






目录
前言
📅大四是整个大学期间最忙碌的时光,一边要忙着备考或实习为毕业后面临的就业升学做准备,一边要为毕业设计耗费大量精力。近几年各个学校要求的毕设项目越来越难,有不少课题是研究生级别难度的,对本科同学来说是充满挑战。为帮助大家顺利通过和节省时间与精力投入到更重要的就业和考试中去,学长分享优质的选题经验和毕设项目与技术思路。
🚀对毕设有任何疑问都可以问学长哦!
选题指导:
大家好,这里是海浪学长毕设专题,本次分享的课题是
🎯基于机器学习的蔬菜生长状态检测方法研究
课题背景和意义
随着全球人口的增长和对食品安全的关注,农业生产面临着越来越大的压力。传统的蔬菜种植管理方法往往依赖于经验,难以实时监测和评估蔬菜的生长状态。这导致了资源的浪费和产量的降低。通过实时监测蔬菜的生长状态,能够及时识别生长问题,如病虫害、缺水或营养不足,从而优化管理措施,减少资源浪费。对蔬菜生长状态的准确检测有助于及时发现潜在的安全隐患,确保所生产的食品符合安全标准,提高消费者的信任感。结合机器学习技术,构建智能化的农业管理系统,不仅可以提升蔬菜种植的科学性和精准性,还能推动农业的数字化转型。
实现技术思路
一、 算法理论基础
1.1 卷积神经网络
卷积神经网络(CNN)是一种深度学习模型,广泛应用于计算机视觉任务,包括图像分类、目标检测和图像分割等。在蔬菜生长状态检测系统中,CNN能够通过分析蔬菜图像,自动提取和识别生长状态特征,从而实现对蔬菜健康状况的实时监测和评估。原理结构组成:
- 输入层:接收图像数据,通常为蔬菜的高分辨率图像。输入图像的尺寸通常会被调整为固定大小(例如224x224)。
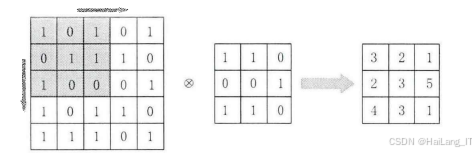
- 卷积层:通过卷积操作提取图像特征。每个卷积层使用多个卷积核(滤波器)在输入图像上滑动,生成特征图。卷积层能够捕捉局部特征,如边缘、纹理和形状。
- 激活层:通常使用ReLU(Rectified Linear Unit)激活函数,引入非线性特性,使模型能够学习更复杂的特征。
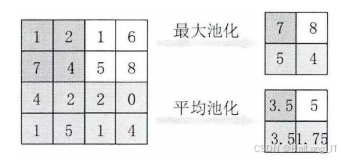
- 池化层:通过下采样(如最大池化或平均池化)减少特征图的尺寸,降低计算复杂度,同时保留重要特征。这有助于提高模型的鲁棒性,减少过拟合。
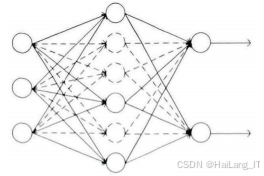
- 全连接层:在经过多个卷积和池化层后,特征图被展平并输入到全连接层,进行最终的分类或回归任务。在蔬菜生长状态检测中,最终的输出可以是健康、病虫害或缺水等状态的分类结果。
- 输出层:根据任务需求,输出层可以采用Softmax激活函数进行多类分类,或使用其他激活函数进行回归分析。
在模型训练过程中,由于数据量较小或神经网络过于复杂,容易出现过拟合现象。过拟合表现为训练集损失不断降低,而测试集损失先下降后上升。为了解决这一问题,常用的防过拟合方法包括Dropout和正则化。Dropout算法通过按一定比例随机删除全连接层中的一些神经元,减少神经节点的数量及其对应参数,从而降低网络结构的复杂度,减少参数数量,增强模型的泛化能力。
1.2 图象去噪
图像去噪是一种提高图像质量的重要方法,尤其在复杂背景下,背景噪声会影响前景提取。常用的去噪方法包括线性滤波和非线性滤波。线性滤波方法如均值滤波和高斯滤波,虽然简单,但可能丢失重要的图像信息,如边缘;高斯滤波在一定程度上减少了信息损失。非线性滤波方法如中值滤波能有效处理椒盐噪声,边缘保留能力优于线性滤波,但仍会导致边缘模糊。双边滤波在高斯滤波的基础上改进,能较好地保留边缘信息,同时减少非边缘噪声。均值漂移作为一种聚类方法,通过滑动窗口计算像素均值,能较好地保留边缘信息,适合用于图像分割。综合使用不同滤波器可以发挥各自的优势,从而提高去噪效果。
