









持续更新。。。。。。。。。。。。。。。
【Castle-X】模块安装
一、Castle-X机器人底盘
1.1 结构概述
Castle-X机器人底盘其整体硬件结构可分为三大部分:分别是驱动执行系统、环境感知系统和电气系统。
- 驱动执行系统负责机器人的移动管理
- 环境感知系统则负责对机器人周围环境的感知,通过传感器获取周围环境的信息。
- 电气系统则是机器人的大脑以及血管动脉,负责机器人的控制、执行、电源供给等
三者互相配合,缺一不可。
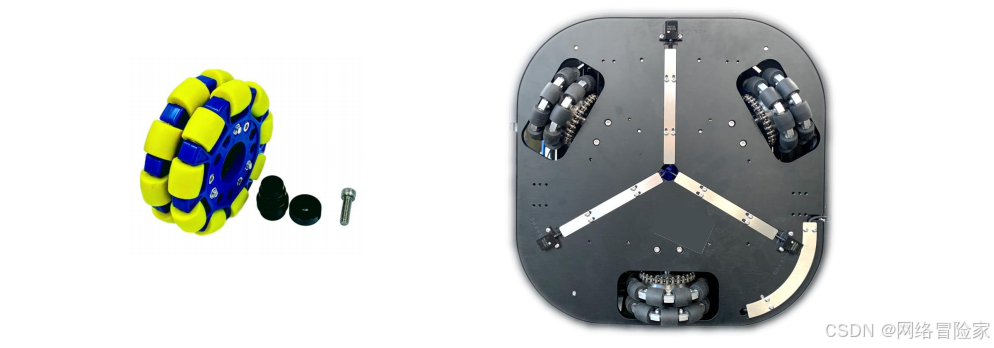
1.2 驱动执行结构
Castle-X机器人底盘驱动执行系统由三个欧米轮互成120度夹角安装,三个直流减速电机分别带动三个欧米轮提供服务机器人移动的动力。
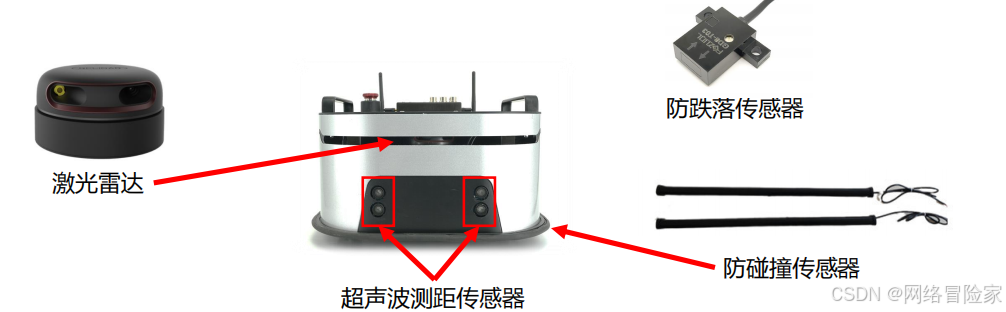
1.3 环境传感器
安装了两个超声波测距传感器和一个激光雷达传感器,使得机器人能够感知周围的环境,此外还安装了三个防跌落传感器和一个防碰撞传感器用于判断机器人当前是否处于安全状态。
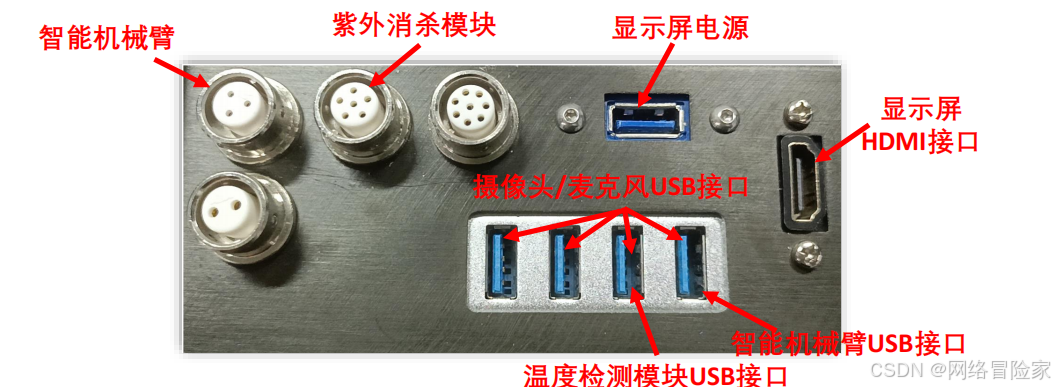
1.4 电气系统
Castle-x机器人底盘带有急停按钮、WIFI模块,后侧还带有两个扬声器,电源开关按钮

Castle-x机器人底盘与其他模块的接口连接
1.5 Castle-x机器人底盘测试
- 激光雷达传感器超声波传感器防碰撞传感器
- 防跌落传感器
- 陀螺仪
- 键盘控制
- 里程计
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











