







在音视频通信中,网络抖动和延迟是常见的问题,会导致音视频质量下降和用户体验不佳。为了解决这些问题,WebRTC引入了Jitter Buffer(抖动缓冲区)这一重要组件。Jitter Buffer是一个缓冲区,用于接收和处理网络传输中的音频和视频数据。它的主要作用是解决网络抖动和延迟带来的问题,以提供更稳定和流畅的音视频传输。Jitter Buffer通过调整数据包的接收和播放时间,使得音视频数据能够按照正确的顺序和时序进行解码和播放。
本文将从webrtc源码分析jitter buffer的实现,版本m98。
一、RTP数据包接收及解析
1、RTP包接收流程
- 跟P2P时的流程相似,从底层socket读取数据,到
UDPPort::OnReadPacket。
PhysicalSocketServer::WaitSelect>ProcessEvents>SocketDispatcher::OnEvent>SignalReadEvent>AsyncUDPSocket::OnReadEvent>SignalReadPacket>AllocationSequence::OnReadPacket>UDPPort::HandleIncomingPacket>UDPPort::OnReadPacket - 从
UDPPort::OnReadPacket到Call模块。
UDPPort::OnReadPacket>Connection::OnReadPacket>Connection::SignalReadPacket>P2PTransportChannel::OnReadPacket>P2PTransportChannel::SignalReadPacket>DtlsTransport::OnReadPacket>DtlsTransport::SignalReadPacket>RtpTransport::OnReadPacket>RtpTransport::OnRtpPacketReceived>RtpTransport::DemuxPacket>RtpDemuxer::OnRtpPacket>BaseChannel::OnRtpPacket>WebRtcVideoChannel::OnPacketReceived>Call::DeliverPacket>Call::DeliverRtp
2、RTP包解析
- 在
Call::DeliverRtp中通过调用RtpPacketReceived的Parse函数,进行RTP包的解析。
if (!parsed_packet.Parse(std::move(packet)))
return DELIVERY_PACKET_ERROR;
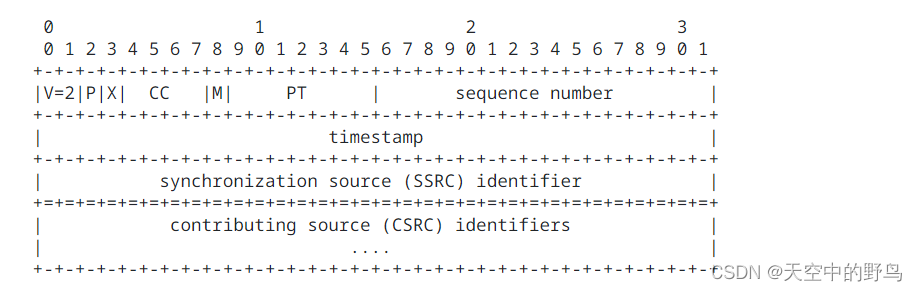
RtpPacketReceived继承于RtpPacket,也就是会调用RtpPacket::Parse>RtpPacket::ParseBuffer进行解析。- RTP头结构在webrtc源码阅读之h264 RTP打包中已经学习过了,如下图所示,根据RTP头结构,对RTP头中的关键参数进行解析。
3、RTP包H264解析
Call::DeliverRtp中解析完RTP包,会调用RtpStreamReceiverController::OnRtpPacket对解析后的RTP包进行处理。
if (video_receiver_controller_.OnRtpPacket(parsed_packet)) {
receive_stats_.AddReceivedVideoBytes(length,
parsed_packet.arrival_time());
event_log_->Log(
std::make_unique<RtcEventRtpPacketIncoming>(parsed_packet));
return DELIVERY_OK;
}
RtpStreamReceiverController::OnRtpPacket > RtpDemuxer::OnRtpPacket > RtpVideoStreamReceiver2::OnRtpPacket > RtpVideoStreamReceiver2::ReceivePacket
- 然后在
RtpVideoStreamReceiver2::ReceivePacket中调用VideoRtpDepacketizer的子类对rtp数据进行解析,以H264为例,就会调用VideoRtpDepacketizerH264::Parse。
absl::optional<VideoRtpDepacketizer::ParsedRtpPayload> parsed_payload =
type_it->second->Parse(packet.PayloadBuffer());
解析的过程就是打包的反过程,具体可以参考webrtc源码阅读之h264 RTP打包,本文不再分析。
二、视频JitterBuffer原理
- 通过PacketBuffer对收到的RTP包进行包的排序和组装,组装成一个完整的帧。
- 通过RtpFrameReferenceFinder将组装好的帧填充参考帧信息。
- 通过FrameBuffer判断填充了参考帧信息的完整帧是否是连续帧,并缓存下来。
- FrameBuffer根据某帧依赖的帧是否都已解码判断某帧是否可解码,交给解码器进行解码。
