






该仿真模型包括三个模块:Carsim车辆、ESP控制模块(PID控制)、信号输出模块。该文档主要对提供的案例模型的运行进行简单介绍。
针对Carsim车辆在此不做过度描述。
关于ESP控制,其控制逻辑:如果实际横摆角速度与理想横摆角速度之间产生的偏差超过了可以接受的范围,ESP控制器就应该开始工作,控制四个车轮的轮缸压力,进一步控制四个车轮的速度,通过车轮之间的速度差产生一个横摆力矩,从而使得车辆的实际横摆角速度接近理想横摆角速度。控制架构如图1所示。
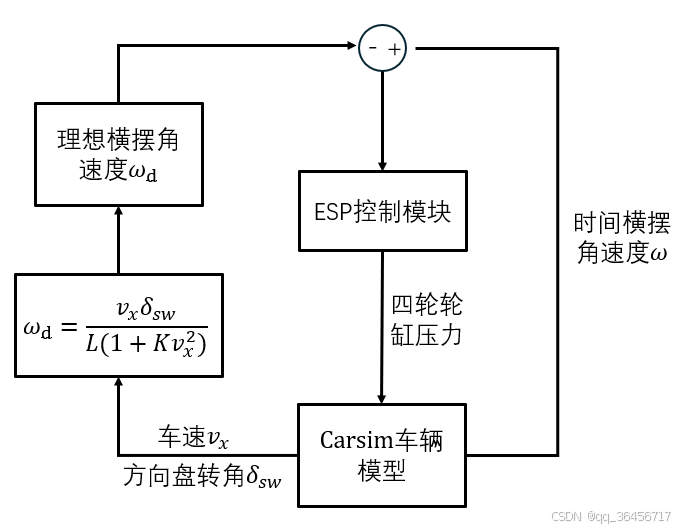
图 1 ESP控制架构
