







 本文介绍了ISPRS提供的Vaihingen和Postdam高分辨率航空影像数据集,用于2D语义分割任务,包含6类土地覆盖标注。数据集分析显示类别不平衡,官方提供评估工具和下载指南。适合研究者进行基准测试和自定义数据评估。
本文介绍了ISPRS提供的Vaihingen和Postdam高分辨率航空影像数据集,用于2D语义分割任务,包含6类土地覆盖标注。数据集分析显示类别不平衡,官方提供评估工具和下载指南。适合研究者进行基准测试和自定义数据评估。
Benchmark Test
As of now (summer 2018) all reference data for all benchmarks we are running is available for download - end of the benchmark challenge!
This means that we are stopping evaluating and publishing new results on our website. Instead, participants are encouraged to do an evaluation using the now available independent reference data on their own.(2018年夏天截止,想刷榜的,洗洗睡吧)
官方也提供了一份评估分割结果的C++代码。
Request the data
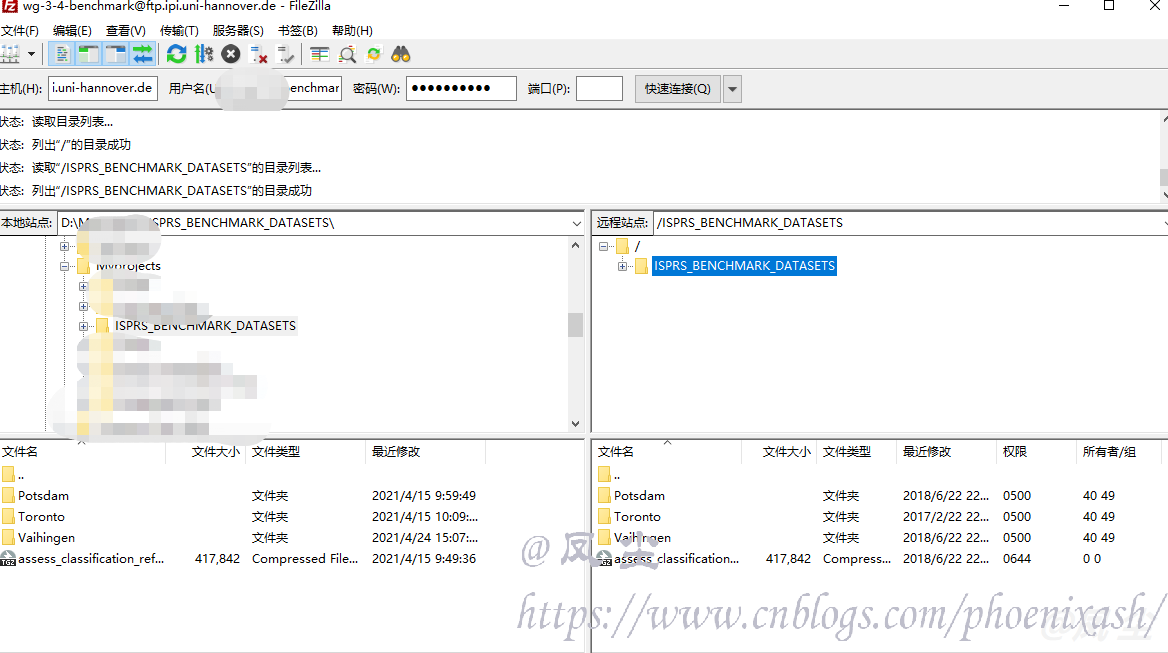
When you request the data you will receive an ftp download link to all the data, includig all the reference data. For the formal issues (terms of use), see this doc.