通过以上步骤可以保证每一帧是完整可靠的,且每一帧的参考帧都是完成可靠,那么当参考帧都解码以后,该帧便可以解码了。
1、判断完整帧
PacketBuffer::InsertResult PacketBuffer::InsertPacket(
std::unique_ptr<PacketBuffer::Packet> packet) {
PacketBuffer::InsertResult result;
uint16_t seq_num = packet->seq_num;
size_t index = seq_num % buffer_.size();
if (!first_packet_received_) {
first_seq_num_ = seq_num;
first_packet_received_ = true;
} else if (AheadOf(first_seq_num_, seq_num)) {//seq_num 在 first_seq_num之前
// If we have explicitly cleared past this packet then it's old,
// don't insert it, just silently ignore it.
if (is_cleared_to_first_seq_num_) {
return result;
}
first_seq_num_ = seq_num;
}
if (buffer_[index] != nullptr) {//buffer中 index对应的槽被占用了
// Duplicate packet, just delete the payload.
if (buffer_[index]->seq_num == packet->seq_num) {
return result;
}
// The packet buffer is full, try to expand the buffer.
//buffer满了的话,就扩展buffer,每次都是翻倍扩展
while (ExpandBufferSize() && buffer_[seq_num % buffer_.size()] != nullptr) {
}
index = seq_num % buffer_.size(); //计算扩展后的新index
// Packet buffer is still full since we were unable to expand the buffer.
if (buffer_[index] != nullptr) { //buffer已经扩展到最大了,就清空buffer,申请一个新的关键帧
// Clear the buffer, delete payload, and return false to signal that a
// new keyframe is needed.
RTC_LOG(LS_WARNING) << "Clear PacketBuffer and request key frame.";
ClearInternal();
result.buffer_cleared = true;
return result;
}
}
packet->continuous = false;
buffer_[index] = std::move(packet);
UpdateMissingPackets(seq_num); //更新丢包信息,用于NACK等计算
result.packets = FindFrames(seq_num); //查找一个完整帧
return result;
}
通过InsertPacket函数插入一包数据,并通过FindFrames判断完整帧。
std::vector<std::unique_ptr<PacketBuffer::Packet>> PacketBuffer::FindFrames(
uint16_t seq_num) {
std::vector<std::unique_ptr<PacketBuffer::Packet>> found_frames;
for (size_t i = 0; i < buffer_.size() && PotentialNewFrame(seq_num); ++i) { //该包是潜在的新帧
size_t index = seq_num % buffer_.size();
buffer_[index]->continuous = true; //设置包的连续性
//找到一帧的最后一包,往前推找到第一包,就是完整的一帧
if (buffer_[index]->is_last_packet_in_frame()) {
uint16_t start_seq_num = seq_num;
// Find the start index by searching backward until the packet with
// the `frame_begin` flag is set.
int start_index = index;
size_t tested_packets = 0;
int64_t frame_timestamp = buffer_[start_index]->timestamp;
// Identify H.264 keyframes by means of SPS, PPS, and IDR.
