







目录
前言
📅大四是整个大学期间最忙碌的时光,一边要忙着备考或实习为毕业后面临的就业升学做准备,一边要为毕业设计耗费大量精力。近几年各个学校要求的毕设项目越来越难,有不少课题是研究生级别难度的,对本科同学来说是充满挑战。为帮助大家顺利通过和节省时间与精力投入到更重要的就业和考试中去,学长分享优质的选题经验和毕设项目与技术思路。
🚀对毕设有任何疑问都可以问学长哦!
选题指导:
大家好,这里是海浪学长毕设专题,本次分享的课题是
🎯基于深度学习的台球挥杆训练辅助系统
课题背景和意义
台球是一项受欢迎的室内运动,但其技术要求高且难以掌握。对于初学者来说,熟练掌握挥杆技巧是进一步提高的关键。然而,传统的挥杆训练方法往往依赖于教练的指导和个人经验,限制了学习的效果和效率。基于深度学习的台球挥杆训练辅助系统的研究具有重要的意义。该系统结合了深度学习和计算机视觉技术,能够分析和识别球杆的运动轨迹,并提供实时的反馈和指导,帮助学习者改进挥杆技巧。这不仅可以提高学习者的训练效果,还可以降低学习的门槛,使更多的人能够享受到台球运动的乐趣。
实现技术思路
一、算法理论基础
1.1 深度学习
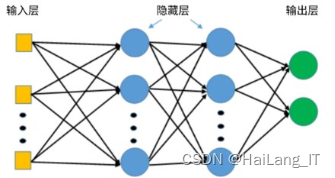
深度学习中的卷积神经网络(CNN)的确是一种受人类视觉系统启发的模型,它采用了分层处理的方式来逐渐抽象和提取图像的特征。CNN的结构包括卷积层、池化层和全连接层等关键组件。
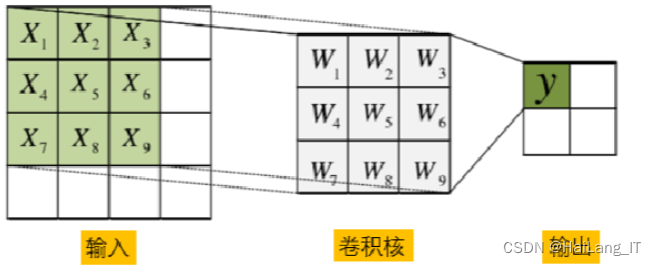
卷积层是CNN的核心组成部分,通过使用卷积核在输入的图像上进行滑动并进行矩阵乘法运算,来提取图像的特征信息。卷积核的大小和数量可以根据需要进行调整,以捕捉不同尺度和类型的特征。卷积层的作用是局部感知图像的特征,并通过多个卷积核的组合来提取图像的多个特征图。
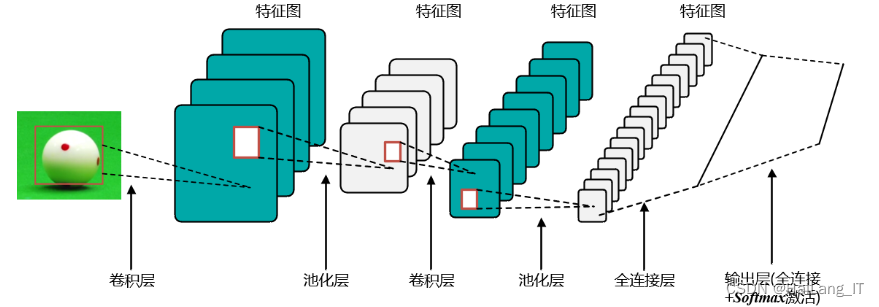
池化层通常紧随卷积层之后,其目的是通过降低特征图的空间分辨率来获得空间不变性的特征。最常见的池化策略是最大池化和均值池化。最大池化选择子矩阵内的最大值作为池化后的值,而均值池化则计算子矩阵内元素的平均值。池化操作可以减少特征的维度,并且具有一定的平移和尺度不变性。
全连接层通常位于卷积层之后,它将卷积层的输出数据映射到输出空间,实现特征向目标类别的转化。全连接层的主要作用是将特征图扁平化为一维向量,以便后续的处理。全连接层起到连接、整合和映射的关键作用,为深度学习任务提供了强大的学习能力。

