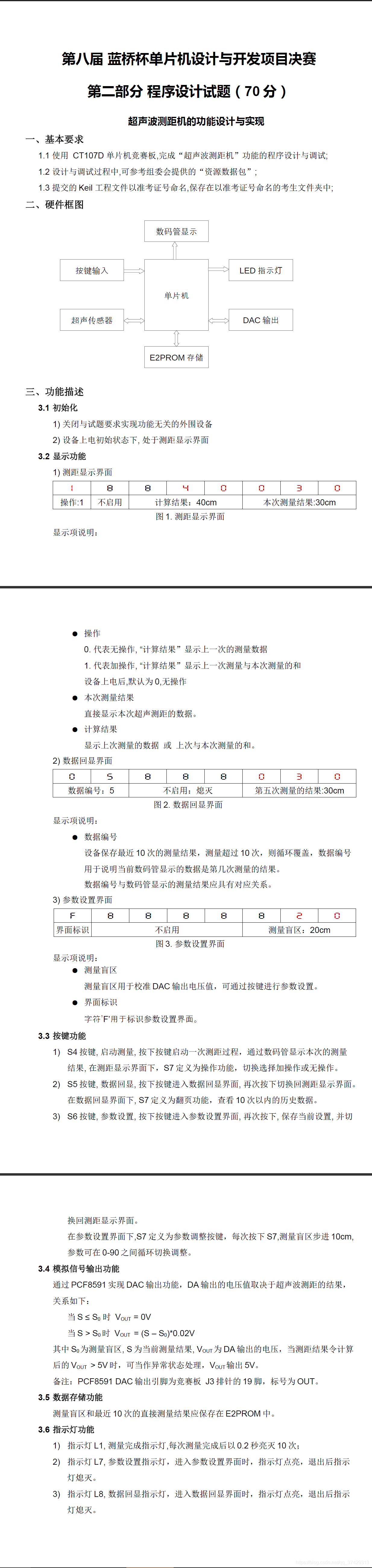
题目
文件树
代码
init.c
#include "init.h"
void Timer1Init(void)
{
AUXR |= 0x40;
TMOD &= 0x0F;
TL1 = 0x40;
TH1 = 0xA2;
TF1 = 0;
TR1 = 1;
ET1 = 1;
EA = 1;
}
void SL(uchar _dev, uchar _data)
{
P0 = _data; SEL(_dev);
}
uchar FR(float _data, uchar _dig)
{
uint i = 1;
while(_dig--)
{
i = i * 10;
}
return((uint)_data/i%10);
}
void BF(uchar _0, uchar _1, uchar _2, uchar _3,
uchar _4, uchar _5, uchar _6, uchar _7)
{
buf[0] = _0; buf[1] = _1; buf[2] = _2; buf[3] = _3;
buf[4] = _4; buf[5] = _5; buf[6] = _6; buf[7] = _7;
}
void Run(t_delay* time)
{
if(time->cnt++ < time->max);
else
{
time->cnt = 0;
time->ok = 1;
}
}
void Delay14us()
{
unsigned char i;
_nop_();
_nop_();
i = 39;
while (--i);
}
void Sonic_T()
{
uchar i = 10;
while(i--)
{
P10 = 1;
Delay14us();
P10 = 0;
Delay14us();
}
}
void Sonic_R()
{
CH = 0; CL = 0;
Sonic_T();CR = 1;
while(!CF && P11);
CR = 0;
if(CF)
{
CF = 0;
preDistance = distance;
distance = maxDistance;
Adc_Read(0x43, dac_value );
}
else
{
uint tmpVal;
tmpVal = ((uint)CH << 8) | CL;
preDistance = distance;
if(tmpVal*0.017/12 > maxDistance)
{
dac_value = 0;
Adc_Read(0x43, dac_value );
distance = maxDistance;
}
else
{
uchar tmpVal;
distance = tmpVal*0.017/12;
tmpVal = (maxDistance - distance)*0.02*51;
if(distance > 5)
{
dac_value = 255;
Adc_Read(0x43, dac_value);
}
else
{
dac_value = tmpVal;
Adc_Read(0x43, dac_value);
}
}
}
}
uchar LedChange(uchar _data, uchar _dig, uchar _en)
{
if(_en == 0)
{
_data |= (1 << _dig);
}
else if(_en == 1)
{
_data &= ~(1 << _dig);
}
else
{
_data ^= (1 << _dig);
}
SL(4, _data);
return(_data);
}
uchar GetKey()
{
if(K1 == 0) return 7;
if(K2 == 0) return 6;
if(K3 == 0) return 5;
if(K4 == 0) return 4;
return 0;
}
void Print(uchar *string)
{
ES = 0;TI = 1;
printf("%s", string);
TI = 0; ES = 1;
}
uchar Check(uchar _data, uchar _dig)
{
return(!((_data >> _dig) & 1));
}
main.c
#include "init.h"
uchar ledData = 0xff;
enum{LED=4, EXT, SEL, CODE};
uchar buf[8];
uchar code CA[] = {0xc0, 0xf9, 0xa4, 0xb0, 0x99,
0x92, 0x82, 0xf8, 0x80, 0x90,
0xff, 0x8e};
uchar curDig = 0;
enum{D_DIS, D_BACK, D_SET}gloSta = D_DIS;
uchar key = 0, tmpKey = 0, keyCnt = 0;
enum{KS_GT, KS_AS, KS_WA}keyState = KS_GT;
t_delay delay_200 = {200, 0, 0};
t_delay delay_300 = {300, 0, 0};
t_delay delay_100 = {100, 0, 0};