bool is_h264 = buffer_[start_index]->codec() == kVideoCodecH264;
bool has_h264_sps = false;
bool has_h264_pps = false;
bool has_h264_idr = false;
bool is_h264_keyframe = false;
int idr_width = -1;
int idr_height = -1;
while (true) {
++tested_packets;
if (!is_h264 && buffer_[start_index]->is_first_packet_in_frame()) //vp8及vp9判断逻辑就是找到第一包的标志
break;
if (is_h264) {
const auto* h264_header = absl::get_if<RTPVideoHeaderH264>(
&buffer_[start_index]->video_header.video_type_header);
if (!h264_header || h264_header->nalus_length >= kMaxNalusPerPacket)
return found_frames;
for (size_t j = 0; j < h264_header->nalus_length; ++j) {
if (h264_header->nalus[j].type == H264::NaluType::kSps) {
has_h264_sps = true;
} else if (h264_header->nalus[j].type == H264::NaluType::kPps) {
has_h264_pps = true;
} else if (h264_header->nalus[j].type == H264::NaluType::kIdr) {
has_h264_idr = true;
}
}
if ((sps_pps_idr_is_h264_keyframe_ && has_h264_idr && has_h264_sps &&
has_h264_pps) ||
(!sps_pps_idr_is_h264_keyframe_ && has_h264_idr)) {
is_h264_keyframe = true;
// Store the resolution of key frame which is the packet with
// smallest index and valid resolution; typically its IDR or SPS
// packet; there may be packet preceeding this packet, IDR's
// resolution will be applied to them.
if (buffer_[start_index]->width() > 0 &&
buffer_[start_index]->height() > 0) {
idr_width = buffer_[start_index]->width();
idr_height = buffer_[start_index]->height();
}
}
}
if (tested_packets == buffer_.size()) //已经把所有buffer缓存的包过了一遍了,没有找到与当前帧时间戳不一样的帧,
//也就是说当前帧之前的帧已经都不在buffer里了,或者当前帧就是第一帧,那么buffer中第一包就是帧的起始包
break;
start_index = start_index > 0 ? start_index - 1 : buffer_.size() - 1;
// In the case of H264 we don't have a frame_begin bit (yes,
// `frame_begin` might be set to true but that is a lie). So instead
// we traverese backwards as long as we have a previous packet and
// the timestamp of that packet is the same as this one. This may cause
// the PacketBuffer to hand out incomplete frames.
// See: https://bugs.chromium.org/p/webrtc/issues/detail?id=7106
if (is_h264 && (buffer_[start_index] == nullptr ||
buffer_[start_index]->timestamp != frame_timestamp)) {
break;
}
--start_seq_num;
}
if (is_h264) {
// Warn if this is an unsafe frame.
if (has_h264_idr && (!has_h264_sps || !has_h264_pps)) {
RTC_LOG(LS_WARNING)
<< "Received H.264-IDR frame "
"(SPS: "
<< has_h264_sps << ", PPS: " << has_h264_pps << "). Treating as "
<< (sps_pps_idr_is_h264_keyframe_ ? "delta" : "key")
<< " frame since WebRTC-SpsPpsIdrIsH264Keyframe is "
<< (sps_pps_idr_is_h264_keyframe_ ? "enabled." : "disabled");
}
// Now that we have decided whether to treat this frame as a key frame
// or delta frame in the frame buffer, we update the field that
// determines if the RtpFrameObject is a key frame or delta frame.
//更新帧类型信息
const size_t first_packet_index = start_seq_num % buffer_.size();
if (is_h264_keyframe) {
buffer_[first_packet_index]->video_header.frame_type =
VideoFrameType::kVideoFrameKey;
if (idr_width > 0 && idr_height > 0) {
// IDR frame was finalized and we have the correct resolution for
// IDR; update first packet to have same resolution as IDR.
buffer_[first_packet_index]->video_header.width = idr_width;
buffer_[first_packet_index]->video_header.height = idr_height;
}
} else {
buffer_[first_packet_index]->video_header.frame_type =
VideoFrameType::kVideoFrameDelta;
}
// If this is not a keyframe, make sure there are no gaps in the packet
// sequence numbers up until this point.
