







目录
前言
📅大四是整个大学期间最忙碌的时光,一边要忙着备考或实习为毕业后面临的就业升学做准备,一边要为毕业设计耗费大量精力。近几年各个学校要求的毕设项目越来越难,有不少课题是研究生级别难度的,对本科同学来说是充满挑战。为帮助大家顺利通过和节省时间与精力投入到更重要的就业和考试中去,学长分享优质的选题经验和毕设项目与技术思路。
🚀对毕设有任何疑问都可以问学长哦!
选题指导:
大家好,这里是海浪学长毕设专题,本次分享的课题是
🎯基于深度学习的交通违法行为检测系统
课题背景和意义
交通违章是城市交通安全的重要隐患,直接关系到行人和驾驶员的生命安全。随着智能交通系统的发展,利用计算机视觉和深度学习技术对交通违章行为进行检测和预警,能够有效降低交通事故的发生率。通过构建高效的检测系统,不仅可以提升城市交通管理的智能化水平,还能为行人和驾驶员提供更安全的通行环境。
实现技术思路
一、算法理论基础
1.1 图像处理
在图像处理研究中,关注的重点是图像中的特定部分,通常被称为目标或对象。为了有效地辨识和分析这些目标,需要将相关区域分离出来,并对其进行特征提取和测量。图像分割技术的核心在于将图像划分为互不重叠的区域,以便提取感兴趣的目标。有效的图像处理任务不仅包括目标的分析与理解,还涉及图像分析和理解的过程,前者主要是检测和测量图像中目标以获得客观信息,后者则是研究目标的性质及其相互联系,从而形成对原始场景的解释。
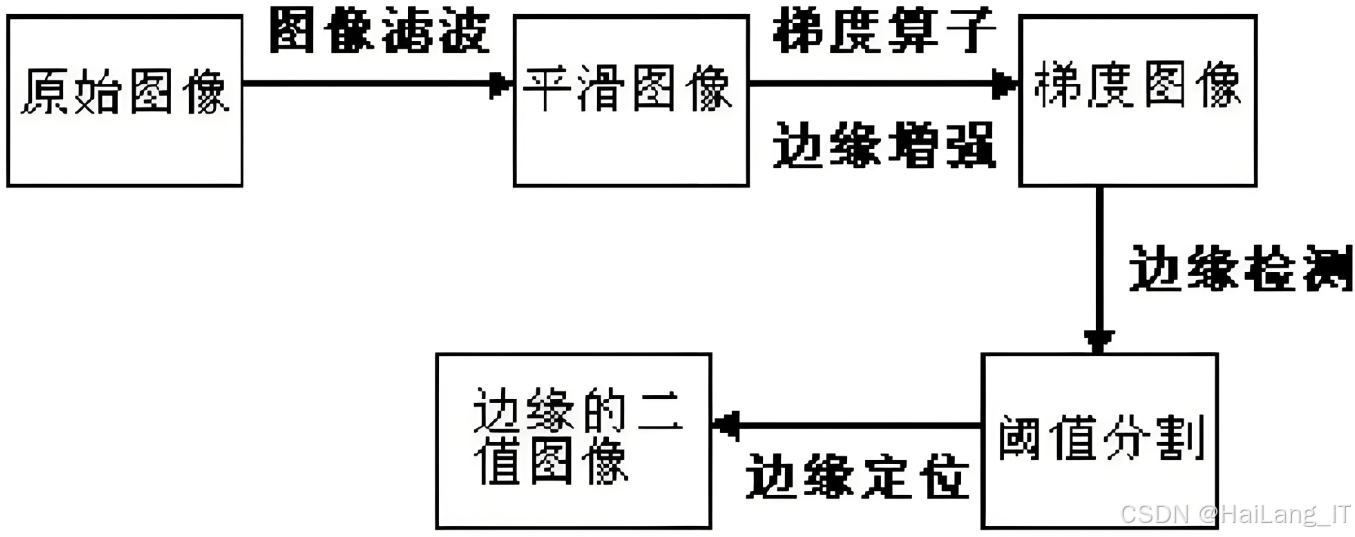
图像分析的基本步骤包括分割区域、提取特征、识别内容和得出结论。图像分割的效果直接影响分析结果,经典的图像分割算法通常基于区域边界的灰度不连续性或区域内灰度的相似性进行处理。边缘是图像中灰度显著变化的区域,对目标轮廓及信息提取至关重要。边缘大致分为阶跃状和屋顶状,通常通过微分算子来进行检测,以增强边缘特征。
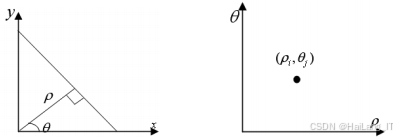
边缘像素的连接可以通过局部处理和整体处理两种方法实现。局部处理依赖于边缘像素之间的相似性,通过分析每个像素的邻域特征来连接相似的边缘像素。整体处理则利用图像的全局特性,常采用霍夫变换来连接不连续的边缘像素,形成闭合的边界曲线。霍夫变换通过假设已知区域形状,将不连续的边缘点连接,以实现更准确的边界检测。
数学形态学提供了一种基于形状的处理方法,特别适用于机器视觉中的识别处理,其并行化和快速性使其在硬件实现中颇受青睐。数学形态学的核心在于设计一套概念和变换运算,用于描述图像的基本特征或结构,进而揭示图像中各个像素或部分之间的关系。所有变换运算都是定义在集合上的,集合代表二值或灰度图像中的形状。在高维欧式空间中,集合还可以表示图像的颜色,因此集合成为数学形态学的基本语言。该领域的数学基础主要依赖于集合论。数学形态学的基本运算包括膨胀、腐蚀、开启和闭合四种。这些基本运算可以组合和推导出各种数学形态学的运算方法。运算对象为集合,通常需要一个图像集合和一个结构元素集合,结构元素定义了形态操作所用的领域形状和大小,具有任意的维数和大小。通过对这四种基本运算的理解,可以进一步应用数学形态学进行复杂的图像处理和分析。

