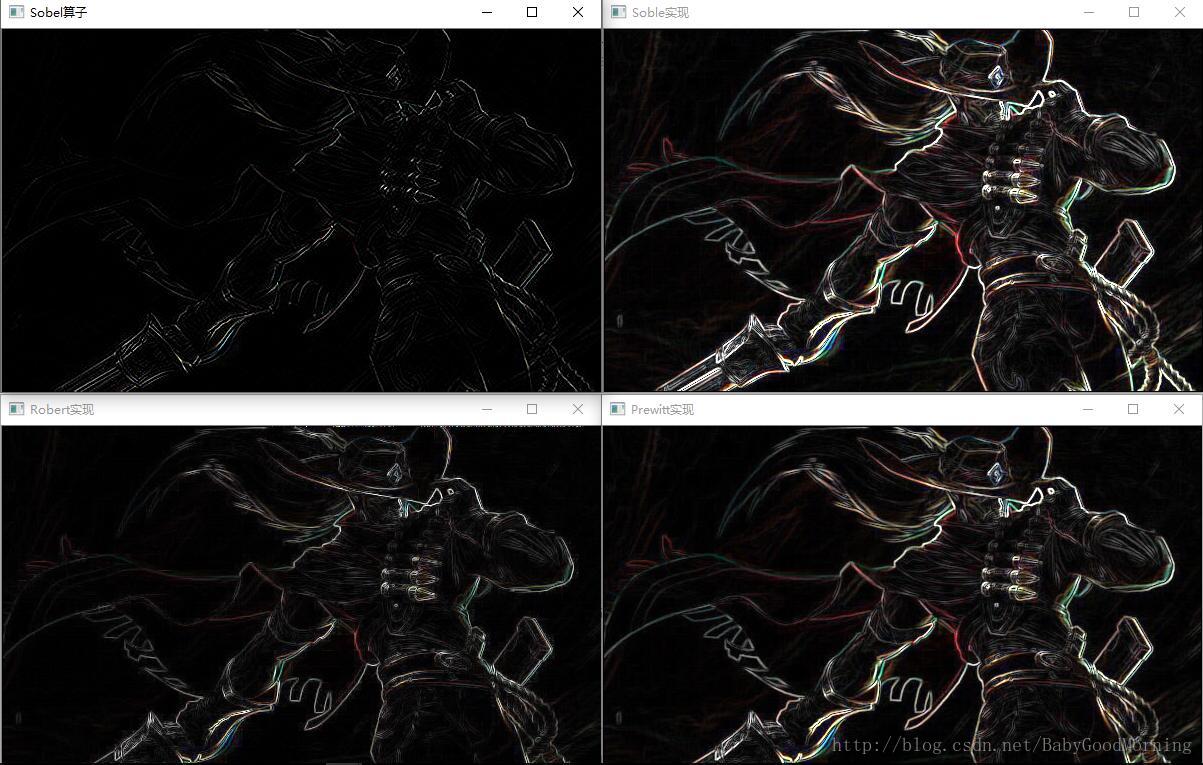
Robert算子,边缘定位精度较高,但容易丢失一部分边缘,同时由于图像没经过平滑处理,因此不具备抑制噪声的能力。该算子对具有陡峭边缘且含噪声少的图像效果较好。
Sobel算子和Prewitt算子:都是对图像先做加权平滑处理,然后再做微分运算,所不同的是平滑部分的权值有些差异,因此对噪声具有一定的抑制能力,但不能完全排除检测结果中出现的虚假边缘。检测的边缘容易出现多像素宽度
Laplacian算子:对噪声非常敏感,它使噪声成分得到加强,这两个特性使得该算子容易丢失一部分边缘的方向信息,造成一些不连续的检测边缘,同时抗噪声能力比较差。
LOG算子:该算子首先用高斯函数对图像作平滑滤波处理,然后才使用Laplacian算子检测边缘,因此克服了Laplacian算子抗噪声能力比较差的缺点,但是在抑制噪声的同时也可能将原有的比较尖锐的边缘也平滑掉了,造成这些尖锐边缘无法被检测到。
三. 图像去噪
1. 高斯噪声
p(z)=12π√σe−(z−μ)22σ2
Z∼N[μ,σ2]
这里使用了Box-Muller转化:
假设 U1 , U2 是(0, 1)之间均匀分布的两个独立的随机变量,
Z0=Rcos(θ)=−2lnU1−−−−−−−√cos(2πU2)
Z1=Rcos(θ)=−2lnU1−−−−−−−√sin(2πU2)
则 Z0 , Z1 是两个标准正态分布的随机变量即 Z∼N[0,1]
将标准正态分布转化为非标准正态分布 F∼N[μ,σ2]
则 f=z∗σ+μ
如下转化代码摘自 https://en.wikipedia.org/wiki/Box%E2%80%93Muller_transform
(有适当改动)
double generateGaussianNoise(double mu, double sigma)
{
const double epsilon = std::numeric_limits<double>::min();
const double two_pi = 2.0*3.14159265358979323846;
static double z0, z1;
static bool generate = true;
generate = !generate;
if (generate)
return z1 * sigma + mu;
double u1, u2;
do
{
u1 = rand() * (1.0 / RAND_MAX);
u2 = rand() * (1.0 / RAND_MAX);
} while (u1 <= epsilon);
double sqrt_u = sqrt(-2.0 * log(u1));
u2 *= two_pi;
//
z0 = sqrt_u * cos(u2);
z1 = sqrt_u * sin(u2);
return z0 * sigma + mu;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
2. 椒盐噪声
salt 盐 白色,指图像中的白点,pepper胡椒 黑色 ,图像中黑色的点
/*
src 原图像
n 在图像中随机生成n个白点和黑点
*/
IplImage* saltAndPepperNoise(IplImage* src, int n) {
IplImage* dst = src;
