






程序编码参考经典的细化或者骨架算法文章:
T. Y. Zhang and C. Y. Suen, “A fast parallel algorithm for thinning digital patterns,” Comm. ACM, vol. 27, no. 3, pp. 236-239, 1984.
它的原理也很简单:
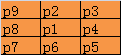
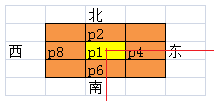
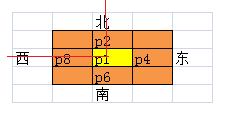
我们对一副二值图像进行骨架提取,就是删除不需要的轮廓点,只保留其骨架点。假设一个像素点,我们定义该点为p1,则它的八邻域点p2->p9位置如下图所示,该算法考虑p1点邻域的实际情况,以便决定是否删除p1点。假设我们处理的为二值图像,背景为黑色,值为0,要细化的前景物体像素值为1。
算法的描述如下。
首先复制源图像到目地图像,然后建立一个临时图像,接着执行下面操作:
1. 把目地图像复制给临时图像,对临时图像进行一次扫描,对于不为0的点,如果满足以下四个条件,则在目地图像中删除该点(就是设置该像素为0),这里p2,…,p9是对应位置的像素灰度值(其为1或者0)。
a. 2<= p2+p3+p4+p5+p6+p7+p8+p9<=6
大于等于2会保证p1点不是端点或孤立点,因为删除端点和孤立点是不合理的,小于等于6保证p1点是一个边界点,而不是一个内部点。等于0时候,周围没有等于1的像素,所以p1为孤立点,等于1的时候,周围只有1个灰度等于1的像素,所以是端点(注:端点是周围有且只能有1个值为1的像素)。

b. p2->p9的排列顺序中,01模式的数量为1,比如下面的图中,有p2p3 => 01, p6p7=>01,所以该像素01模式的数量为2。
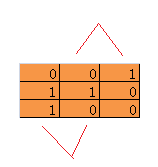
之所以要01模式数量为1,是要保证删除当前像素点后的连通性。比如下面的图中,01模式数量大于1,如果删除当前点p1,则连通性不能保证。

c. P2*p4*p6 = 0
d. p4*p6*p8 = 0
在第一次子迭代中,只是移去东南的边界点,而不考虑西北的边界点,注意p4,p6出现了2次,就是说它们有一个为0,则c,d就满足。
2. 接下来,把目地图像再次复制到临时图像,接着对临时图像进行一次扫描,如果不为0的点它的八邻域满足以下4个条件,则在目地图像中删除该点(就是设置该像素为0)
a. 2<= p2+p3+p4+p5+p6+p7+p8+p9<=6
b. p2->p9的排列顺序中,01模式的数量(这里假设二值图非零值为1)为1。
c. p2*p4*p8 = 0
d. p2*p6*p8 = 0
第二次迭代则相反,会移去西北的边界点,注意p2,p8出现了2次,就是说它们有一个为0,则c,d就满足。
执行完上面两个步骤后,就完成了一次细化算法,我们可以多次迭代执行上述过程,得到最终的骨架图。
细化算法代码如下:
void gThin::cvThin(cv::Mat& src, cv::Mat& dst, int intera)
{
if(src.type()!=CV_8UC1)
{
printf("只能处理二值或灰度图像\n");
return;
}
//非原地操作时候,copy src到dst
if(dst.data!=src.data)
{
src.copyTo(dst);
}下面是三次细化的结果,可以看出在垂直方向H变短了,感觉这是不完美的地方。
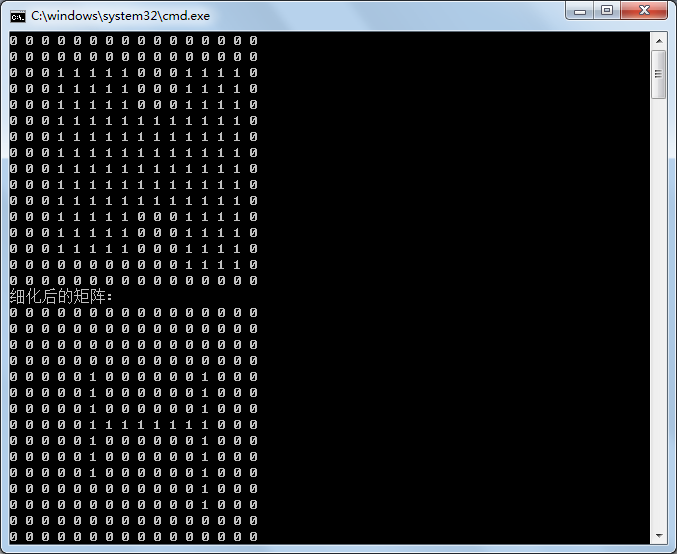
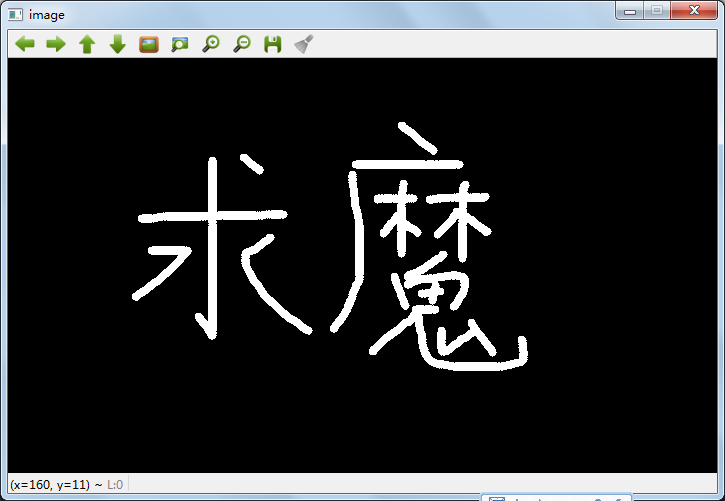
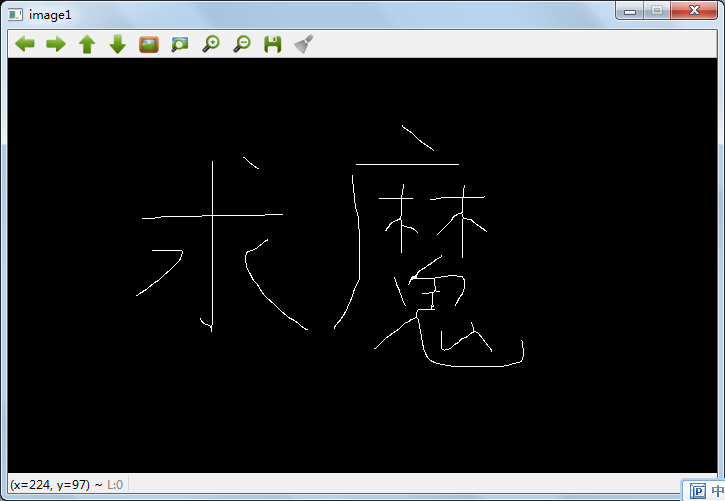
下面我们对两个汉字进行5次迭代细化,结果如下:
程序代码:工程FirstOpenCV11















 1591
1591

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