1.2 目标检测算法
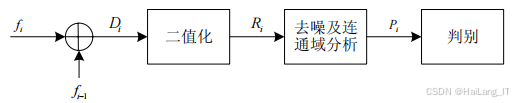
基于帧间差分的运动目标检测算法是一种广泛应用于动态场景中实时目标检测的有效方法。该算法通过对连续帧之间的差异进行分析,能够快速识别出图像中运动的目标。其核心思想是将当前帧与前一帧进行比较,通过计算像素值的变化来提取运动信息。帧间差分法因其短间隔的帧间差分和相对缓慢的背景变化,对动态环境具有较强的自适应性,且处理速度快,能够实现实时检测。此外,该方法对同色物体不敏感,能够有效解决阴影问题。然而,帧间差分法常导致检测对象被分割成多个小块,从而造成运动信息的不完整。因此,在帧间差分的基础上,采用小块合并处理以提高目标检测的完整性和准确性。
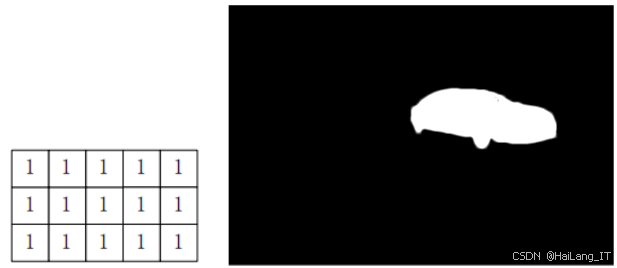
对差分图像进行闭合运算是一个重要的形态学处理步骤,旨在填补图像中的小孔洞和连接断裂的轮廓。闭合运算通过先应用膨胀操作,再进行腐蚀操作,有效地平滑物体边界,消除小的噪声和不连续部分,从而增强目标的连通性。这一过程在运动目标检测中尤为关键,因为它能够改善目标轮廓的完整性,使得检测结果更加准确和可靠。通过闭合运算,差分图像中的目标区域得以清晰地呈现,从而提高后续分析和处理的效果。开启运算是在两帧差分图像经过“与”运算后进行的,旨在去除噪声并平滑目标轮廓。通过“与”运算得到的结果包含了第i帧的运动图像以及因背景扰动引入的杂散噪声。为了有效去噪,选择特定的结构元进行开启运算,能够清除与结构元不匹配且面积小于结构元的细小突出物,从而在一定程度上滤除噪声的影响。
通过设定运动物体的宽度和面积门限值,可以有效滤除不符合特定形状的运动物体。采用宽度门限主要是为了去除那些狭长且沿公路方向行进的物体,而使用面积门限则主要针对垂直于公路方向行进的狭长物体。这种基于形状特征的过滤机制有助于提高检测的准确性,确保最终提取的运动目标符合预期的交通场景特征,从而提升车辆识别的效率和可靠性。
二、 数据集
2.1 数据集
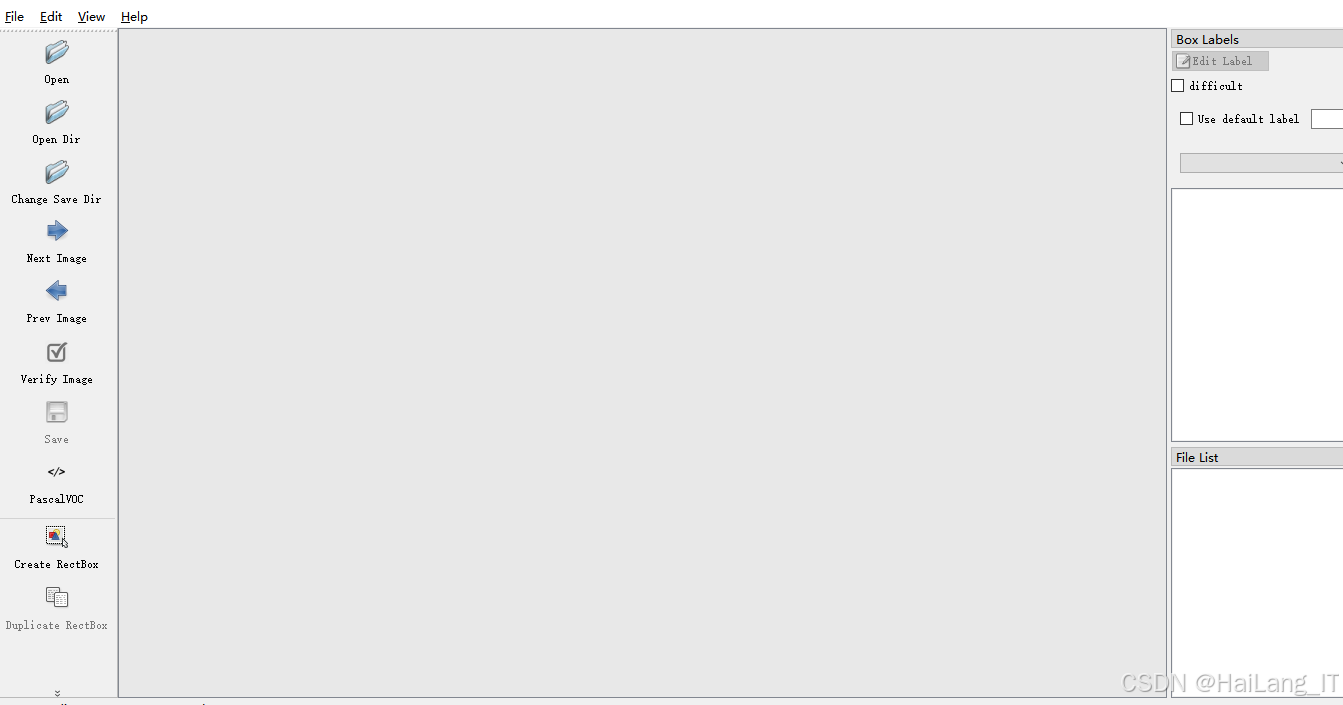
车辆违章(如车辆闯红灯)数据集的制作选用了自主拍摄和互联网采集相结合的方法。自主拍摄通过在不同交通场景和时间段获取真实的车辆违章行为图像,确保数据的多样性和现实性;而互联网采集则利用公开的交通监控视频和图片资源,进一步丰富数据集的内容。通过labeling,标注人员对每一帧图像中的车辆和违章行为进行识别和标注,确保每个样本都能准确反映出目标行为。这一过程不仅包括对车辆的定位,还涵盖了对违章行为的分类,如闯红灯、逆行等,以便为后续的模型训练提供准确的标注信息。