float distance;
float preDistance;
float adcVal;
uchar caoZuo = 0;
uchar maxDistance = 20;
uchar pageCnt = 0;
uchar saveData[10];
uchar index = 0;
uchar revBuf[20];
uchar sonicok = 0;
uchar soniccnt = 0;
uchar dac_value = 0;
void Timer1Handle() interrupt 3
{
SL(CODE, 0xff); SL(SEL, 1 << curDig); SL(CODE, CA[buf[curDig]]);
curDig = (1 + curDig)%8;
switch(keyState)
{
case KS_GT:
keyCnt = 0; tmpKey = GetKey(); keyState = KS_AS;
break;
case KS_AS:
if(keyCnt++ < 10);
else if(tmpKey == GetKey())
{
if(key != tmpKey)
{
key = tmpKey;
keyState = KS_WA;
}
else
keyState = KS_GT;
}
else
keyState = KS_GT;
break;
}
Run(&delay_200);
if(delay_300.ok == 2)
{
Run(&delay_300);
}
Run(&delay_100);
}
void SensorProcess()
{
if(delay_200.ok == 1)
{
delay_200.ok = 0;
adcVal = Adc_Read(0x43, 250);
}
}
void DisProcess()
{
switch(gloSta)
{
case D_DIS:
if(caoZuo == 1)
{
BF(1, F_C, F_C, FR(preDistance, 1),FR(preDistance, 0),
FR(distance, 2),FR(distance, 1),FR(distance, 0));
}
else
{
float sum;
sum = preDistance + distance;
BF(1, F_C, F_C, FR(sum, 1),FR(sum, 0),
FR(distance, 2),FR(distance, 1),FR(distance, 0));
}
break;
case D_BACK:
BF(FR(pageCnt+1, 1), FR(pageCnt+1, 0), F_C,F_C,F_C,
FR(saveData[pageCnt], 2),FR(saveData[pageCnt], 1),FR(saveData[pageCnt], 0));
break;
case D_SET:
BF(F_F, F_C, F_C,F_C,F_C,
F_C,FR(maxDistance, 1),FR(maxDistance, 0));
break;
}
}
void KD_dis()
{
if(key == 7)
{
caoZuo = (caoZuo + 1)%2;
}
}
void KD_back()
{
if(key == 7)
{
pageCnt = (pageCnt + 1)%10;
}
}
void KD_SET()
{
if(key == 7)
{
if(maxDistance < 90)
{
maxDistance = maxDistance + 10;
}
else
maxDistance = 0;
}
}
void keyProcess()
{
if(key == 4)
{
Sonic_R();
sonicok = 1;soniccnt = 0;
Rotate_Save((uchar)distance);
Code_Write(0, saveData, 8);
Code_Write(1, &saveData[8], 2);
Code_Write(0, saveData, 8);
Code_Write(1, &saveData[8], 2);
}
if(key == 5)
{
gloSta = (gloSta != D_BACK)? D_BACK:D_DIS;
if(gloSta == D_BACK)
{
pageCnt = 0;
}
}
if(key == 6)
{
gloSta = (gloSta != D_SET)? D_SET:D_DIS;
}
switch(gloSta)
{
case D_DIS:
KD_dis();
break;
case D_BACK:
KD_back();
break;
case D_SET:
KD_SET();
break;
}
}
void Rotate_Save(uchar _dat)
{
uchar i;
for(i = 0; i < 9; i++)
{
saveData[i] = saveData[i+1];
}
saveData[i] = _dat;
}
void UartHandle() interrupt 4
{
if(TI) TI = 0;
if(RI)
{
RI = 0;