这些组件相互连接并按顺序排列,形成了一个完整的卷积神经网络。它们在处理图像数据时,通过多个卷积层的堆叠,逐渐提取和学习更高级别的特征,从而实现有效的图像识别和分类任务。
1.2 目标检测算法
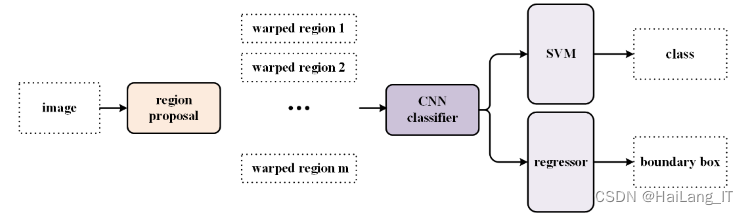
RCNN是第一个将卷积神经网络应用于目标检测的深度学习模型。它采用多阶段检测流程,包括目标候选框产生和候选框分类两个阶段。RCNN具有较高的检测精度,但计算量大,占用内存多。
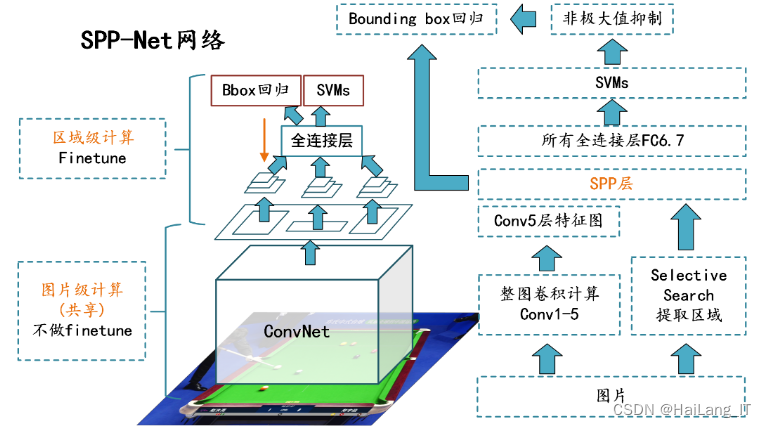
SPP-Net通过引入空间金字塔池化策略,可以处理不同输入尺寸的图像并生成相同大小的输出。SPP-Net避免了将候选区域重复输入到卷积神经网络中,提高了运行速度,并且性能优于RCNN。
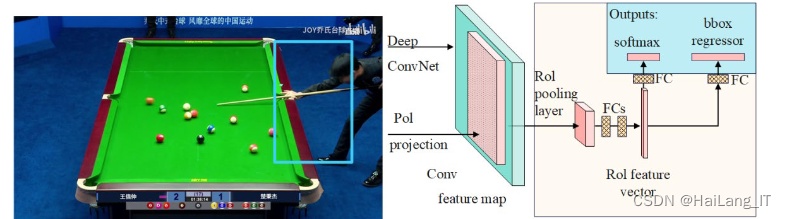
Faster R-CNN是一种进一步改进的目标检测算法,它采用更快的方式生成候选框,并在整张图像上运行卷积神经网络以产生特征图。Faster R-CNN引入了RoIPooling层来解决不同大小的候选框的问题,并使用log损失和Smooth L1损失作为损失函数。Faster R-CNN实现了端到端的训练和检测过程,并在检测准确性和速度方面取得了显著的提升。
双阶段目标检测算法如RCNN、SPP-Net和Faster R-CNN在检测准确性和精度方面表现出较高的水平,但计算代价较高,训练时间较长,不适合实时应用
二、 数据集
2.1 数据集
在数据采集过程中,我遵循了安全操作和实验室规范,确保了数据的准确性和可靠性。通过自制数据集,我为基于深度学习的台球挥杆训练辅助系统的研究提供了有力的支持,并为该领域的发展做出了积极贡献。这个自制的数据集包含了大量的挥杆场景,涵盖了不同技术水平和挥杆风格的玩家。这样的数据集能够提供更准确、可靠的数据,为挥杆训练系统的研究和改进提供了重要的资源。通过这个数据集,研究者们可以深入分析挥杆动作的特征和规律,探索有效的训练策略和个性化指导方法。相信这个自制数据集将为基于深度学习的台球挥杆训练辅助系统的发展和推广提供有力的支持,为台球运动的普及和提高技术水平做出积极贡献。