本案例中采用的控制算法为PID控制,选取参数P=0.5,I=0,D=0(参数可自行调整);PID控制较为简单,在此不做多余描述。
- 运行简介
本案例提供的模型文件:ESP1.mdl。
具体运行流程:
- 打开Carsim,如图2。
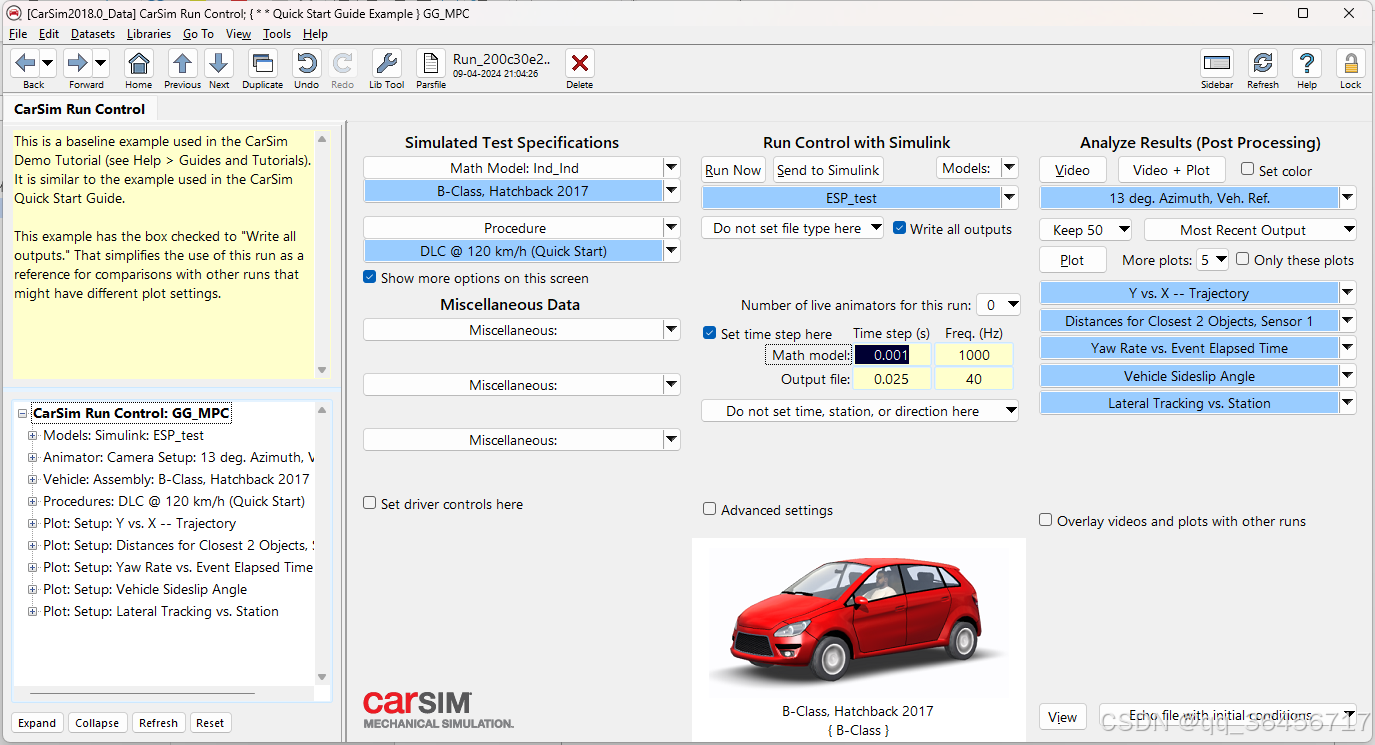
图 2