if(delay_300.ok == 0)
delay_300.ok = 2;
if(index < 20)
{
revBuf[index++] = SBUF;
}
}
}
void UartProcess()
{
if(delay_300.ok == 1)
{
delay_300.ok = 0;
if(index == 3)
{
SL(LED, 0x0);
if(strncmp(revBuf, "hel", 3) == 0)
{
uchar tmpVal[50];
sprintf(tmpVal, "%bd-%bd-%bd-%bd-%bd-%bd-%bd-%bd-%bd-%bd",
saveData[0],saveData[1],saveData[2],saveData[3],saveData[4],saveData[5],saveData[6],saveData[7],saveData[8],saveData[9]);
Print(tmpVal);
}
}
index = 0;
}
}
void LedProcess()
{
if(sonicok == 1)
{
if(delay_100.ok == 1)
{
delay_100.ok = 0;
if(soniccnt++ < 10)
{
ledData = LedChange(ledData, 0, 2);
}
else
{
ledData = LedChange(ledData, 0, 0);
sonicok = 0;
}
}
}
switch(gloSta)
{
case D_SET:
if(!Check(ledData, 6))
{
ledData = LedChange(ledData, 7, 0);
ledData = LedChange(ledData, 6, 1);
}
break;
case D_BACK:
if(!Check(ledData, 7))
{
ledData = LedChange(ledData, 6, 0);
ledData = LedChange(ledData, 7, 1);
}
break;
}
}
void main()
{
BPOFF; RLOFF;
SL(LED, ledData);
Timer1Init();
memset(buf, F_C, 8);
CMOD |= 0x08;
Code_Read(0, saveData, 8);
Code_Read(1, &saveData[8], 2);
while(1)
{
DisProcess();
SensorProcess();
UartProcess();
LedProcess();
if(keyState == KS_WA)
{
keyProcess();
keyState = KS_GT;
}
}
}
iic.c
#include "reg52.h"
#include "intrins.h"
#include "type.h"
#define DELAY_TIME 5
#define SlaveAddrW 0xA0
#define SlaveAddrR 0xA1
sbit SDA = P2^1;
sbit SCL = P2^0;
void IIC_Delay(unsigned char i)
{
do{_nop_();}
while(i--);
}
void IIC_Start(void)
{
SDA = 1;
SCL = 1;
IIC_Delay(DELAY_TIME);
SDA = 0;
IIC_Delay(DELAY_TIME);
SCL = 0;
}
void IIC_Stop(void)
{
SDA = 0;
SCL = 1;
IIC_Delay(DELAY_TIME);
SDA = 1;
IIC_Delay(DELAY_TIME);
}
void IIC_SendAck(bit ackbit)
{
SCL = 0;
SDA = ackbit;
IIC_Delay(DELAY_TIME);
SCL = 1;
IIC_Delay(DELAY_TIME);
SCL = 0;
SDA = 1;
IIC_Delay(DELAY_TIME);
}
bit IIC_WaitAck(void)
{
bit ackbit;
SCL = 1;
IIC_Delay(DELAY_TIME);
ackbit = SDA;
SCL = 0;
IIC_Delay(DELAY_TIME);
return ackbit;
}
void IIC_SendByte(unsigned char byt)
{
unsigned char i;
for(i=0; i<8; i++)
{
SCL = 0;
IIC_Delay(DELAY_TIME);
if(byt & 0x80) SDA = 1;
else SDA = 0;
IIC_Delay(DELAY_TIME);
SCL = 1;
byt <<= 1;
IIC_Delay(DELAY_TIME);
}
SCL = 0;
}
unsigned char IIC_RecByte(void)
{
unsigned char i, da;
for(i=0; i<8; i++)
{
SCL = 1;
IIC_Delay(DELAY_TIME);
da <<= 1;
if(SDA) da |= 1;