数据还是很好获取的,填个表,然后下个FileZilla_3.51.0_win64软件,到时候邮件里会有对应的链接和用户名密码,填上后下载就好了。
2D Semantic Labeling
ISPRS提供了城市分类和三维建筑重建测试项目的两个最先进的机载图像数据集。该数据集采用了由高分辨率正交照片和相应的密集图像匹配技术产生的数字地表模型(DSM)。这两个数据集区域都涵盖了城市场景。Vaihingen是一个相对较小的村庄,有许多独立的建筑和小的多层建筑;Postdam是一个典型的历史城市,有着大的建筑群、狭窄的街道和密集的聚落结构。每个数据集已手动分类为6个最常见的土地覆盖类别。
①不透水面 (RGB: 255, 255, 255)
②建筑物(RGB: 0, 0, 255)
③低矮植被 (RGB: 0, 255, 255)
④树木 (RGB: 0, 255, 0)
⑤汽车(RGB: 255, 255, 0)
⑥背景 (RGB: 255, 0, 0)
背景类包括水体和与其他已定义类别不同的物体(例如容器、网球场、游泳池),这些物体通常属于城市场景中的不感兴趣的语义对象。
- Vaihingen
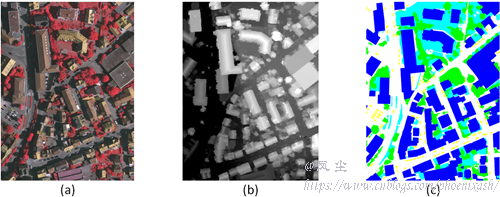
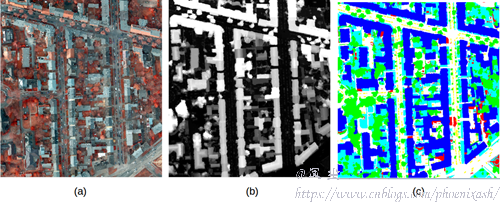
该数据集包含33幅不同大小的遥感图像,每幅图像都是从一个更大的顶层正射影像图片提取的,图像选择的过程避免了出现没有数据的情况。顶层影像和DSM的空间分辨率为9 cm。遥感图像格式为8位TIFF文件,由近红外、红色和绿色3个波段组成。DSM是单波段的TIFF文件,灰度等级(对应于DSM高度)为32位浮点值编码。