//如果当前帧是P帧,而且在当前序号前面还有丢包,就意味着当前帧之前有帧不完整,所以继续缓存
if (!is_h264_keyframe && missing_packets_.upper_bound(start_seq_num) !=
missing_packets_.begin()) {
return found_frames;
}
}
const uint16_t end_seq_num = seq_num + 1;
//把找到的完整帧的所有包放进found_frames中
uint16_t num_packets = end_seq_num - start_seq_num;
found_frames.reserve(found_frames.size() + num_packets);
for (uint16_t i = start_seq_num; i != end_seq_num; ++i) {
std::unique_ptr<Packet>& packet = buffer_[i % buffer_.size()];
RTC_DCHECK(packet);
RTC_DCHECK_EQ(i, packet->seq_num);
// Ensure frame boundary flags are properly set.
packet->video_header.is_first_packet_in_frame = (i == start_seq_num);
packet->video_header.is_last_packet_in_frame = (i == seq_num);
found_frames.push_back(std::move(packet));
}
//前面已经判断过如果是P帧,且前面有空洞会返回,所以这里:如果是P帧则不会清理,如果是I帧,则清理I帧之前的所有丢包
missing_packets_.erase(missing_packets_.begin(),
missing_packets_.upper_bound(seq_num));
}
++seq_num;
}
return found_frames;
}
首先判断包是否是潜在的新帧,判断逻辑大致就是:如果是一帧的第一包,那就是潜在新帧,否则如果该包的前一包是连续的,则是潜在新帧。然后如果找到最后一包的话,那就是有完整的一帧了。对于vpx来说,码流中有帧的第一包和最后一包的标志,所以直接判断即可;对于h264来说,最后一包的标志在RTP的Mark位设置,也不会判断错误;但是第一包判断上有问题(具体可见注释中bug report,个人没太理解为什么会这样),所以用时间戳变化来判断帧的第一包。
2、填充参考帧信息
RtpFrameReferenceFinder::ReturnVector RtpSeqNumOnlyRefFinder::ManageFrame(
std::unique_ptr<RtpFrameObject> frame) {
FrameDecision decision = ManageFrameInternal(frame.get());
//根据ManageFrameInternal的结果,如果是kStash就把帧缓存下来,
//如果是kHandOff,说明帧是连续的,该帧可能是之前缓存帧的参考帧,所以当该帧连续时,可以判断缓存帧中是否可以传播连续性
RtpFrameReferenceFinder::ReturnVector res;
switch (decision) {
case kStash:
if (stashed_frames_.size() > kMaxStashedFrames)
stashed_frames_.pop_back();
stashed_frames_.push_front(std::move(frame));
return res;
case kHandOff:
res.push_back(std::move(frame));
RetryStashedFrames(res);
return res;
case kDrop:
return res;
}
return res;
}
根据ManageFrameInternal的结果,如果是kStash就把帧缓存下来,如果是kHandOff,说明帧是连续的,该帧可能是之前缓存帧的参考帧,所以当该帧连续时,可以判断缓存帧中是否可以传播连续性。
RtpSeqNumOnlyRefFinder::FrameDecision
RtpSeqNumOnlyRefFinder::ManageFrameInternal(RtpFrameObject* frame) {
if (frame->frame_type() == VideoFrameType::kVideoFrameKey) { //关键帧、则插入新的GOP缓存
last_seq_num_gop_.insert(std::make_pair(
frame->last_seq_num(),
std::make_pair(frame->last_seq_num(), frame->last_seq_num())));
}
// We have received a frame but not yet a keyframe, stash this frame.
if (last_seq_num_gop_.empty()) //说明至今没收到关键帧,则缓存
return kStash;
// Clean up info for old keyframes but make sure to keep info
// for the last keyframe.
auto clean_to = last_seq_num_gop_.lower_bound(frame->last_seq_num() - 100); //最多缓存100个gop,清理掉100个之前的gop缓存
for (auto it = last_seq_num_gop_.begin();
it != clean_to && last_seq_num_gop_.size() > 1;) {
it = last_seq_num_gop_.erase(it);
}
// Find the last sequence number of the last frame for the keyframe
// that this frame indirectly references.