- 点开DLC@120km/h(Quick Start),设置如图3。
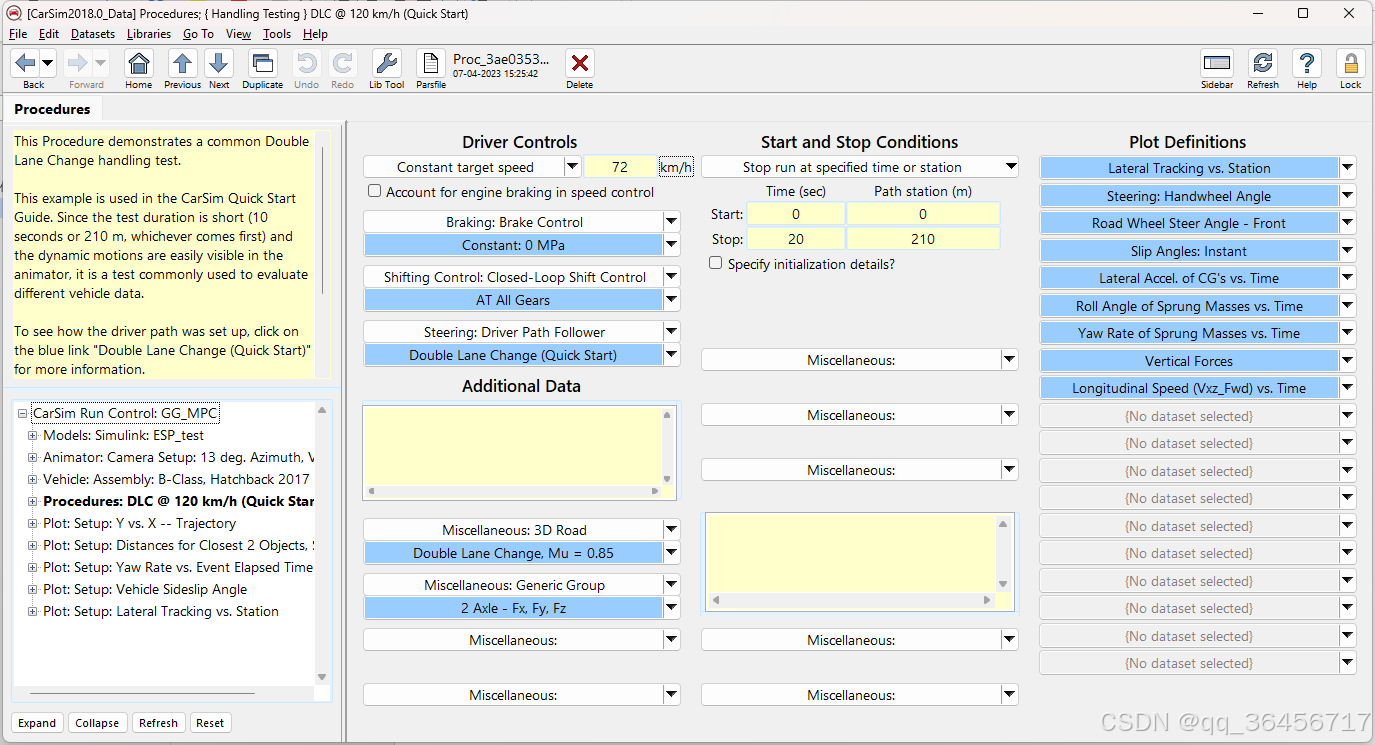
图 3
- 如图4建立Carsim与Simulink的连接。
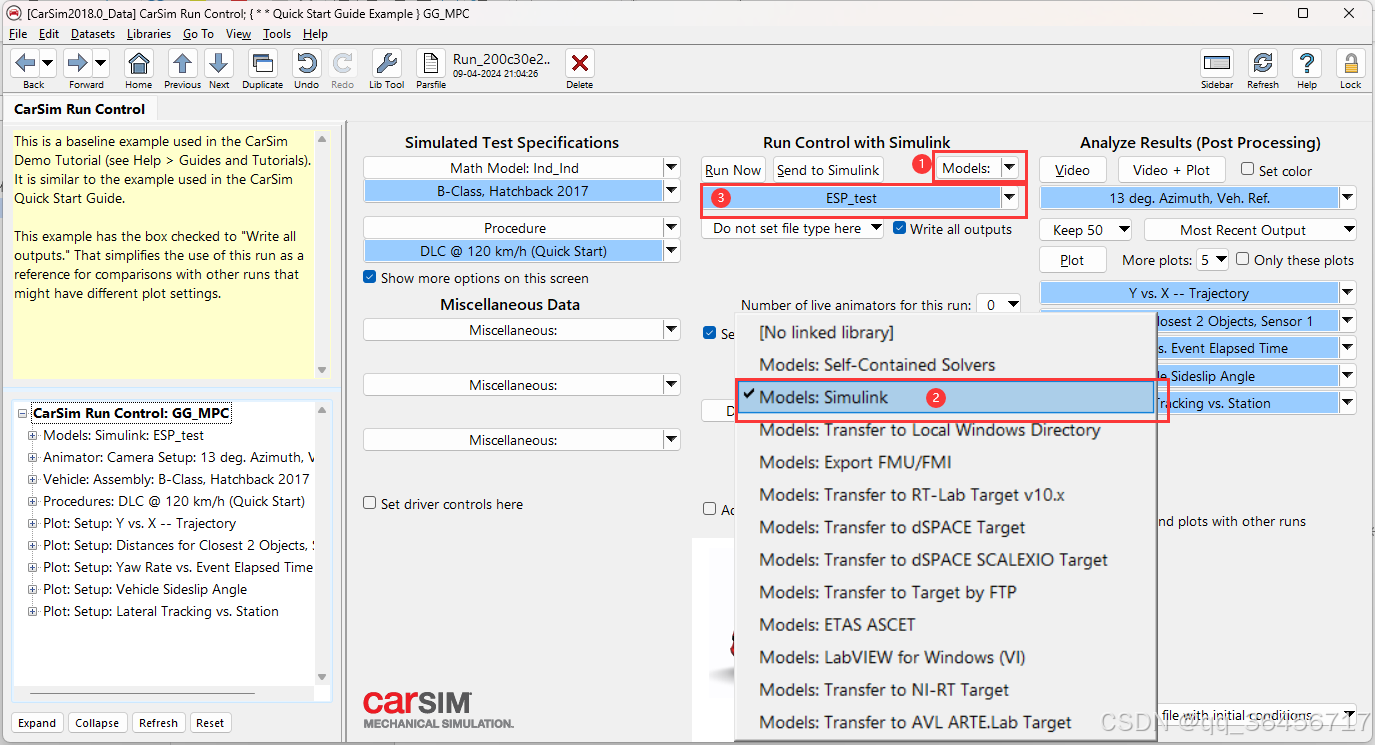
图 4