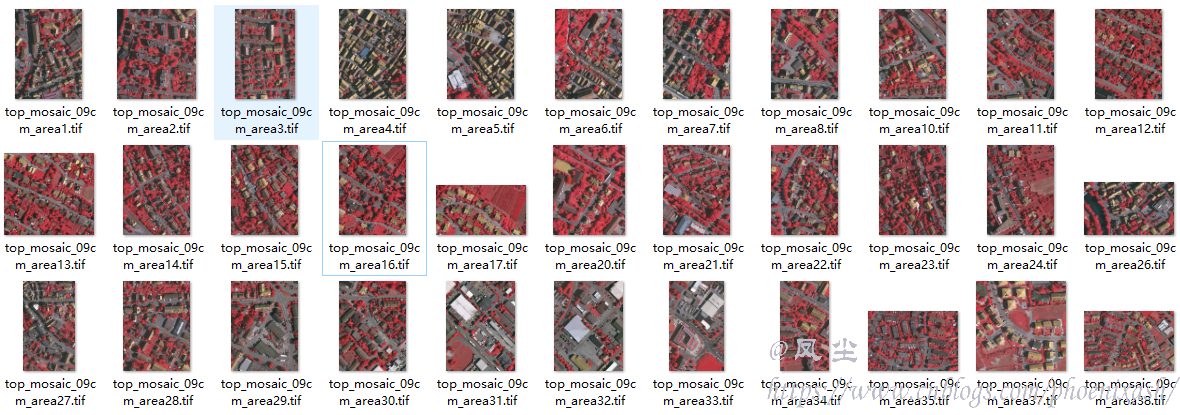
Vaihingen 数据集一览:
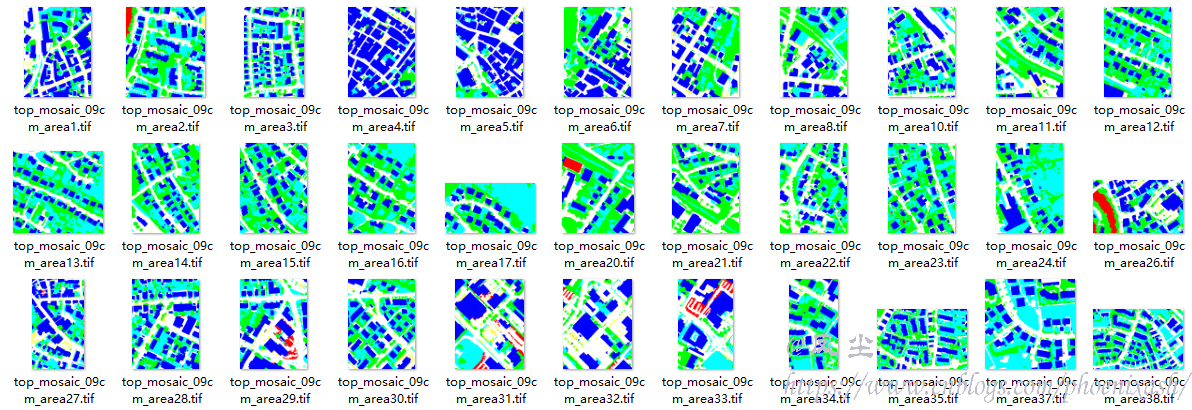
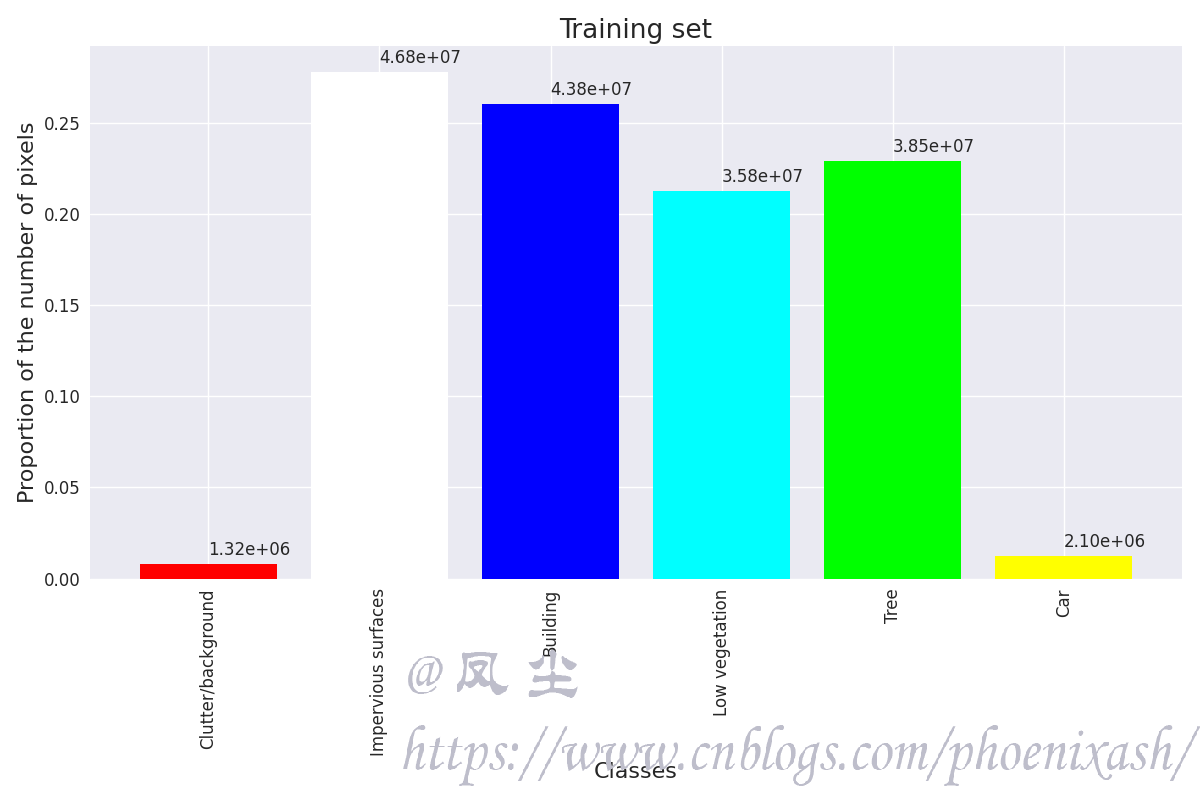
数据集ground truth中各类别分布:
可以看到出现了类别不平衡问题。
- Postdam
数据集包含28幅相同size的图像,顶层影像和DSM的空间分辨率为5 cm。,与Vaihingen区域类似,该数据集也是由3个波段的遥感TIFF文件和单波段的DSM组成。其每幅遥感图像区域覆盖大小是相同的。这样,遥感图像和DSM是在同一个参考系统上定义的(UTM WGS84)。每幅图像都有一个仿射变换文件,以便在需要时将图像重新分解为更小的图片。
数据集还提供了TOP影像的不同通道组合的tiff存储形式,以便参与人员选择各自所需的数据:
- IRRG: 3 channels (IR-R-G)
- RGB: 3 channels (R-G-B)
- RGBIR: 4 channels (R-G-B-IR)
除了DSM,数据集还提供了归一化DSM,即在地面过滤之后,每个像素的地面高度被移除,从而产生了高于地形的高度表示。这些数据是使用一些全自动过滤工作流产生的,没有人工质量控制。因此,不保证这里没有错误的数据,这是为了帮助研究人员使用高度数据,而不使用绝对的DSM。


















 454
454

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