1.3图像分割
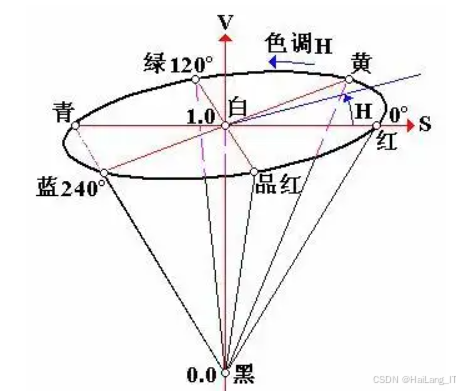
基于HSV空间的颜色分割方法是一种通过色相、饱和度和明度三个维度对图像进行处理的技术。HSV空间更符合人类的视觉感知,使得颜色的区分更加直观和自然。在该方法中,首先将RGB图像转换为HSV色彩空间,然后通过设定特定的色相和饱和度范围,能够有效地提取出目标颜色,如成熟或病变的蔬菜。
基于Lab空间的K-means分割方法是一种利用Lab色彩空间进行图像颜色聚类的技术。Lab空间包含了人眼可感知的所有颜色,并在光照变化下表现出较强的鲁棒性。在该方法中,首先将RGB图像转换为Lab色彩空间,然后应用K-means算法对图像中的颜色进行聚类,以识别和分割出不同的颜色区域。该方法能够有效处理复杂背景,精准区分蔬菜的不同生长状态,从而为后续的分析和决策提供可靠的数据支持。
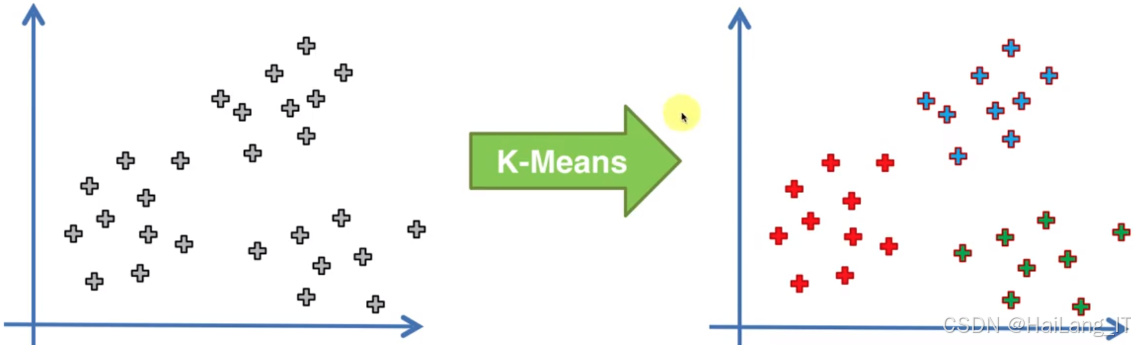
基于HSV空间的颜色分割方法直观且易于调整,适合快速识别特定颜色,但在复杂背景下可能受到干扰,导致分割效果下降。相比之下,基于Lab空间的K-means分割方法具有更强的鲁棒性和颜色精确性,能够有效应对光照变化和背景复杂性,适合用于蔬菜不同生长状态的检测。对于蔬菜生长状态检测算法,Lab空间的K-means分割方法更为适合,因其能够准确处理细微的颜色差异,并有效聚类不同的生长状态,满足实际应用需求。
相关代码示例:
import cv2
import numpy as np
import matplotlib.pyplot as plt
# 读取图像
image = cv2.imread('path/to/your/image.jpg')
image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB) # 转换为RGB格式
# 将图像转换到Lab色彩空间
lab_image = cv2.cvtColor(image, cv2.COLOR_RGB2Lab)
# 将图像数据转换为二维数组
pixel_values = lab_image.reshape((-1, 3))
pixel_values = np.float32(pixel_values)
# 定义K-means聚类参数
k = 3 # 聚类中心数量
criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 100, 0.2)
_, labels, centers = cv2.kmeans(pixel_values, k, None, criteria, 10, cv2.KMEANS_RANDOM_CENTERS)
# 将中心点转换为uint8类型
centers = np.uint8(centers)
# 将标签重新调整为原图像的形状
segmented_image = centers[labels.flatten()]
segmented_image = segmented_image.reshape(image.shape)
二、 数据集
2.1 数据集
由于现有的数据集无法满足需求,我决定亲自进行蔬菜生长状态检测数据集的制作。为此,我在不同的环境和光照条件下,系统性地拍摄了多种蔬菜的生长状态,包括健康、病虫害、缺水等不同情况。我选择在果园、温室和农田等真实场景中进行拍摄,以确保数据的多样性和真实性。通过这种方式,我能够捕捉到丰富的视觉特征,为后续的生长状态分析提供准确的数据基础。