- 点开ESP_test,如图5进行1操作选取所提供的模型,进行2和3操作Carsim输入和输出设置。
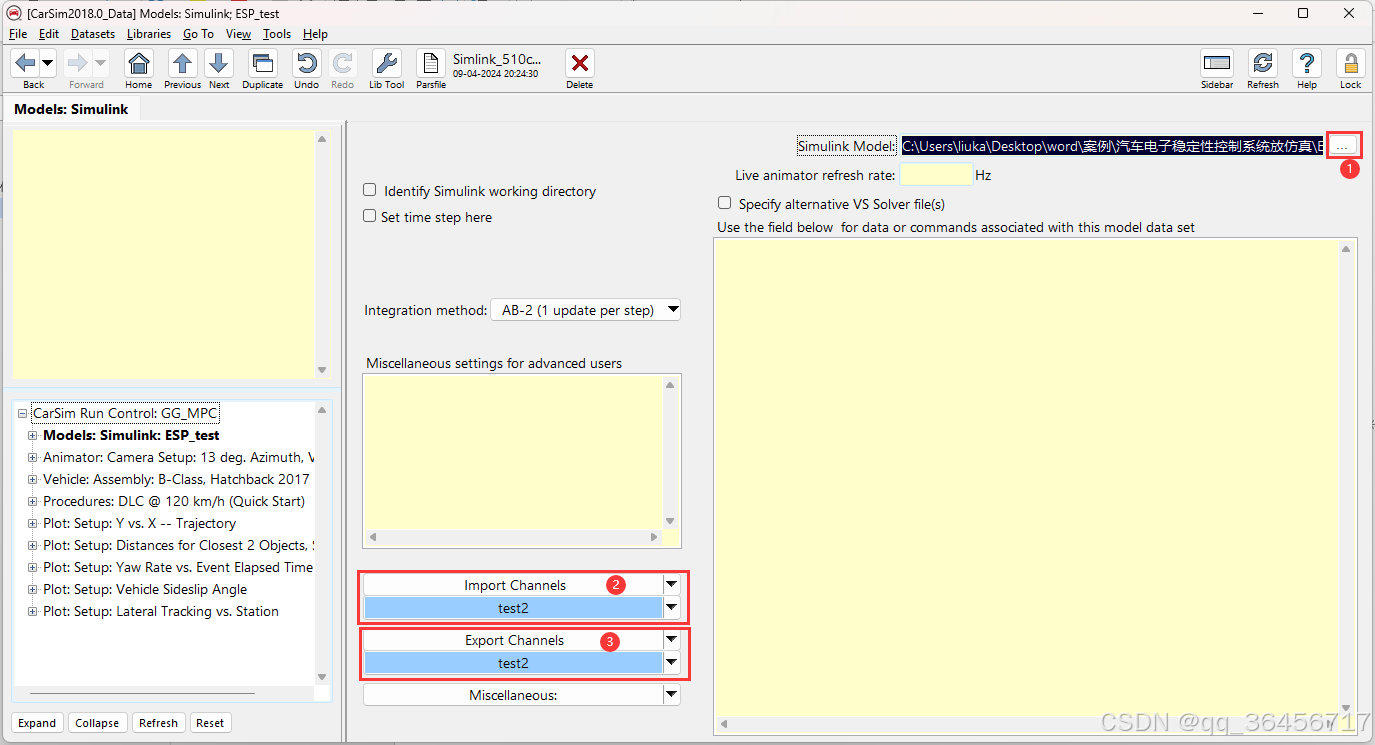
图 5
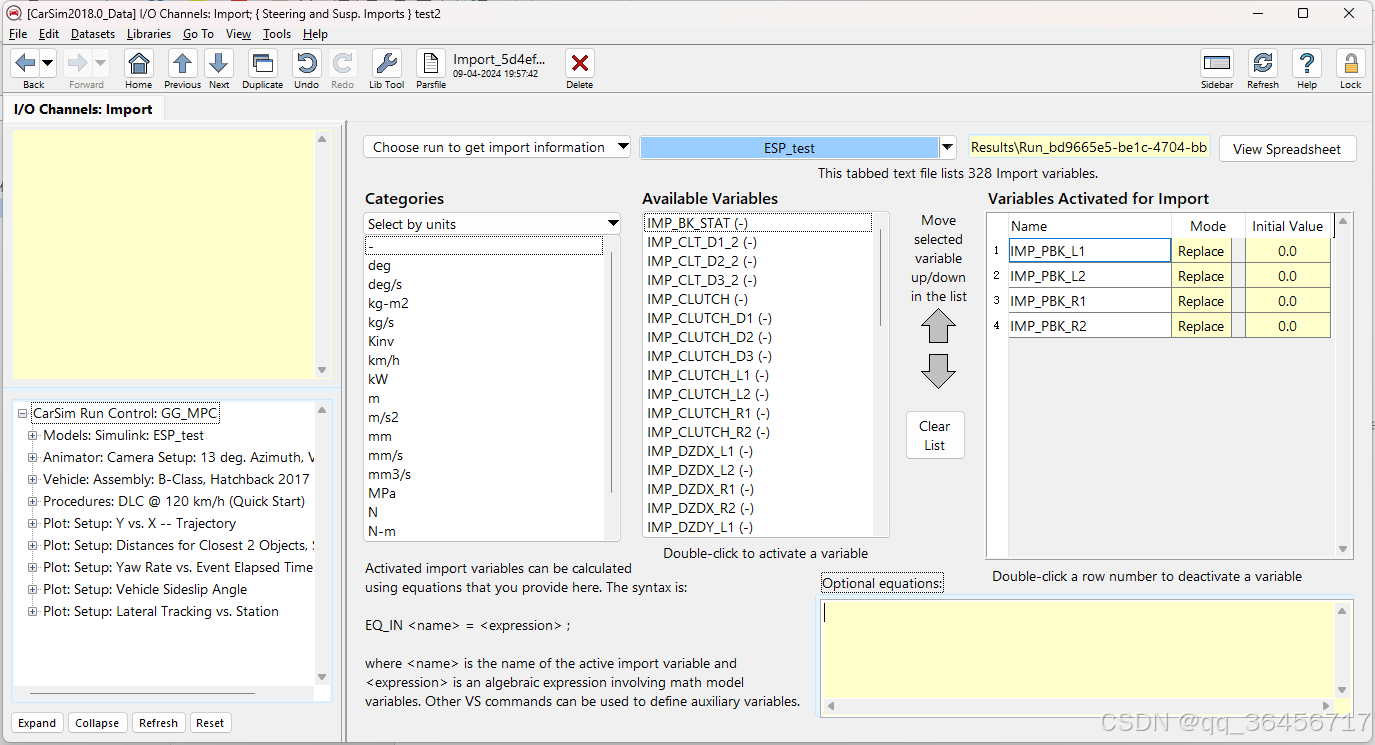
图 6
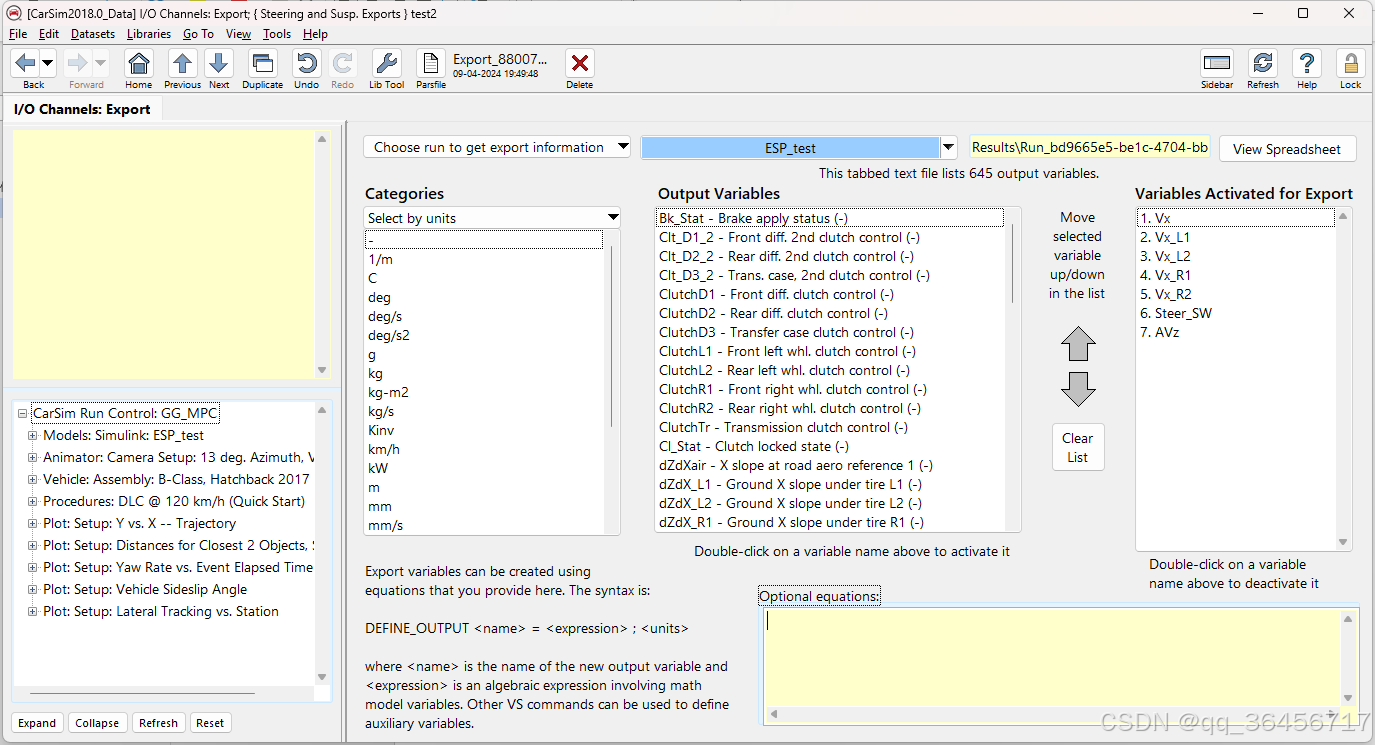