2.2 数据扩充
将收集到的图像数据分为训练集、验证集和测试集,以确保模型的泛化能力和性能评估的准确性。此外,通过数据扩展技术,如图像旋转、缩放、翻转等,对原始图像进行增强,进一步增加数据集的规模和多样性。
三、实验及结果分析
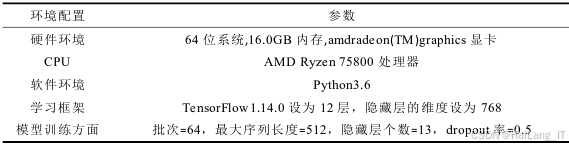
3.1 实验环境搭建
3.2 模型训练
收集车辆违章行为的图像数据,采用自主拍摄和互联网采集的方式,确保数据的多样性和代表性。然后,使用标注工具对图像进行标注,明确识别出车辆及其违章行为。最后,对数据进行预处理,包括图像尺寸调整、归一化处理等,以适应模型的输入要求。
import cv2
import os
# 数据预处理示例
def preprocess_images(image_folder, target_size):
images = []
for filename in os.listdir(image_folder):
img = cv2.imread(os.path.join(image_folder, filename))
img_resized = cv2.resize(img, target_size)
images.append(img_resized)
return images
# 调用预处理函数
processed_images = preprocess_images('data/images', (224, 224))选择适合的深度学习模型YOLOv5,进行微调,以便更快地适应车辆违章行为检测的任务。将准备好的数据集分为训练集和验证集。使用训练集对模型进行训练,优化其参数;同时,利用验证集来监控模型的性能,以防止过拟合。训练过程中可以使用数据增强技术,以提升模型的鲁棒性和泛化能力。
from yolov5 import YOLOv5
# 加载预训练模型
model = YOLOv5('yolov5s.pt') # 加载YOLOv5的轻量级模型使用测试集对模型进行评估,计算准确率、召回率和F1分数等指标,以评估模型在实际应用中的表现。根据评估结果,进行模型优化以提高性能。可以尝试调整超参数、增加训练数据、使用不同的模型架构或集成多种模型等方法。持续的优化过程将有助于提升模型的准确性和稳定性,最终实现高效的车辆违章行为检测。
海浪学长项目示例:




最后
我是海浪学长,创作不易,欢迎点赞、关注、收藏。
毕设帮助,疑难解答,欢迎打扰!

















 2123
2123

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