在数据采集完成后,我对拍摄的图像进行详细的标注,以确保每个样本的生长状态信息准确无误。我使用专业的标注工具,对每张图像中的蔬菜进行分类,标注出其健康状况及相关特征。这一过程要求高度的准确性,以便为后续的模型训练提供高质量的标注数据。我特别注意到不同生长状态之间的细微差异,以确保模型能够学习到有效的特征,从而提高检测的准确性。
2.2 数据增强
数据增强是一种提高模型泛化能力的技术,通过对原始图像进行多种变换(如旋转、缩放、翻转、裁剪等),生成多样化的训练样本。这种方法能够有效扩展数据集,减少过拟合的风险,使模型在不同条件下具备更强的鲁棒性。在蔬菜生长状态检测中,数据增强可以帮助模型更好地适应不同光照、角度和背景,提升检测的准确性。
相关代码示例:
import torch
from torchvision import datasets, transforms
from torch.utils.data import DataLoader
# 定义数据增强的转换
data_transforms = transforms.Compose([
transforms.RandomRotation(degrees=15), # 随机旋转
transforms.RandomResizedCrop(size=224, scale=(0.8, 1.0)), # 随机裁剪
transforms.RandomHorizontalFlip(), # 随机水平翻转
transforms.ColorJitter(brightness=0.2, contrast=0.2, saturation=0.2, hue=0.2), # 颜色抖动
transforms.ToTensor(), # 转换为Tensor
transforms.Normalize(mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225]) # 归一化
])
# 加载数据集
train_dataset = datasets.ImageFolder(root='path/to/your/dataset/train', transform=data_transforms)
train_loader = DataLoader(dataset=train_dataset, batch_size=32, shuffle=True)
# 示例用法
for images, labels in train_loader:
print(images.shape, labels.shape) # 打印图像和标签的形状
break # 仅打印一次输出三、实验及结果分析
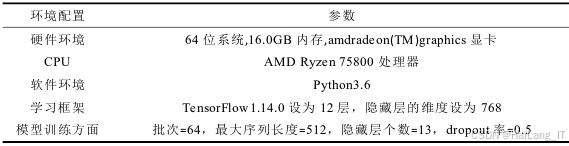
3.1 实验环境搭建
深度学习框架为构建、训练、优化和推理深度神经网络提供了必要的基础工具,使开发者能够更高效地进行相关工作。这些框架不仅简化了复杂的计算过程,还提供了丰富的功能和灵活的接口,帮助开发者快速实现各种深度学习算法。在众多深度学习框架中,PyTorch因其高度的扩展性和可移植性而受到广泛欢迎,尤其在学术研究和工业应用中表现出色。它的动态计算图特性使得模型的调试和修改变得更加直观和方便,同时,PyTorch拥有一个活跃的开发者社区,提供了大量的资源和支持,极大地推动了深度学习的研究和应用。
3.2 模型训练