2.2 数据增强
数据增强是一种通过对原始数据进行各种操作,生成新的训练样本的方法,用于增加数据集的多样性和丰富性。通过数据增强可以提高模型的泛化能力,减少过拟合的发生。
import imgaug.augmenters as iaa
from PIL import Image
# 原始图像路径
image_path = 'path/to/image.jpg'
# 读取图像
image = Image.open(image_path)
# 定义数据增强操作
augmenter = iaa.Sequential([
iaa.Fliplr(0.5), # 水平翻转概率为0.5
iaa.GaussianBlur(sigma=(0, 3.0)), # 高斯模糊
iaa.Affine(rotate=(-45, 45)), # 旋转角度范围为-45到45度
])
# 对图像进行数据增强
augmented_image = augmenter(image=image)
# 显示增强后的图像
augmented_image.show()将台球关键目标数据集随机按照一定比例划分为训练集、验证集、测试集。训练集是用于训练模型的数据子集,这部分数据将被用于调整模型参数,以便模型能够学习到数据中的潜在特征。验证集用于在训练过程中评估模型的性能,并用于调整超参数和检测过拟合现象。测试集用于在模型训练和验证完成后,评估模型在未知数据上的性能,从而提供模型在实际应用场景中的预期效果的相关信息。
目标检测模型的训练过程中,两个关键的损失函数是边界框损失和目标存在性损失。这些损失函数帮助衡量模型预测的边界框与实际边界框之间的差异,以及模型对目标对象存在性的准确预测。改进的YOLO v5模型使用了CIOU损失函数,它考虑了边界框的重叠区域、中心点的距离和宽高比的一致性,从而提高了模型的收敛能力和性能。通过选择适当的损失函数,可以改进目标检测模型的性能,使其更准确地预测边界框和目标存在性。
三、实验及结果分析
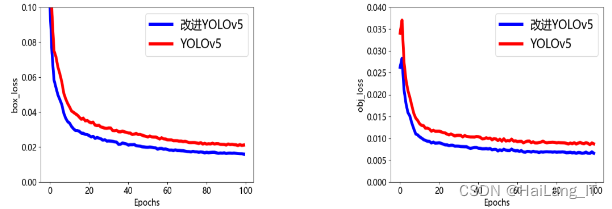
目标检测模型的训练过程中,两个关键的损失函数是边界框损失和目标存在性损失。这些损失函数帮助衡量模型预测的边界框与实际边界框之间的差异,以及模型对目标对象存在性的准确预测。改进的YOLO v5模型使用了CIOU损失函数,它考虑了边界框的重叠区域、中心点的距离和宽高比的一致性,从而提高了模型的收敛能力和性能。通过选择适当的损失函数,可以改进目标检测模型的性能,使其更准确地预测边界框和目标存在性。这种改变在训练过程中产生了积极的影响,使得模型在较短的时间内达到了更好的收敛状态,从而提高了模型的性能和准确度。
通过分析训练集和验证集生成的日志文件绘制的Precision曲线,可以观察到模型在不同轮次下的精确度。Precision是一个重要的指标,用于评估模型在预测时的可靠性。通过对YOLO v5模型进行改进,成功地提高了模型的学习能力,使其在各种情况下都能提供更准确的预测。

相关代码示例:
import pandas as pd
import matplotlib.pyplot as plt
# 从日志文件中读取数据
log_file = 'path_to_log_file.txt' # 日志文件路径
data = pd.read_csv(log_file, delimiter='\t')
# 提取Precision数据
precision = data['Precision']
# 绘制Precision曲线
epochs = range(1, len(precision) + 1)
plt.plot(epochs, precision, label='Precision')
# 设置图表标题和坐标轴标签
plt.title('Precision Curve')
plt.xlabel('Epochs')
plt.ylabel('Precision')
# 显示图例
plt.legend()
# 显示图表
plt.show()最后
我是海浪学长,创作不易,欢迎点赞、关注、收藏。
毕设帮助,疑难解答,欢迎打扰!

















 1178
1178

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









