卡尔曼滤波的5条公式

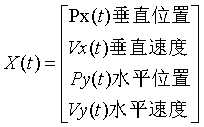
- 首先分析状态变量X(t),由于GPS位移和速度都分为水平和垂直水平
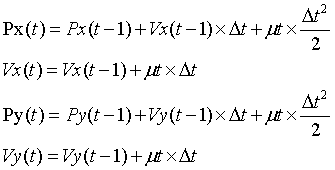
- 接着分析状态偏移矩阵
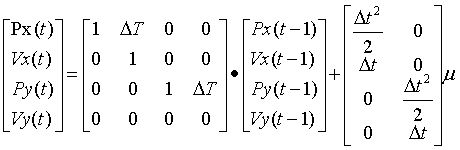
接着将上述式子转化成矩阵
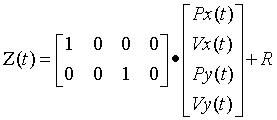
- 分析观测矩阵
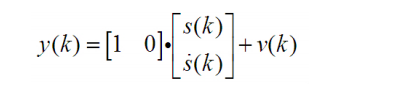
将状态量带入得
package com.zz.meridian.KalmanFilter4;
import Jama.Matrix;
import java.util.ArrayList;
import java.util.List;
import java.util.concurrent.atomic.AtomicInteger;
import java.util.concurrent.atomic.AtomicReference;
public class KalmanGpsFilter4 {
public static void main(String[] args) {
List<ShipTrajectory> data=new ArrayList<>();
data.add(new ShipTrajectory(1.,2.));
data.add(new ShipTrajectory(3.,4.));
data.add(new ShipTrajectory(5.,6.));
dataClean(data);
}
static class ShipTrajectory{
double JD;
double WD;
public ShipTrajectory(double JD, double WD) {
this.JD = JD;
this.WD = WD;
}
public double getJD() {
return JD;
}
public void setJD(double JD) {
this.JD = JD;
}
public double getWD() {
return WD;
}
public void setWD(double WD) {
this.WD = WD;
}
}
//数据清洗-卡尔曼滤波对GPS轨迹数据清洗
public static List<ShipTrajectory> dataClean(List<ShipTrajectory> data){
//时间间隔(时间间隔)
double T = 1.0/900;
//经度方差(水平位置)
double JDFX = 5.8;
//纬度方差(垂直位置)
double WDFX = 1.3;
//状态矩阵(初始值不重要,会自动更正)
double[][] X_ARRAY = {
{data.get(0).getJD()},
{0},
{data.get(0).getWD()},
{0}
};
AtomicReference<Matrix> X = new AtomicReference<>(new Matrix(X_ARRAY));
//状态协方差矩阵(初始值不重要,会自动更正)
double[][] P_ARRAY = {
{1,0,0,0},
{0,1,0,0},
{0,0,1,0},
{0,0,0,1}
};
AtomicReference<Matrix> P = new AtomicReference<>(new Matrix(P_ARRAY));
//状态转移矩阵
double[][] F_ARRAY = {
{1,T,0,0},
{0,1,0,0},
{0,0,1,T},
{0,0,0,1}
};
Matrix F = new Matrix(F_ARRAY);
//状态转移协方差矩阵(对误差忽略不计)
double[][] Q_ARRAY ={
{0.0001,0,0,0},
{0,0.0001,0,0},
{0,0,0.0001,0},
{0,0,0,0.0001}
};
Matrix Q = new Matrix(Q_ARRAY);
//观测矩阵(观测经度纬度)
double[][] H_ARRAY = {
{1,0,0,0},
{0,0,1,0}
};
Matrix H = new Matrix(H_ARRAY);
//观测噪声方差(对角线为各维度方差)
double[][] R_ARRAY = {
{JDFX,0},
{0,WDFX},
};
Matrix R = new Matrix(R_ARRAY);
//I 维度为4
double[][] I_ARRAY = {
{1,0,0,0},
{0,1,0,0},
{0,0,1,0},
{0,0,0,1}
};
Matrix I = new Matrix(I_ARRAY);
List<ShipTrajectory> removeShipList = new ArrayList<>();
AtomicInteger i= new AtomicInteger();
data.forEach(ship -> {
try {
i.getAndIncrement();
//==============第1条式子==============
Matrix X_ = F.times(X.get());
//==============第2条式子==============
Matrix P_ = F.times(P.get()).times(F.transpose()).plus(Q);
//==============第3条式子==============
Matrix K = P_.times(H.transpose()).times(H.times(P_).times(H.transpose()).plus(R).inverse());
//==============第4条式子==============
//水平位置
double Px_tt=ship.getJD();
//垂直位置
double Py_tt=ship.getWD();
double[][] Z_ARRAY = {
{Px_tt},
{Py_tt}
};
Matrix Z = new Matrix(Z_ARRAY);
X.set(X_.plus(K.times(Z.minus(H.times(X_)))));
//==============第5条式子==============
P.set(I.minus(K.times(H)).times(P_));
//==============数据清洗==============
double abs = Math.abs(ship.getWD() - X.get().get(2, 0));
double abs1 = Math.abs(ship.getJD() - X.get().get(0, 0));
//清除噪声
if(abs1>=0.8||abs>=0.8){
removeShipList.add(ship);
System.out.println();
System.out.println("\033[32;4m" + "======================================《《filter start》》 ===================================================" + "\033[0m");
System.out.println("序号: "+i.get()+" old-JD:"+Px_tt+" old-WD:"+Py_tt+" new-JD:"+X.get().get(0,0)+" new-WD:"+X.get().get(2,0));
System.out.println("\033[32;4m" + "=============================================================================================================" + "\033[0m");
System.out.println();
}else {
System.out.println("序号: "+i.get()+" old-JD:"+Px_tt+" old-WD:"+Py_tt+" new-JD:"+X.get().get(0,0)+" new-WD:"+X.get().get(2,0));
}
} catch (Exception e) {
e.printStackTrace();
}
});
System.out.println("count :"+removeShipList.size());
data.removeAll(removeShipList);
return data;
}
}























 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