在深度学习网络的数据预处理阶段,首先将采集到的图像统一设置为80x80像素大小,以便进行后续的训练和测试。每张图像都被分配相应的分类标签,这些预处理的图像将用于生成新的数据集。尽管这种操作可能会牺牲一些图像质量,但它显著减少了训练时间。生成的新图像与输入图像大小相同,并保持对应的标签,从而为模型训练提供一致性和效率。
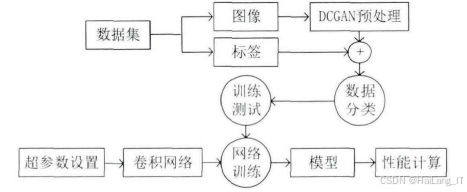
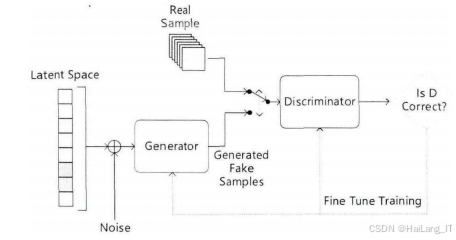
生成对抗网络(GAN)模型由两个主要网络组成:生成网络和判别网络。生成器的任务是根据训练数据生成新的、看起来真实的假数据实例,而判别器则试图区分真实数据与生成器所产生的虚假数据。通过这种对抗过程,生成器不断改进其生成的样本质量,以欺骗判别器,而判别器则在不断学习如何更准确地区分真实和虚假的数据,从而推动整个系统的性能提升。
代码示例:
import torch
import torch.nn as nn
# 简化生成器
class Generator(nn.Module):
def __init__(self):
super().__init__()
self.model = nn.Sequential(nn.Linear(100, 256), nn.ReLU(), nn.Linear(256, 28*28), nn.Tanh())
def forward(self, z):
return self.model(z)
# 简化判别器
class Discriminator(nn.Module):
def __init__(self):
super().__init__()
self.model = nn.Sequential(nn.Linear(28*28, 256), nn.LeakyReLU(0.2), nn.Linear(256, 1), nn.Sigmoid())
def forward(self, img):
return self.model(img)
# 训练过程(简化版)
G, D = Generator(), Discriminator()
optimizer_G, optimizer_D = torch.optim.Adam(G.parameters(), lr=0.0002), torch.optim.Adam(D.parameters(), lr=0.0002)
criterion = nn.BCELoss()
for epoch in range(50):
real_imgs = torch.randn(64, 28*28) # 假设真实图像
z = torch.randn(64, 100) # 随机噪声
fake_imgs = G(z)
# 判别器训练
D.zero_grad()
loss_D = criterion(D(real_imgs), torch.ones(64, 1)) + criterion(D(fake_imgs.detach()), torch.zeros(64, 1))
loss_D.backward()
optimizer_D.step()
# 生成器训练
G.zero_grad()
loss_G = criterion(D(fake_imgs), torch.ones(64, 1))
loss_G.backward()
optimizer_G.step()最后
我是海浪学长,创作不易,欢迎点赞、关注、收藏。
毕设帮助,疑难解答,欢迎打扰!


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