int width = dst->width;
int height = dst->height;
int widthStep = dst->widthStep;
char *imageData = dst->imageData;
//添加盐噪声
for (int i = 0; i < n; i ++) {
int x = rand() % width;
int y = rand() % height;
uchar* ptr = (uchar*)(imageData + y * widthStep);
ptr[3 * x] = 255;
ptr[3 * x + 1] = 255;
ptr[3 * x + 2] = 255;
}
//添加胡椒噪声
for (int i = 0; i < n; i++) {
int x = rand() % width;
int y = rand() % height;
uchar* ptr = (uchar*)(imageData + y * widthStep);
ptr[3 * x] = 0;
ptr[3 * x + 1] = 0;
ptr[3 * x + 2] = 0;
}
return dst;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
3. 均匀噪声
(0,1)的均匀分布, Z∼U[12,112],σ2=112
转化为 F∼U[μ,σ2] , 任意的均值为 μ , 方差为 σ2 的均匀分布。
f=(z−12)12−−√σ+μ
,这样可以得到我们自己想要的均匀分布
/*均匀噪声*/
IplImage* uniformNoise(IplImage* src, double mu, double sigma) {
IplImage* dst = src;
int width = dst->width * dst->nChannels;
int height = dst->height;
int widthStep = dst->widthStep;
char *imageData = dst->imageData;
for (int i = 0; i < height; i++) {
uchar* ptr = (uchar*)(imageData + i * widthStep);
for (int j = 0; j < width; j++) {
double p1 = ptr[j] + mu + cvSqrt(12) * sigma * (rand()/(double) RAND_MAX - 0.5);
if (p1 < 0) p1 = 0;
if (p1 > 255) p1 = 255;
ptr[j] = p1;
}
}
return dst;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
4. 实验结果
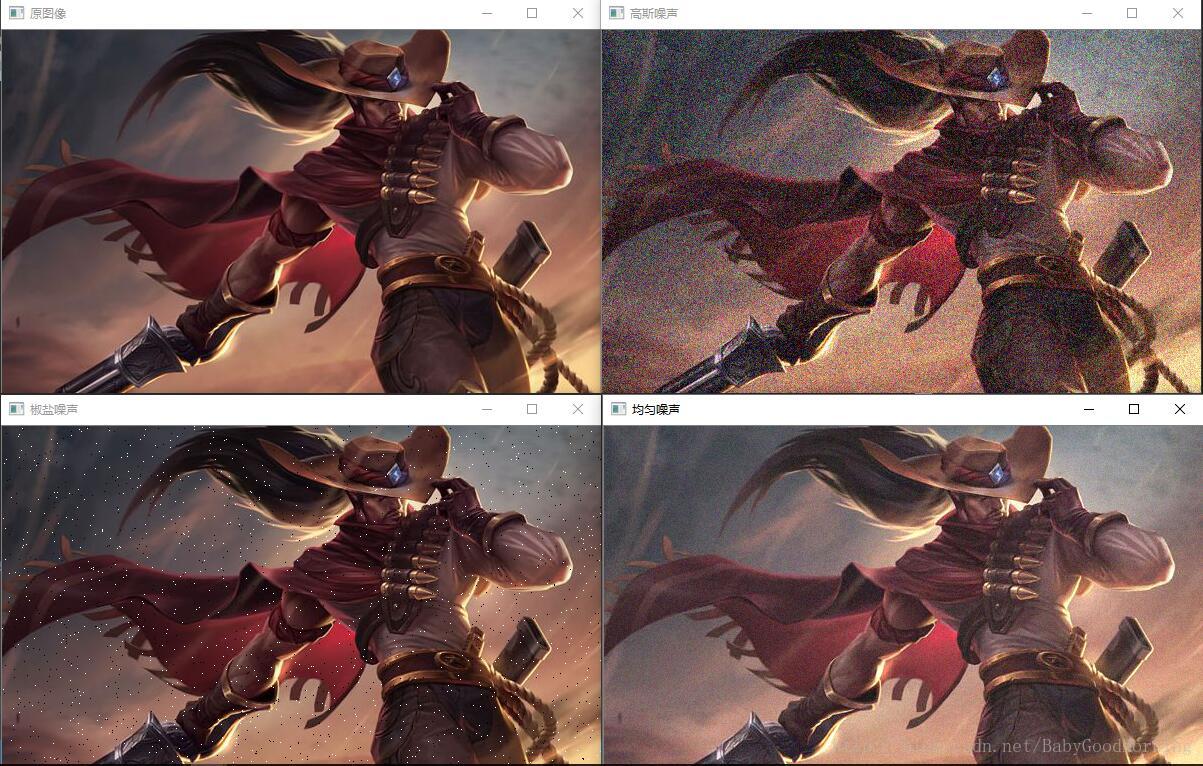
由实验结果可以得知,高斯噪声、均匀噪声,影响的是图片的没一个像素,而椒盐噪声影响的是图片的若干个点。
对于这几个图像的滤波,就不再演示了,在前面已经涉及到了。














 283
283











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