//找到第一个大于该帧序列号的关键帧,那么该关键帧的前一个关键帧对应的gop就是该帧所在的gop
auto seq_num_it = last_seq_num_gop_.upper_bound(frame->last_seq_num());
if (seq_num_it == last_seq_num_gop_.begin()) {
RTC_LOG(LS_WARNING) << "Generic frame with packet range ["
<< frame->first_seq_num() << ", "
<< frame->last_seq_num()
<< "] has no GoP, dropping frame.";
return kDrop;
}
seq_num_it--;
// Make sure the packet sequence numbers are continuous, otherwise stash
// this frame.
//rtp数据中可能带有填充包,last_picture_id_gop对应的是真实编码数据的序列号,
//last_picture_id_with_padding_gop对应的是可能填充包数据的序列号
uint16_t last_picture_id_gop = seq_num_it->second.first;
uint16_t last_picture_id_with_padding_gop = seq_num_it->second.second;
if (frame->frame_type() == VideoFrameType::kVideoFrameDelta) {
uint16_t prev_seq_num = frame->first_seq_num() - 1;
//判断该帧是否连续,即前一帧有没有缓存在gop中
if (prev_seq_num != last_picture_id_with_padding_gop)
return kStash;
}
RTC_DCHECK(AheadOrAt(frame->last_seq_num(), seq_num_it->first));
// Since keyframes can cause reordering we can't simply assign the
// picture id according to some incrementing counter.
frame->SetId(frame->last_seq_num());
frame->num_references =
frame->frame_type() == VideoFrameType::kVideoFrameDelta; //设置参考帧个数,关键帧就是0;否则是1,Webrtc默认每个帧前面的一帧是该帧的参考帧
frame->references[0] = rtp_seq_num_unwrapper_.Unwrap(last_picture_id_gop);
if (AheadOf<uint16_t>(frame->Id(), last_picture_id_gop)) {
seq_num_it->second.first = frame->Id();
seq_num_it->second.second = frame->Id();
}
UpdateLastPictureIdWithPadding(frame->Id());
frame->SetSpatialIndex(0);
frame->SetId(rtp_seq_num_unwrapper_.Unwrap(frame->Id()));
return kHandOff;
}
通过RtpFrameReferenceFinder::ManageFrame填充好帧的关键帧信息,并把连续的帧返回给RtpVideoStreamReceiver2。
3、FrameBuffer插入帧
int64_t FrameBuffer::InsertFrame(std::unique_ptr<EncodedFrame> frame) {
TRACE_EVENT0("webrtc", "FrameBuffer::InsertFrame");
RTC_DCHECK(frame);
MutexLock lock(&mutex_);
int64_t last_continuous_frame_id = last_continuous_frame_.value_or(-1);
if (!ValidReferences(*frame)) { //判断帧的参考帧是否有效,判断规则:1、参考帧必须在该帧前面
// 2、每帧的参考帧不能相同 (实际上webrtc默认每帧的参考帧就是前面一帧)
RTC_LOG(LS_WARNING) << "Frame " << frame->Id()
<< " has invalid frame references, dropping frame.";
return last_continuous_frame_id;
}
if (frames_.size() >= kMaxFramesBuffered) {
if (frame->is_keyframe()) {
RTC_LOG(LS_WARNING) << "Inserting keyframe " << frame->Id()
<< " but buffer is full, clearing"
" buffer and inserting the frame.";
ClearFramesAndHistory();
} else {
RTC_LOG(LS_WARNING) << "Frame " << frame->Id()
<< " could not be inserted due to the frame "
"buffer being full, dropping frame.";
return last_continuous_frame_id;
}
}
auto last_decoded_frame = decoded_frames_history_.GetLastDecodedFrameId();
auto last_decoded_frame_timestamp =
decoded_frames_history_.GetLastDecodedFrameTimestamp();
if (last_decoded_frame && frame->Id() <= *last_decoded_frame) {
if (AheadOf(frame->Timestamp(), *last_decoded_frame_timestamp) &&
frame->is_keyframe()) {
//帧id小于上一个解码的帧,但是时间戳比较新,而且还是关键帧,这可能是编码器重启了,所以这也是一个新的帧
// If this frame has a newer timestamp but an earlier frame id then we
// assume there has been a jump in the frame id due to some encoder
// reconfiguration or some other reason. Even though this is not according
// to spec we can still continue to decode from this frame if it is a
// keyframe.
