







梯度下降法作为机器学习中较常使用的优化算法,其有着三种不同的形式:批量梯度下降(Batch Gradient Descent)、随机梯度下降(Stochastic Gradient Descent)以及小批量梯度下降(Mini-Batch Gradient Descent)。其中小批量梯度下降法也常用在深度学习中进行模型的训练。接下来,我们将对这三种不同的梯度下降法进行理解。
为了便于理解,这里我们将使用只含有一个特征的线性回归来展开。此时线性回归的假设函数为:
h
θ
(
x
(
i
)
)
=
θ
1
x
(
i
)
+
θ
0
h_{\theta} (x^{(i)})=\theta_1 x^{(i)}+\theta_0
hθ(x(i))=θ1x(i)+θ0
其中
i
=
1
,
2
,
.
.
.
,
m
i=1,2,...,m
i=1,2,...,m 表示样本数。
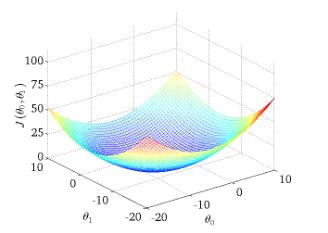
对应的目标函数(代价函数)即为:
J
(
θ
0
,
θ
1
)
=
1
2
m
∑
i
=
1
m
(
h
θ
(
x
(
i
)
)
−
y
(
i
)
)
2
J(\theta_0, \theta_1) = \frac{1}{2m} \sum_{i=1}^{m}(h_{\theta}(x^{(i)}) - y^{(i)})^2
J(θ0,θ1)=2m1i=1∑m(hθ(x(i))−y(i))2
下图为
J
(
θ
0
,
θ
1
)
J(\theta_0,\theta_1)
J(θ0,θ1)与参数
θ
0
,
θ
1
\theta_0,\theta_1
θ0,θ1的关系的图:
1、批量梯度下降(Batch Gradient Descent,BGD)
批量梯度下降法是最原始的形式,它是指在每一次迭代时使用所有样本来进行梯度的更新。从数学上理解如下:
(1)对目标函数求偏导:
Δ
J
(
θ
0
,
θ
1
)
Δ
θ
j
=
1
m
∑
i
=
1
m
(
h
θ
(
x
(
i
)
)
−
y
(
i
)
)
x
j
(
i
)
\frac{\Delta J(\theta_0,\theta_1)}{\Delta \theta_j} = \frac{1}{m} \sum_{i=1}^{m} (h_{\theta}(x^{(i)})-y^{(i)})x_j^{(i)}
ΔθjΔJ(θ0,θ1)=m1i=1∑m(hθ(x(i))−y(i))xj(i)
其中
i
=
1
,
2
,
.
.
.
,
m
i=1,2,...,m
i=1,2,...,m表示样本数,
j
=
0
,
1
j=0,1
j=0,1 表示特征数,这里我们使用了偏置项
x
0
(
i
)
=
1
x_0^{(i)} = 1
x0(i)=1。
(2)每次迭代对参数进行更新:
θ
j
:
=
θ
j
−
α
1
m
∑
i
=
1
m
(
h
θ
(
x
(
i
)
)
−
y
(
i
)
)
x
j
(
i
)
\theta_j := \theta_j - \alpha \frac{1}{m} \sum_{i=1}^{m} (h_{\theta}(x^{(i)})-y^{(i)})x_j^{(i)}
θj:=θj−αm1i=1∑m(hθ(x(i))−y(i))xj(i)
注意这里更新时存在一个求和函数,即为对所有样本进行计算处理,可与下文SGD法进行比较。
伪代码形式为:
repeat
{
θ
j
:
=
θ
j
−
α
1
m
∑
i
=
1
m
(
h
θ
(
x
(
i
)
)
−
y
(
i
)
)
x
j
(
i
)
(
f
o
r
j
=
0
,
1
)
\theta_j := \theta_j - \alpha \frac{1}{m} \sum_{i=1}^{m} (h_{\theta}(x^{(i)})-y^{(i)})x_j^{(i)}(for\ j =0,1)
θj:=θj−αm1∑i=1m(hθ(x(i))−y(i))xj(i)(for j=0,1)
}
优点:
(1)一次迭代是对所有样本进行计算,此时利用矩阵进行操作,实现了并行。
(2)由全数据集确定的方向能够更好地代表样本总体,从而更准确地朝向极值所在的方向。当目标函数为凸函数时,BGD一定能够得到全局最优。
缺点:
(1)当样本数目 m 很大时,每迭代一步都需要对所有样本计算,训练过程会很慢。
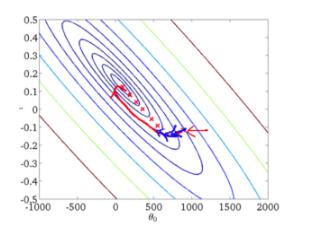
从迭代的次数上来看,BGD迭代的次数相对较少。其迭代的收敛曲线示意图可以表示如下:
2、随机梯度下降(Stochastic Gradient Descent,SGD)
随机梯度下降法不同于批量梯度下降,随机梯度下降是每次迭代使用一个样本来对参数进行更新。使得训练速度加快。
对于一个样本的目标函数为:
J
(
i
)
(
θ
0
,
θ
1
)
=
1
2
(
h
θ
(
x
(
i
)
)
−
y
(
i
)
)
2
J^{(i)}(\theta_0,\theta_1) = \frac{1}{2}(h_{\theta}(x^{(i)})-y^{(i)})^2
J(i)(θ0,θ1)=21(hθ(x(i))−y(i))2
(1)对目标函数求偏导:
Δ
J
(
i
)
(
θ
0
,
θ
1
)
θ
j
=
(
h