SCL = 0;
IIC_Delay(DELAY_TIME);
}
return da;
}
void Code_Write(uchar _addr, uchar* _data, uchar _dig)
{
IIC_Start();
IIC_SendByte(0xa0);
IIC_WaitAck();
IIC_SendByte(_addr*8);
IIC_WaitAck();
while(_dig--)
{
IIC_SendByte(*_data++);
IIC_WaitAck();
}
IIC_Stop();
}
void Code_Read(uchar _addr, uchar* _data, uchar _dig)
{
IIC_Start();
IIC_SendByte(0xa0);
IIC_WaitAck();
IIC_SendByte(_addr*8);
IIC_WaitAck();
IIC_Start();
IIC_SendByte(0xa1);
IIC_WaitAck();
_dig--;
while(_dig--)
{
*_data++ = IIC_RecByte();
IIC_SendAck(0);
}
*_data++ = IIC_RecByte();
IIC_Stop();
}
float Adc_Read(uchar _addr, uchar _data)
{
uchar tmpVal;
IIC_Start();
IIC_SendByte(0x90);
IIC_WaitAck();
IIC_SendByte(_addr);
IIC_WaitAck();
IIC_SendByte(_data);
IIC_WaitAck();
IIC_Stop();
IIC_Start();
IIC_SendByte(0x91);
IIC_WaitAck();
tmpVal = IIC_RecByte();
IIC_SendAck(0);
return(IIC_RecByte());
}
init.h
#ifndef _INIT_H
#define _INIT_H
#include "stc15f2k60s2.h"
#include "intrins.h"
#include "string.h"
#include "stdio.h"
#include "type.h"
#define SEL(x) P2=P2&0x1f|x<<5;P2=P2&0x1f
sbit BP = P0^6; sbit RL = P0^4;
#define BPON BP = 1; SEL(5);
#define BPOFF BP = 0; SEL(5);
#define RLON RL = 1; SEL(5);
#define RLOFF RL = 0; SEL(5);
#define F_C 10
#define F_F 11
sbit K1 = P3^0; sbit K2 = P3^1; sbit K3 = P3^2; sbit K4 = P3^3;
extern uchar buf[8];
extern float distance;
extern float adcVal;
extern float preDistance;
extern uchar maxDistance;
extern uchar dac_value;
typedef struct delay
{
uint max;
uint cnt;
uchar ok;
}t_delay;
void SL(uchar _dev, uchar _data);
void BF(uchar _0, uchar _1, uchar _2, uchar _3,
uchar _4, uchar _5, uchar _6, uchar _7);
uchar FR(float _data, uchar _dig);
void Timer1Init(void);
void Run(t_delay* time);
void Sonic_R();
uchar LedChange(uchar _data, uchar _dig, uchar _en);
void Code_Read(uchar _addr, uchar* _data, uchar _dig);
void Code_Write(uchar _addr, uchar* _data, uchar _dig);
float Adc_Read(uchar _addr, uchar _data);
uchar GetKey();
void Rotate_Save(uchar _dat);
void Print(uchar *string);
void UartInit(void);
void Delay8ms() ;
uchar Check(uchar _data, uchar _dig);
#endif
type.h
#ifndef _TYPE_H
#define _TYPE_H
#define uchar unsigned char
#define uint unsigned int
#endif


























 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