RTC_LOG(LS_WARNING)
<< "A jump in frame id was detected, clearing buffer.";
ClearFramesAndHistory();
last_continuous_frame_id = -1;
} else {
RTC_LOG(LS_WARNING) << "Frame " << frame->Id() << " inserted after frame "
<< *last_decoded_frame
<< " was handed off for decoding, dropping frame.";
return last_continuous_frame_id;
}
}
// Test if inserting this frame would cause the order of the frames to become
// ambiguous (covering more than half the interval of 2^16). This can happen
// when the frame id make large jumps mid stream.
if (!frames_.empty() && frame->Id() < frames_.begin()->first &&
frames_.rbegin()->first < frame->Id()) {
RTC_LOG(LS_WARNING) << "A jump in frame id was detected, clearing buffer.";
ClearFramesAndHistory();
last_continuous_frame_id = -1;
}
auto info = frames_.emplace(frame->Id(), FrameInfo()).first; //插入该帧,并为该帧创建一个对应的FrameInfo
if (info->second.frame) {
return last_continuous_frame_id;
}
if (!UpdateFrameInfoWithIncomingFrame(*frame, info)) //更新该帧对应的FrameInfo
return last_continuous_frame_id;
if (!frame->delayed_by_retransmission())
timing_->IncomingTimestamp(frame->Timestamp(), frame->ReceivedTime());
// It can happen that a frame will be reported as fully received even if a
// lower spatial layer frame is missing.
if (stats_callback_ && frame->is_last_spatial_layer) {
stats_callback_->OnCompleteFrame(frame->is_keyframe(), frame->size(),
frame->contentType());
}
info->second.frame = std::move(frame);
if (info->second.num_missing_continuous == 0) {
info->second.continuous = true;
PropagateContinuity(info);
last_continuous_frame_id = *last_continuous_frame_;
// Since we now have new continuous frames there might be a better frame
// to return from NextFrame.
//有个新的连续帧了,发送给FindNextFrame函数
if (callback_queue_) {
callback_queue_->PostTask([this] {
MutexLock lock(&mutex_);
if (!callback_task_.Running())
return;
RTC_CHECK(frame_handler_);
callback_task_.Stop();
StartWaitForNextFrameOnQueue();
});
}
}
return last_continuous_frame_id;
}
UpdateFrameInfoWithIncomingFrame更新的就是的信息主要就是帧的连续性以及缺少的参考帧的数目。如果帧不缺少参考帧,且帧是连续的,则说明该帧是可解码的。就会重启寻找可解码帧的任务,将可解码帧进行解码。
4、寻找可解码帧
int64_t FrameBuffer::FindNextFrame(int64_t now_ms) {
int64_t wait_ms = latest_return_time_ms_ - now_ms;
frames_to_decode_.clear();
// `last_continuous_frame_` may be empty below, but nullopt is smaller
// than everything else and loop will immediately terminate as expected.