图 7
- 返回主菜单,点击Send to Simulink,打开Simulink模型,点击运行,如图8。
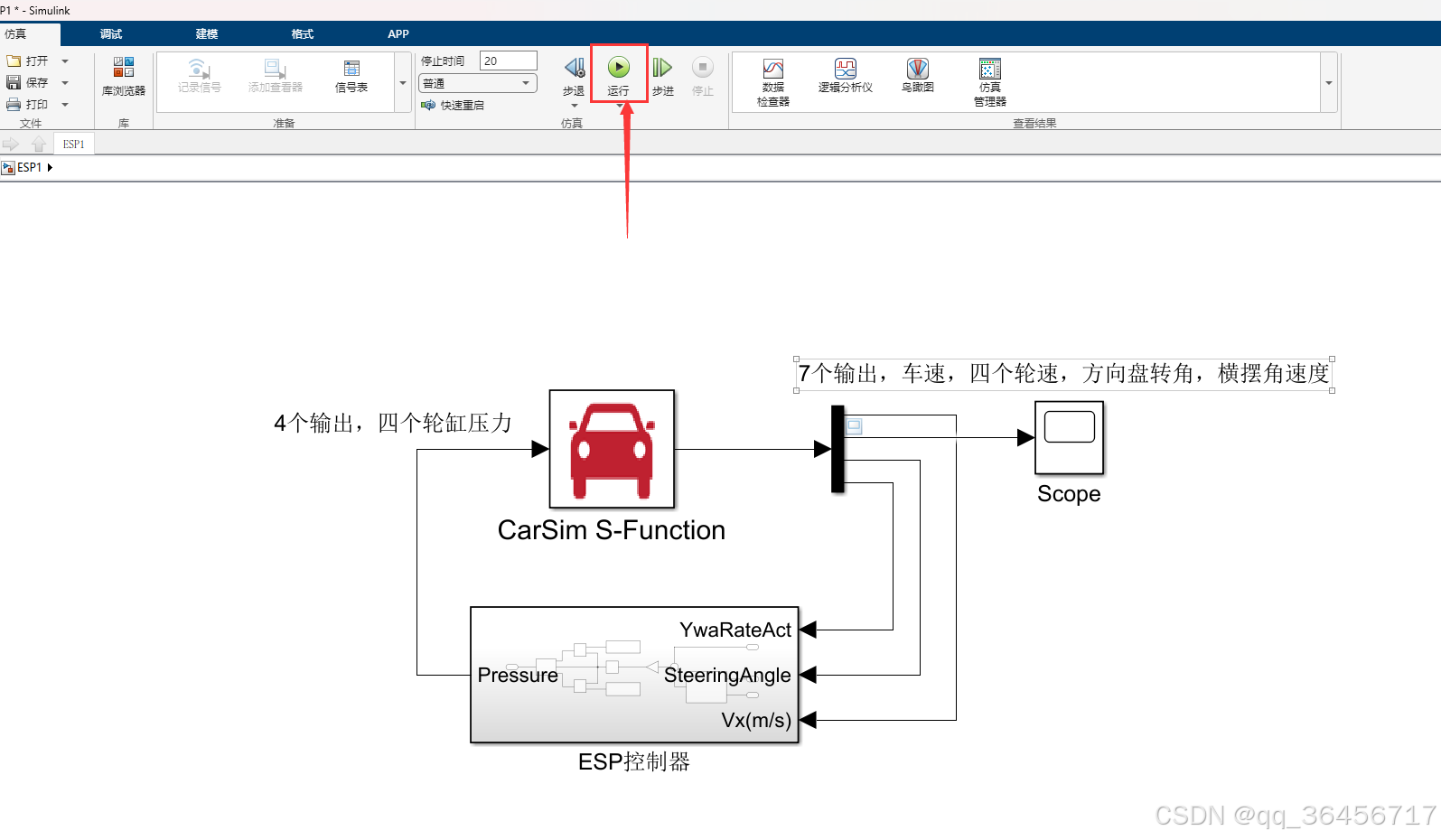
图 8
- 如需对参数进行修改,点击模型资源管理器,点击Model Workspace,可对参数值进行修改。