θ
(
x
(
i
)
)
−
y
(
i
)
)
x
j
(
i
)
\frac{\Delta J^{(i)}(\theta_0,\theta_1)}{\theta_j} = (h_{\theta}(x^{(i)})-y^{(i)})x^{(i)}_j
θjΔJ(i)(θ0,θ1)=(hθ(x(i))−y(i))xj(i)
(2)参数更新
θ
j
:
=
θ
j
−
α
(
h
θ
(
x
(
i
)
)
−
y
(
i
)
)
x
j
(
i
)
\theta_j := \theta_j - \alpha (h_{\theta}(x^{(i)})-y^{(i)})x^{(i)}_j
θj:=θj−α(hθ(x(i))−y(i))xj(i)
注意,这里不再有求和符号
伪代码形式为:
repeat
{
for i=1,…,m
{
θ
j
:
=
θ
j
−
α
(
h
θ
(
x
(
i
)
)
−
y
(
i
)
)
x
j
(
i
)
(
f
o
r
j
=
0
,
1
)
\theta_j := \theta_j -\alpha (h_{\theta}(x^{(i)})-y^{(i)})x_j^{(i)}(for\ j =0,1)
θj:=θj−α(hθ(x(i))−y(i))xj(i)(for j=0,1)
}
}
优点:
(1)由于不是在全部训练数据上的损失函数,而是在每轮迭代中,随机优化某一条训练数据上的损失函数,这样每一轮参数的更新速度大大加快。
缺点:
(1)准确度下降。由于即使在目标函数为强凸函数的情况下,SGD仍旧无法做到线性收敛。
(2)可能会收敛到局部最优,由于单个样本并不能代表全体样本的趋势。
(3)不易于并行实现。
解释一下为什么SGD收敛速度比BGD要快:
答:这里我们假设有30W个样本,对于BGD而言,每次迭代需要计算30W个样本才能对参数进行一次更新,需要求得最小值可能需要多次迭代(假设这里是10);而对于SGD,每次更新参数只需要一个样本,因此若使用这30W个样本进行参数更新,则参数会被更新(迭代)30W次,而这期间,SGD就能保证能够收敛到一个合适的最小值上了。也就是说,在收敛时,BGD计算了
10
×
30
W
10×30W
10×30W 次,而SGD只计算了
1
×
30
W
1×30W
1×30W次。
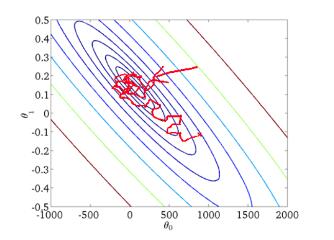
从迭代的次数上来看,SGD迭代的次数较多,在解空间的搜索过程看起来很盲目。其迭代的收敛曲线示意图可以表示如下:
3、小批量梯度下降(Mini-Batch Gradient Descent, MBGD)
小批量梯度下降,是对批量梯度下降以及随机梯度下降的一个折中办法。其思想是:每次迭代 使用 ** batch_size** 个样本来对参数进行更新。
这里我们假设
b
a
t
c
h
s
i
z
e
=
10
batchsize=10
batchsize=10 ,样本数
m
=
1000
m=1000
m=1000 。
伪代码形式为:
repeat
{
for i=1,11,21,31,…,991
{
θ
j
:
=
θ
j
−
α
1
10
∑
k
=
i
(
i
+
9
)
(
h
θ
(
x
(
k
)
)
−
y
(
k
)
)
x
j
(
k
)
(
f
o
r
j
=
0
,
1
)
\theta_j := \theta_j - \alpha \frac{1}{10} \sum_{k=i}^{(i+9)}(h_{\theta}(x^{(k)})-y^{(k)})x_j^{(k)}(for\ j =0,1)
θj:=θj−α101∑k=i(i+9)(hθ(x(k))−y(k))xj(k)(for j=0,1)
}
}
优点:
(1)通过矩阵运算,每次在一个batch上优化神经网络参数并不会比单个数据慢太多。
(2)每次使用一个batch可以大大减小收敛所需要的迭代次数,同时可以使收敛到的结果更加接近梯度下降的效果。(比如上例中的30W,设置batch_size=100时,需要迭代3000次,远小于SGD的30W次)
(3)可实现并行化。
缺点:
(1)batch_size的不当选择可能会带来一些问题。
batch_size的选择带来的影响:
(1)在合理地范围内,增大batch_size的好处:
a. 内存利用率提高了,大矩阵乘法的并行化效率提高。
b. 跑完一次 epoch(全数据集)所需的迭代次数减少,对于相同数据量的处理速度进一步加快。
c. 在一定范围内,一般来说 Batch_Size 越大,其确定的下降方向越准,引起训练震荡越小。
(2)盲目增大batch_size的坏处:
a. 内存利用率提高了,但是内存容量可能撑不住了。
b. 跑完一次 epoch(全数据集)所需的迭代次数减少,要想达到相同的精度,其所花费的时间大大增加了,从而对参数的修正也就显得更加缓慢。
c. Batch_Size 增大到一定程度,其确定的下降方向已经基本不再变化。
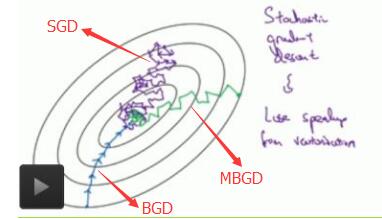
下图显示了三种梯度下降算法的收敛过程:














 860
860











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