for (auto frame_it = frames_.begin();
frame_it != frames_.end() && frame_it->first <= last_continuous_frame_;
++frame_it) {
if (!frame_it->second.continuous ||
frame_it->second.num_missing_decodable > 0) { //帧是连续的,且不缺失参考帧
continue;
}
EncodedFrame* frame = frame_it->second.frame.get();
if (keyframe_required_ && !frame->is_keyframe()) //如果需要关键帧,但是当前帧不是关键帧,则不能解码
continue;
auto last_decoded_frame_timestamp =
decoded_frames_history_.GetLastDecodedFrameTimestamp();
// TODO(https://bugs.webrtc.org/9974): consider removing this check
// as it may make a stream undecodable after a very long delay between
// frames.
//比上次解码的帧时间戳更早,不可解码
if (last_decoded_frame_timestamp &&
AheadOf(*last_decoded_frame_timestamp, frame->Timestamp())) {
continue;
}
// Gather all remaining frames for the same superframe.
std::vector<FrameMap::iterator> current_superframe;
current_superframe.push_back(frame_it);
bool last_layer_completed = frame_it->second.frame->is_last_spatial_layer;
FrameMap::iterator next_frame_it = frame_it;
while (!last_layer_completed) { //vpx的逻辑
++next_frame_it;
if (next_frame_it == frames_.end() || !next_frame_it->second.frame) {
break;
}
if (next_frame_it->second.frame->Timestamp() != frame->Timestamp() ||
!next_frame_it->second.continuous) {
break;
}
if (next_frame_it->second.num_missing_decodable > 0) {
bool has_inter_layer_dependency = false;
for (size_t i = 0; i < EncodedFrame::kMaxFrameReferences &&
i < next_frame_it->second.frame->num_references;
++i) {
if (next_frame_it->second.frame->references[i] >= frame_it->first) {
has_inter_layer_dependency = true;
break;
}
}
// If the frame has an undecoded dependency that is not within the same
// temporal unit then this frame is not yet ready to be decoded. If it
// is within the same temporal unit then the not yet decoded dependency
// is just a lower spatial frame, which is ok.
if (!has_inter_layer_dependency ||
next_frame_it->second.num_missing_decodable > 1) {
break;
}
}
current_superframe.push_back(next_frame_it);
last_layer_completed = next_frame_it->second.frame->is_last_spatial_layer;
}
// Check if the current superframe is complete.
// TODO(bugs.webrtc.org/10064): consider returning all available to
// decode frames even if the superframe is not complete yet.
if (!last_layer_completed) {
continue;
}
frames_to_decode_ = std::move(current_superframe); //将可解码的帧放到frames_to_decode_
if (frame->RenderTime() == -1) { //设置Render时间
frame->SetRenderTime(timing_->RenderTimeMs(frame->Timestamp(), now_ms));
}
bool too_many_frames_queued =
frames_.size() > zero_playout_delay_max_decode_queue_size_ ? true
: false;
wait_ms = timing_->MaxWaitingTime(frame->RenderTime(), now_ms,
too_many_frames_queued); //设置下一帧等待时间
// This will cause the frame buffer to prefer high framerate rather
// than high resolution in the case of the decoder not decoding fast
// enough and the stream has multiple spatial and temporal layers.
// For multiple temporal layers it may cause non-base layer frames to be
// skipped if they are late.
if (wait_ms < -kMaxAllowedFrameDelayMs)
continue;
break;
}
wait_ms = std::min<int64_t>(wait_ms, latest_return_time_ms_ - now_ms);
wait_ms = std::max<int64_t>(wait_ms, 0);
return wait_ms;
}
FrameBuffer通过FindNextFrame找到可解码帧,通过GetNextFrame获取可解码帧,然后交由解码器进行解码。














 1521
1521











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