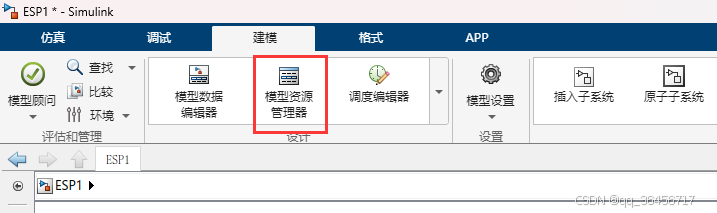
图 9
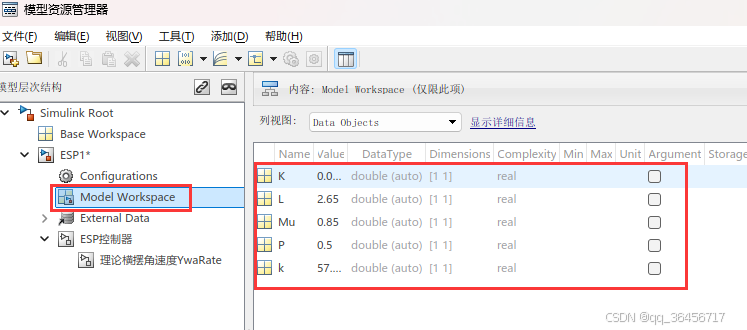
图 10


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









